

ekzamen_ORLiRN
.pdfвысоте до 8—10км в полярных районах и до 16—18км |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
в тропических широтах Земного шара. В тропосфере |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
сосредоточена основная часть водяного пара, |
При |
этом, |
если |
величина |
Z превышает |
величину |
||||||||||||||||
образуются облака и турбулентные потоки, что влияет |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
на |
распространение |
радиоволн, |
|
особенно |
заданного |
порога |
h, |
то принимается |
решение |
γ1 |
в |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
миллиметрового, сантиметрового и дециметрового |
пользу гипотезы |
H1, |
т.е. о наличии |
сигнала |
S(t) |
в |
||||||||||||||||
диапазонов, используемых в радиолокации и ближней |
наблюдаемом сигнале |
ζ(t). Если величина Z меньше h, |
||||||||||||||||||||
радионавигации. |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Отражение радиоволн от ионосферы наиболее сильно |
то принимается решение γ0 в пользу гипотезы H0, т.е. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
сказывается на декаметровых и более длинных волнах, |
об |
отсутствии |
полезного |
сигнала в наблюдаемом |
||||||||||||||||||
применяемых в системах навигации и связи |
|
|
сигнале |
ζ(t). |
Величина порога h определяется |
|||||||||||||||||
Влияние затухания радиоволн в тропосфере связано с |
||||||||||||||||||||||
выбранным |
критерием оптимальности обнаружения. |
|||||||||||||||||||||
их |
поглощением молекулами |
кислорода |
|
и водяного |
||||||||||||||||||
|
Алгоритм |
|
обработки |
называется |
корреляционной |
|||||||||||||||||
пара, гидрометеорами (дождь, туман, снег) и твердыми |
|
|||||||||||||||||||||
обработкой сигналов. Структурная схема оптимальной |
||||||||||||||||||||||
частицами. |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
системы |
обработки, |
реализующая |
этот |
алгоритм, |
||||||||||
15. |
Обнаружение |
|
детерминированного |
|
||||||||||||||||||
|
|
изображена на рисунке и называется корреляционным |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
одиночного импульсного сигнала на фоне помехи с |
|
|||||||||||||||||||||
|
обнаружителем |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
равномерным |
энергетическим |
спектром |
- |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
аналоговая |
обработка. |
|
Статистические |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
характеристики достаточной статистики. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Задача системы обнаружения сигнала - принять |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
решение: присутствует ли в наблюдаемом на интервале |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
времени (0,Т) |
сигнале |
ζ(t) |
полезный |
сигнал |
S(t), |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
замаскированный помехой n(t), или ζ(t) содержит
только помеху, т.е. система должна осуществлять проверку двух гипотез:
H0 : ζ(t) = n(t); 0 ≤ t ≤ T (1)
H1 : ζ(t) = S(t) + n(t); 0 ≤ t ≤ T.
Все параметры полезного сигнала S(t) точно известны. Помеха n(t), на фоне которой наблюдается полезный сигнал, представляет собой "белый" гауссов шум со спектральной плотностью N0/2. Модель "белого" шума удобно использовать для помех, спектральную плотность которых можно считать постоянной на интервале частот, занимаемым спектром полезного сигнала, при этом упрощается решение задачи обнаружения сигнала.
Обычно в радиотехнических системах применяют узкополосные сигналы, ширина спектра которых мала по сравнению со значением центральной частоты спектра. Удобной математической моделью такого
сигнала является S(t) = Э a(t) cos[ω0 t +ϕ (t) +ϕ0 ] ,
где Э - энергия полезного сигнала, ω0 - несущая
частота, a(t) и ϕ(t) - законы амплитудной и фазовой модуляции сигнала, представляющие собой медленно
меняющиеся по сравнению с cosω0t функции времени.
Синтез обнаружителя при такой постановке задачи |
а) копия ожидаемого сигнала; б) наблюдаемый сигнал ζ |
||||
методами |
статистической |
теории |
обнаружения |
||
сигналов приводит к алгоритму обработки сигналов, |
(t); в) результат перемножения сигналов Sa(t) и ζ(t); г) |
||||
связанному |
с вычислением |
так |
называемого |
результат интегрирования произведения за время |
|
корреляционного интеграла Z и сравнении его с |
наблюдения [0,T]. При изображении реализации |
||||
порогом h |
|
|
|
|
помехи n(t) учтено, что она имеет полосу, существенно |
большую, чем полезный сигнал, что позволяет считать

её "белым" шумом. При справедливости гипотезы H0 |
Разрешающая способность по скорости: |
|
|||||||||||||||||||||||
произведение Sa(t)·ζ(t) соответствует знакопеременным |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
колебаниям помехи, промодулированным опорным |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
колебанием |
Sa(t) |
(копией |
полезного сигнала). При |
Разрешающая способность по скорости ∆Vr при |
|||||||||||||||||||||
гипотезе H1 наряду с шумовой составляющей Sa(t)·n(t) |
|||||||||||||||||||||||||
простом сигнале определяется шириной спектра |
|||||||||||||||||||||||||
дополнительно |
|
появляется |
сигнальная |
Sa(t)·S(t), |
сигнала ∆f. Для увеличения разрешающей способности |
||||||||||||||||||||
которая при интегрировании даёт регулярное смещение |
по скорости (уменьшения ∆Vr) необходимо уменьшать |
||||||||||||||||||||||||
величины Z в область положительных значений. Рис.г |
|||||||||||||||||||||||||
ширину |
спектра |
сигнала |
∆f, |
т. |
е. |
увеличивать |
|||||||||||||||||||
иллюстрирует тот факт, что значение корреляционного |
|||||||||||||||||||||||||
длительность зондирующего сигнала τи. |
|
|
|||||||||||||||||||||||
интеграла за счёт того, что в наблюдаемом сигнале |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
всегда присутствует помеха n(t), является величиной |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
случайной и непредсказуемо изменяется от наблюдения |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
к наблюдению (для различных реализаций помехи) |
т. е. совместная разрешающая способность по |
||||||||||||||||||||||||
даже при справедливости одной и той же гипотезы. |
дальности и скорости при простом сигнале от его |
||||||||||||||||||||||||
Распределение плотности вероятности W(Z/0) при |
длительности τи и его ширины спектра ∆f не зависит. |
||||||||||||||||||||||||
отсутствии полезного сигнала S(t) имеет нулевое |
Улучшение ∆R возможно только за счет ухудшения ∆Vr |
||||||||||||||||||||||||
среднее значение и дисперсию N0/2, при его наличии |
и наоборот. |
|
|
|
|
|
|
|
|
||||||||||||||||
сдвигается на величину √Э. |
|
|
|
|
|
|
|
17. |
Разрешающая |
способность |
по |
дальности и |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скорости для сложных сигналов |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сложные сигналы имеют обычно достаточно большую |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
длительность, и в то же время спектр во много раз |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шире, чем спектр простого сигнала такой же длитель- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ности. Несоответствие ширины спектра сложных |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сигналов их длительности достигается введением |
|||||||||||
Этот |
сдвиг |
и |
определяет |
физическую |
возможность |
внутриимпульсной |
модуляции – |
частотной, |
фазовой |
||||||||||||||||
или комбинированной. Причина расширения спектра |
|||||||||||||||||||||||||
обнаружения полезного сигнала на фоне помехи. Если, |
|||||||||||||||||||||||||
сложного |
сигнала |
состоит |
в |
том, |
что |
функция, |
|||||||||||||||||||
например, используется критерий Неймана-Пирсона, то |
модулирующая сигнал, является не прямоугольной, как |
||||||||||||||||||||||||
выбором |
уровня |
порога |
h всегда |
можно |
обеспечить |
||||||||||||||||||||
заданное |
значение вероятности |
ложной |
тревоги |
F |
у простого сигнала, а более изрезанной. Ширина |
||||||||||||||||||||
спектра радиосигнала определяется только видом его |
|||||||||||||||||||||||||
(площадь под кривой W(Z/0) справа от значения Z=h). |
комплексной огибающей (скоростью изменения ее во |
||||||||||||||||||||||||
При этом вероятность правильного обнаружения D |
времени) и не зависит от значения несущей частоты. |
||||||||||||||||||||||||
определяется площадью под кривой W(Z/S) справа от |
|||||||||||||||||||||||||
Z=h. Чем больше энергия сигнала, тем больше D. |
Чем более изрезана комплексная огибающая сигнала. |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Оптимальность |
корреляционного |
обнаружителя |
в |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
смысле критерия Неймана-Пирсона заключается в том, |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
что никакая другая система обработки сигналов в |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
рассматриваемых условиях, при заданных вероятности |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
ложной тревоги F и энергии сигнала Э не может |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
обеспечить |
|
большего |
|
значения |
|
вероятности |
|
|
|
|
|
|
|
|
|
|
|
||||||||
правильного обнаружения D. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
16. |
Разрешающая способность по |
дальности |
и |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
скорости для простых сигналов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
При применении простых сигналов невозможно |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
получить |
|
высокую |
разрешающую |
способность |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
одновременно по дальности и скорости: увеличение |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
разрешающей способности по дальности неизбежно |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
приводит к ухудшению разрешающей способности по |
Разрешающая способность по дальности у сложного |
||||||||||||||||||||||||
скорости |
|
|
|
|
|
|
|
|
|
|
|
|
сигнала больше, чем у простого сигнала той же |
||||||||||||
Разрешающая |
|
способность |
по |
|
дальности: |
длительности. |
|
|
|
|
|
|
|
|
|||||||||||
Для |
увеличения |
разрешающей |
способности |
по |
В |
то же |
время, демодулируя сложный сигнал, т.е. |
||||||||||||||||||
устраняя внутриимпульсную модуляцию при приеме, |
|||||||||||||||||||||||||
дальности при простом сигнале (уменьшения ∆R) надо |
|||||||||||||||||||||||||
можно получить из сложного сигнала простой, равный |
|||||||||||||||||||||||||
уменьшать длительность зондирующего сигнала τ, что |
|||||||||||||||||||||||||
сложному |
сигналу |
по |
длительности. |
Этот |
простой |
||||||||||||||||||||
эквивалентно расширению его спектра ∆f, так как для |
|||||||||||||||||||||||||
сигнал, |
полученный |
из |
сложного, |
на |
выходе |
||||||||||||||||||||
простого сигнала τи ∙ ∆f = 1 |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||

демодулятора будет иметь большую длительность, а значит – узкий спектр и, следовательно, большую разрешающую способность по скорости.
Таким образом, с одной стороны, сложный сигнал за счет внутриимпульсной модуляции при большой длительности имеет широкий спектр и обеспечивает высокую разрешающую способность по дальности, а с другой стороны, из него с помощью демодуляции можно сделать простой сигнал той же длительности, который обеспечивает высокую разрешающую способность по скорости.
Операция получения из сложного сигнала простого сигнала малой длительности называется сжатием по времени и выполняется СФ, а операция получения простого сигнала большой длительности называется сжатием по спектру и выполняется демодулятором.
18.Фазоманипулированные сигналы.
В качестве строительного элемента (символа) берется короткий прямоугольный радиоимпульс (простой сигнал), а результирующий ФМ-сигнал оказывается набором простых сигналов, фаза которых от символа к символу меняется скачком. В общем случае величина скачка фазы может быть произвольной. Рассмотрим случай, когда фаза символов принимает лишь два дискретных значения: 0 и 180°.
На рис. 22, а показан простой сигнал с длительностью τ1 и шириной спектра ∆f1 = 1/τ1. На рис. 22, б пять простых сигналов составляют сложный. Первый символ сложного сигнала по фазе совпадает с начальной фазой первого простого импульса. Обозначим его фазу как 0. Второй символ стоит вплотную к первому и перевернут по фазе (π), третий и четвертый имеют ту же фазу, что и первый, и т. д. В результате создается кодовое слово из 5 символов со следующим кодом: 0π00π.
Если бы все N символов имели одинаковую с первым символом фазу, то суммарный сигнал был бы попрежнему простым, только более длинным. Спектр его сузился бы в N раз, так как τ2 = Nτ1 и
Если фазы символов чередовать периодически, то мы получили бы периодическую последовательность импульсов, спектр которой тоже был бы периодическим, не сплошным. Можно, однако, так подобрать последовательность символов, что спектр останется широким (∆f2=∆f1) и сплошным. Длительность же τ2 возрастает в N раз.
Таким образом, база результирующего сигнала
т. е. сигнал действительно отвечает определению сложного сигнала.
ФМ-сигнал, использующий код Баркера: код из N
символов, у которого главный максимум АКФ имеет высоту N, а высота боковых лепестков не превышает единицы.
Последовательность 0π00πππ является кодом Баркера из 7 символов. Все достоинства этой последовательности выявляются после приема отраженного сигнала и его оптимальной обработки

Импульсная характеристика линейного фильтра описывает реакцию системы на входное воздействие в
виде единичного импульса δ(τ), поданного в момент времени τ =0, и принимает отличные от нуля значения
лишь при τ ≥ 0, так как следствие не возникает раньше вызывающей его причины.
19. Обнаружение детерминированного
одиночного импульсного сигнала на фоне помехи с равномерным энергетическим спектром на согласованном фильтре.
Обеспечивает значение корреляционного интеграла при любом времени запаздывания tз
Выходное напряжение фильтра с импульсной характеристикой вида (6) в момент времени υ+tз равно,
с точностью до масштабного множителя С, значению корреляционного интеграла для времени запаздывания
Uвых(υ + tз)=СZ(tз). Величины С и υ - постоянные,
определяемые параметрами фильтра. Напряжение на выходе фильтра равно (при С = 1) значению корреляционного интеграла в момент окончания полезного сигнала t=T. Такой фильтр позволяет реализовать оптимальный алгоритм обнаружения сигнала и называется оптимальным фильтром.
Передаточная характеристика фильтра связана с его импульсной характеристикой преобразованием Фурье
Передаточная характеристика фильтра должна с точностью до постоянного множителя e-jωT совпадать с
комплексно-сопряжённым спектром полезного сигнала Поэтому, такой фильтр называется согласованным с сигналом Sa(t) или просто согласованным фильтром Форма полезного сигнала на выходе фильтра Sвых(t), то оказывается, что она совпадает с точностью до постоянного множителя с автокорреляционной функцией полезного сигнала.
Интеграл соответствует математической операции интегральной свёртки, который выражает напряжение на выходе линейного фильтра, импульсная
характеристика которого равна h(τ)=Sa(υ-τ), что соответствует зеркальному отображению функции Sa(τ) относительно прямой, проходящей через точку τ
=υ / 2.
Структурная схема оптимального обнаружителя с согласованным фильтром
Согласованный фильтр не реагирует на начальную фазу полезного сигнала, но её необходимо знать для управления моментом сравнения напряжения на выходе

фильтра с порогом. Момент этот для фильтра с минимальной задержкой должен точно соответствовать окончанию полезного сигнала, при этом отношение сигнал/помеха на выходе фильтра максимально
20. Импульсная и частотная характеристики СФ. (Прошлый вопрос+)
Согласованный фильтр предназначен для максимизации отношения сигнал/шум на своем выходе при приеме сигнала на фоне белого шума со спектральной плотностью мощности N(f) = N0. Не зависит от временной задержки сигнала τ и на выходе СФ представляет собой сигнал, который является разверткой во времени АКФ входного сигнала.
Импульсная характеристика СФ является зеркальным отображением сигнала S(t) с запаздыванием Т, равным длительности сигнала τи: h(t)=ku(T–t), где k – амплитудный множитель (коэффициент усиления СФ)
Частотная характеристика СФ Ý(jw) c точностью до произвольного вещественного множителя k и множителя запаздывания ехр[–jwT] представляет собой функцию, комплексно сопряженную со спектром входного сигнала G(jw): Ý(jw) = k ехр[–jwT ]G*(jw)
Амплитудно-частотная характеристика (АЧХ)
согласованного фильтра повторяет амплитудночастотный спектр принимаемого сигнала с точностью до множителя k: |Y(jw)| = k|G*(jw)|, а фазочастотная характеристика (ФЧХ) j(jw) состоит из двух слагаемых: первое имеет знак, обратный знаку фазочастотного спектра принимаемого сигнала Y(jw), а второе представляет собой линейную функцию –wT: j (jw) = – Y(jw) – wT
а-спектр сигнала У сигнала, снимаемого с выхода СФ в момент времени
Т (т. е. когда весь сигнал «вошел» в СФ), все частотные составляющие спектра сигнала будут синфазны. Разности фаз между частотными составляющими спектра сигнала, определяемые фазочастотным спектром Y(jw), будут скомпенсированы в этот момент ФЧХ согласованного фильтра – рисунок б На рис. в – д показаны три составляющие спектра
сигнала на частотах f1, f2 и f3, синфазные в момент времени Т = τи полного вхождения сигнала в СФ, а на рис. е – их сумма. Такое синфазное суммирование различных частотных составляющих спектра сигнала в момент времени Т вызывает появление на выходе СФ максимального значения сигнала, величина которого равна энергии входного сигнала Е. Для всех других моментов времени (t 0 ÷ 2T, t ≠ T) значение выходного сигнала меньше, чем в момент времени Т, так как фазочастотный спектр сигнала не компенсируется ФЧХ фильтра, и частотные составляющие спектра сигнала суммируются несинфазно.
Сигнал на выходе СФ является разверткой во времени АКФ входного сигнала и имеет спектр
Gвых(jw) = Y(jw)G(jw) = kexp[–jwT]|G(jw)|2
Принцип действия СФ для сложного сигнала с ЧМ и простого радиоимпульса такой же длительности

21.Форма сигналов на выходе коррелятора и СФ, максимальное значение сигнальной составляющей на выходе СФ.
Вопросы 19,20
22.Обнаружение одиночного импульсного сигнала с неизвестной начальной фазой., [1] с.13-16.
При обнаружении сигнала с полностью известными
параметрами |
единственным |
источником |
неопределённости в |
принимаемом |
сигнале ζ(t) была |
отражения и распространения зондирующего сигнала и т.д. Строго говоря, это приводит к неизвестности задержки огибающей сигнала. Однако длительность сигнала всегда много больше, чем период несущей частоты, и небольшие изменения задержки можно рассматривать только как изменения фазы, а время начала и конца полезного сигнала считать известным с точностью до периода высокой частоты.
Поведение выборочных значений случайной начальной фазы ϕ0 характеризуется плотностью вероятности W(ϕ0 ) Когда начальная фаза может равновероятно принимать
любое значение в интервале от 0 до 2π,
ПУ - пороговое устройство.
ГКС – генератор калибровочных сигналов В качестве опорных колебаний на умножители
подаются сдвинутые по фазе на 90о колебания высокой частоты. Такие колебания в радиотехнике называются квадратурными. Наличие двух каналов исключает потерю полезного сигнала за счёт незнания его начальной фазы При квадратурном суммировании помех в
двухканальном корреляторе происходит увеличение их интенсивности и изменение функции распределения от нормальной к обобщённой, что приводит к увеличению вероятности появления больших выбросов помехи.
аддитивная помеха. Но такая ситуация на практике |
|
|
|
|
|
|
|
встречается крайне редко. Как правило, приходится |
Более простую реализацию устройства можно получить |
||||||
иметь дело с ситуацией, когда известна форма сигнала, |
при использовании согласованного фильтра, который |
||||||
а ряд его параметров на входе приёмного устройства |
не реагирует на изменение начальной фазы полезного |
||||||
радиотехнической системы неизвестен. Такими |
сигнала. Согласованный фильтр в момент времени, |
||||||
параметрами могут быть амплитуда, начальная фаза, |
соответствующий |
окончанию |
действия |
полезного |
|||
время прихода, несущая частота, угловое положение |
сигнала, |
формирует |
на |
выходе |
напряжение, |
||
источника сигнала и т. д. |
пропорциональное |
значению |
корреляционного |
||||
В радиолокации излучаемый сигнал, представляющий |
интеграла. При неизвестной начальной фазе сигнала |
||||||
собой высокочастотный импульс, при отражении от |
устройство |
должно |
|
выделять |
огибающую |
||
объекта приобретает случайный фазовый сдвиг, что |
автокорреляционной функции, значение которой в |
||||||
приводит к неизвестности начальной фазы полезного |
момент окончания действия полезного сигнала равно |
||||||
сигнала при приёме. Неизвестная начальная фаза не |
модульному значению корреляционного интеграла. Для |
||||||
несёт полезной информации об объекте при решении |
этого необходимо включить в схему после |
||||||
задачи обнаружения, а только затрудняет это решение, |
согласованного фильтра амплитудный детектор. |
||||||
т. е. является мешающим параметром. |
Синхронный детектор в данной ситуации использовать |
||||||
Случайный фазовый сдвиг вызывается перемещением |
нельзя, так как неизвестна начальная фаза полезного |
||||||
объекта, неизвестностью и изменением условий |
|
|
|
|
|
|
|

сигнала. |
|
|
|
|
Пачки импульсов ω1(t-kTп) снимаются с отводов линии |
||
|
|
|
|
|
|
||
|
|
|
|
|
|
задержки и отличаются от входных импульсов |
|
|
|
|
|
|
|
увеличенной в √2 раз длительностью. Пачка ω2(t) на |
|
|
|
|
|
|
|
выходе сумматора содержит (2M-1) импульс, где М - |
|
|
|
|
|
|
|
число импульсов во входной пачке, имеет огибающую |
|
|
|
|
|
|
|
ромбической формы с длительностью по нулям 2МТп. |
|
|
|
|
|
|
|
Амплитудно-частотная характеристика резонансного |
|
23. |
Обнаружение |
|
когерентных |
пачек |
|
усилителя |K1 (f)| имеет колокольную форму, а |
|
|
|
|
|
|
|
||
импульсных сигналов. |
|
|
|
амплитудно-частотная характеристика |K2(f)| второго |
|||
Алгоритм обнаружения когерентных пачек полностью |
|||||||
звена, включающая линию задержки и сумматор, |
|||||||
|
|
|
|
|
|
||
соответствует |
алгоритму |
обнаружения |
является гребенчатой с периодически повторяющимися |
||||
|
|
|
|
|
|
||
детерминированного сигнала |
через интервал 1/Тп зубцами шириной по нулям 2/МTп |
|
Формирование оптимальной импульсной характеристики фильтра может быть осуществлено при использовании резонансного усилителя, согласованного с одиночным импульсом, и последовательно с ним включённой неискажающей линии задержки с отводами и общим сумматором.
Результирующая амплитудно-частотная характеристика всего устройства |K1(f )K2(f)| практически ограничена колокольной характеристикой |K1(f)| и совпадает с гребенчатым амплитудно-частотным спектром когерентной пачки колокольных радиоимпульсов
|
|
|
|
|
|
24. |
Частотный метод измерения дальности. |
|
|||||
|
|
|
|
|
|
Достоинства частотного метода (ЧМ): малая |
|||||||
Импульсная |
характеристика |
резонансного |
усилителя |
минимальная измеряемая высота и высокая точность. |
|||||||||
(т.е. отклик |
|
его на единичный импульс δ(τ)) |
При частотном методе передатчик РЛС излучает |
||||||||||
|
непрерывный частотно-модулированный (ЧМ) сигнал, |
||||||||||||
представляет |
|
собой |
колокольный |
импульс, |
а |
время запаздывания |
отражённого |
сигнала tR, |
|||||
соответствующий зеркально отражённому по времени и |
|||||||||||||
пропорциональное |
дальности |
R, |
определяется |
||||||||||
задержанному |
на определённое время |
задержки |
|||||||||||
посредством измерения |
разностной частоты между |
||||||||||||
ожидаемому |
импульсу, |
с |
которым согласована |
||||||||||
частотами излучаемого и принимаемого сигналов |
|||||||||||||
передаточная характеристика усилителя. На выходе |
|||||||||||||
|
|
|
|
|
|
|
|||||||
сумматора можно при этом добиться (за счёт выбора |
|
|
|
|
|
|
|
||||||
расположения отводов линии задержки, их числа и |
|
|
|
|
|
|
|
||||||
коэффициентов передачи) получения такой пачки |
|
|
|
|
|
|
|
||||||
колокольных радиоимпульсов, которая совпадает с |
|
|
|
|
|
|
|
||||||
зеркально отражённой по времени и задержанной на |
|
|
|
|
|
|
|
||||||
определённое время задержки ожидаемой пачкой |
|
|
|
|
|
|
|
||||||
колокольных радиоимпульсов. |
|
|
|
|
|
|
|
|
|
||||
Процесс оптимальной фильтрации пачки |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
Применяется модуляция по симметричному линейно- |
|||||||
|
|
|
|
|
|
ломаному закону (а). Генератор высокой частоты |
|||||||
|
|
|
|
|
|
вырабатывает непрерывные колебания UПРД (б), частота |
|||||||
|
|
|
|
|
|
которых fПРД под действием модулирующего |
|||||||
|
|
|
|
|
|
напряжения изменяется |
относительно среднего |
||||||
|
|
|
|
|
|
значения f0 на величину девиации частоты fД с |
|||||||
|
|
|
|
|
|
периодом модуляции ТМ (в). Сигнал генератора через |
|||||||
|
|
|
|
|
|
делитель мощности поступает в передающую антенну и |
|||||||
|
|
|
|
|
|
излучается в направлении земли. |
|
|
|
||||

Полное изменение частоты зондирующего сигнала fМ =2 fД – полоса качания частоты или полоса модуляции. В РВ с ЧМ сигналом всегда выполняется условие f0 fМ. Это вызвано тем, что антеннофидерный тракт и высокочастотный генератор не допускают больших отклонений частоты от номинала. Отражённый сигнал необходимо принимать одновременно с излучением зондирующего сигнала.
Отражающая поверхность является протяжённой вследствие конечной ширины диаграммы направленности. Сигнал, отражённый от точечной неподвижной цели, по форме точно повторяет зондирующий сигнал, но с запаздыванием на время tR=2R/с. Зависимость частоты принимаемого сигнала fПРМ от времени изображена на рис. (в) Она изменяется по такому же линейно-ломаному закону, как и частота излучаемого сигнала, но с запаздыванием на время tR: fПРМ (t) = fизл (t - tR ). В текущий момент времени t принимается тот сигнал, который был излучён раньше - в момент t - tR
Принимаемый сигнал поступает на смеситель. Одновременно небольшая часть мощности колебаний передатчика ответвляется с помощью делителя мощности и подаётся на смеситель приёмника в качестве гетеродинирующего сигнала. На выходе смесителя с помощью фильтра выделяется разностная частота, равная абсолютному значению разности мгновенных частот излучаемых и принимаемых колебаний
FP( t ) = | fПРД ( t ) – fПРМ ( t ) |
2t |
R |
|
F |
|
|
|
|
|
F |
|
|
2R |
|
|
F |
|
|
||||
|
|
0 |
; t |
|
|
|
|
0 |
|
; |
|
|
|
|
|
0 |
|
|
|||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
f |
|
|
|
2 f |
|
|
|
|
c |
|
2 F f |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
R |
|
|
c |
F 0 ; |
mR |
|
|
c |
|
|
; R m F 0 , |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
4 f F |
|
4 f |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
F |
|
|
|
|||||||||
Период модуляции TM выбирается достаточно большим, чтобы при любых дальностях выполнялось соотношение TMtR. Тогда зоны обращения будут пренебрежимо малы и можно считать, что средняя разностная частота за период TM равна FP0: FPсрFP0. При этом задача измерения дальности сведётся к измерению FPср. На выходе фильтра разностной частоты колебания UP(t) (рис.д) с помощью формирователя импульсов превращаются в последовательность импульсов (рис. в), средняя частота которых определяется частотомером. Такой метод измерения частоты называют методом "счёта нулей", так как стандартный импульс формируется каждый раз при переходе через нуль напряжения UP(t) снизу-вверх. Индикатор показывает измеренную дальность с учётом масштабного коэффициента mR
25. Фазовый метод измерения дальности.
Рассмотрим сначала идеализированный случай. В свободном пространстве имеется один единственный отражатель и фазовая РЛС. Передатчик излучает синусоидальное немодулированное колебание частоты f0 с текущей фазой
прд = 2 f0t +
Сигнал отражается от цели А (или ретранслируется ответчиком цели и поступает в приёмник с фазой
прм = 2 f0 (t - tR) + + ,
где - сдвиг фазы при отражении от цели
В дальнейшем мы будем полагать его известным и учтённым в начальной градуировке Главное свойство отражённого сигнала, используемое в
измерениях, - его запаздывание относительно зондирующего на время tR в пути до цели А и обратно
tR = 2 R с
Передаваемое и принимаемое колебания поступают на фазометр ФМ, измеряющий разность между ними
прд - прм 2 f0 tR - = (4 f0R с) - .

Отбрасывая , учтённое в градуировке, получаем объектов, что приводит к различию амплитуд уравнение 4 f0 R с = 4 R , связывающее отражённых сигналов, поступающих на вход измеряемую разность фаз с интересующим нас приёмника РЛС, которое вызывает различную яркость
параметром - дальностью R . Зависимость = f (R) – свечения отдельных элементов экрана, что позволяет линейна. Это прямая, проходящая через начало судить о характере облучаемых объектов.
координат с крутизной 4
Электронно – лучевой фазометр имеет кольцевую |
|
|
|
|
|
|
|
|
||||
развёртку, которая |
создаётся с |
помощью опорного |
|
|
|
|
|
|
|
|
||
(передаваемого) |
синусоидального |
напряжения, |
|
|
|
|
|
|
|
|
||
разделяемого с помощью фазового сдвига ( 2 ) на два |
|
|
|
|
|
|
|
|
||||
ортогональных, подаваемых на две пары отклоняющих |
|
|
|
|
|
|
|
|
||||
пластин. Таким образом, на 360 экрана приходится |
|
|
|
|
|
|
|
|
||||
360 фазового сдвига, что соответствует расстоянию / |
|
|
|
|
|
|
|
|
||||
2. С помощью ограничителя, дифференцирующей цепи |
|
|
|
|
|
|
|
|
||||
и нормализатора создаются импульсы 3 и 4, |
|
|
|
|
|
|
|
|
||||
соответствующие |
переходам |
через |
нуль |
(в |
|
|
|
|
|
|
|
|
положительном направлении) опорного и отражённого |
|
|
|
|
|
|
|
|
||||
синусоидальных |
колебаний. |
Сумма |
5 |
|
|
|
|
|
|
|
|
|
последовательностей импульсов 3 и 4 подаётся на |
|
|
|
|
|
|
|
|
||||
подсвет луча. При этом импульсы 3 создают яркую |
|
|
|
|
|
|
|
|
||||
точку – нуль дальности, а 4 – |
позволяют измерять |
На |
индикаторе |
|
получается |
|
непрерывная |
|||||
|
|
|
|
|
|
|
||||||
дальность. |
|
|
|
|
радиолокационная карты земной поверхности в |
|||||||
|
|
|
|
|
||||||||
|
|
|
|
|
пределах азимутальных углов ±100° впереди самолета, |
|||||||
|
|
|
|
|
заданная в полярных координатах "азимут-дальность". |
|||||||
|
|
|
|
|
Экран индикатора имеет время послесвечения |
|||||||
|
|
|
|
|
несколько большее времени цикла качания антенны |
|||||||
|
|
|
|
|
РЛС, что позволяет наблюдать общую картину |
|||||||
|
|
|
|
|
просматриваемой местности. |
|
|
|||||
|
|
|
|
|
Первые отражённые сигналы приходят с дальности, |
|||||||
|
|
|
|
|
равной высоте полёта, поэтому около центра экрана |
|||||||
|
|
|
|
|
образуется |
тёмное |
|
пятно |
с |
радиусом, |
||
|
|
|
|
|
пропорциональным высоте полёта самолёта. Затем |
|||||||
|
|
|
|
|
экран засвечивается сигналом, отражённым от |
|||||||
|
|
|
|
|
различных |
объектов. |
Для |
|
правильности |
|||
|
|
|
|
|
воспроизведения |
обстановки |
на |
индикаторе |
||||
|
|
|
|
|
необходимо, чтобы одинаковые объекты давали на |
|||||||
|
|
|
|
|
экране одинаковую яркость засвета независимо от |
|||||||
|
|
|
|
|
различия расстояний до каждого из них. |
|
||||||
|
|
|
|
|
При работе РЛС на развёртках "30", "50" и "125" обзор |
|||||||
|
|
|
|
|
земной |
поверхности |
осуществляется |
косекансной |
||||
|
|
|
|
|
веерной диаграммой направленности. |
|
|
|||||
26.РЛС “Гроза”, режим “Земля”
Изображение местности на экране индикатора получается в результате различных значений эффективной отражающей поверхности наземных
H |
|
R sin |
H cos ec |
Для получения такой диаграммы в этом режиме используется антенный отражатель (рефлектор) двойной кривизны.
Вцелях повышения дальностей наблюдения угол не равен курсу, и самолёт перемещается в
используются поочерёдно два вида диаграмм |
заданном направлении «боком». |
|
|
|
|||||
направленности: при работе на развёртке "375" обзор |
Будем рассматривать горизонтальный полёт и для |
||||||||
поверхности осуществляется узким лучом, который простоты считать |
луч антенны бесконечно узким, |
||||||||
имеет в два раза больший коэффициент направленного |
направленным в точку А земной поверхности. |
||||||||
действия. |
|
|
2W |
cos |
2W |
cos( |
|
|
|
|
F |
П |
П |
|
) |
, |
|||
|
|
|
c |
||||||
|
Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
27. |
Назначение ДИСС. |
|
Спектр допплеровских |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||
частот. Принцип оценки угла сноса |
|
|
|
|
|
|
|
|
|||||
Для решения различных задач навигации летательных |
|
|
|
|
|||||||||
аппаратов (ЛА) необходимо знать величину и |
|
|
|
|
|||||||||
направление |
вектора |
скорости |
относительно |
|
|
|
|
||||||
поверхности Земли. Зная скорость и направление |
|
|
|
|
|||||||||
движения, можно управлять полётом ЛА. Кроме того, |
|
|
|
|
|||||||||
путём интегрирования составляющих вектора скорости |
|
|
|
|
|||||||||
в заданной системе координат можно |
|
определить |
|
|
|
|
|||||||
текущие координаты ЛА. |
|
|
|
|
|
|
|
|
|
|
|
||
Для определения вектора скорости ЛА широко |
|
|
|
|
|||||||||
применяется радиоаппаратура, использующая эффект |
|
|
|
|
|||||||||
Допплера. Обычно полёт происходит на постоянной |
|
|
|
|
|||||||||
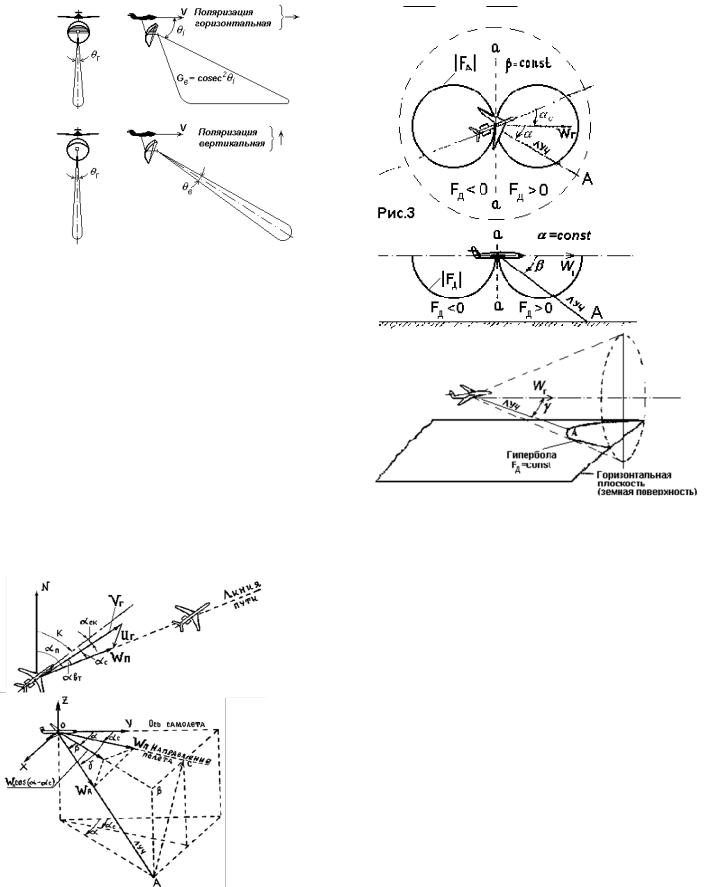
высоте, при этом вертикальная составляющая скорости |
Мысленно вращаем луч вокруг вектора WП . При таком |
||||||||||||
равна |
нулю. В |
этом случае |
необходимо |
определять |
|||||||||
только |
две составляющие |
|
вектора |
скорости в |
вращении луч образует поверхность конуса, ось |
||||||||
|
которого совпадает с WП На земной поверхности он |
||||||||||||
горизонтальной |
плоскости |
или |
|
величину |
|||||||||
|
прочертит |
некоторую кривую равных допплеровских |
|||||||||||
горизонтальной скорости и угол сноса. |
|
|
|
||||||||||
|
|
|
частот. Эта кривая будет являться гиперболой, |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
поскольку она образуется как линия пересечения |
|||
|
|
|
|
|
|
|
|
|
|
конуса и плоскости (горизонтальной), параллельной |
|||
|
|
|
|
|
|
|
|
|
|
оси конуса. Полученную гиперболу называют |
|||
|
|
|
|
|
|
|
|
|
|
изодопплеровской, так как она проходит через точки |
|||
|
|
|
|
|
|
|
|
|
|
земной |
поверхности, |
которым |
соответствует |
|
|
|
|
|
|
|
|
|
|
постоянная частота Допплера при отражении сигналов. |
|||
При полёте самолёта направление движения обычно не совпадает с направлением продольной оси, т.е. путевой