

Базовые средства матпакета Scilab
.pdfxopt – вектор аргументов, обеспечивших оптимальное значение функции;
gopt – градиент целевой функции (или производной в случае одномерной оптимизации) в точке xopt;
work – рабочий массив перезапуска для Квази-Ньютоновских методов. iters – скаляр, число итераций, которое отображается при iprint=2. evals – скаляр, число вычислений функции cost, которое отображается
при iprint=2.
– скаляр, индикатор завершения, может иметь следующие
err=1 – норма вычисленного градиента ниже допустимого;
err=2 – на последней итерации f уменьшается;
err=3 – оптимизация останавливается из-за слишком малых
изменений для X;
err=4 – остановка: максимальное количество обращений к f;
err=5 – остановка: максимальное количество итераций;
err=6 – остановка: слишком маленькие изменения в
направлении градиента;
err=7 – остановка: во время расчета направления спуска;
err=8 – остановка: во время расчета оценки матрицы Гессе;
err=9 – окончание оптимизации, успешное завершение;
err=10 – успешное окончание оптимизации (линейный поиск
не выполняется).
Каждый алгоритм, реализованный в optim, имеет свои собственные критерии завершения, которые могут использовать параметры, полученные от пользователя, такие как: nap, iter, epsg, epsf и epsx.
Рассмотрим пример использования решателя optim для случая решения задачи оптимизации одномерной функции f(x)=x4+3x3-13x2-6x+26, имеющей на отрезке [-4;-2] единственный минимум (исследование которой приведено выше на рис. 2.7.1-2 и 2.7.1-3), выбрав в качестве начальной точки х0=-3 (рис. 2.7.3-1). В нашем случае используется достаточно простой формат функции optim – передается имя вспомогательной функции (costf) и начальное значение аргумента (х0), а в качестве выходных параметров выступают координаты точки минимума функции f(х).
 271
271 

-->// Нахождение координат точки минимума с использованием решателяoptim
--> -->exec('РИС2731.sce'); -->x0 = -3;
--> // Вычисление координат точки минимума
--> [fmin, xmin] = optim(costf, x0); // Обращение к функции optim --> disp([fmin, xmin])
-95.089413 -3.8407084
Рис. 2.7.3-1. Нахождение координат точки минимума функции f(x)с использованием решателя optim
В примере, приведенном на рис. 2.7.3-1 для вычисления производной используется функция numderivative, что позволяет устранить проблему получения аналитических выражений производных в случае сложного выражения целевой функции. Однако использовать эту функцию совсем необязательно. Так, например, на рис. 2.7.3-2 приведен сценарий, в котором для вычисления значений производной используется аналитическое выражение.
Рис. 2.7.3-2. Вычисление производной с использованием ее математического выражения
 272
272 
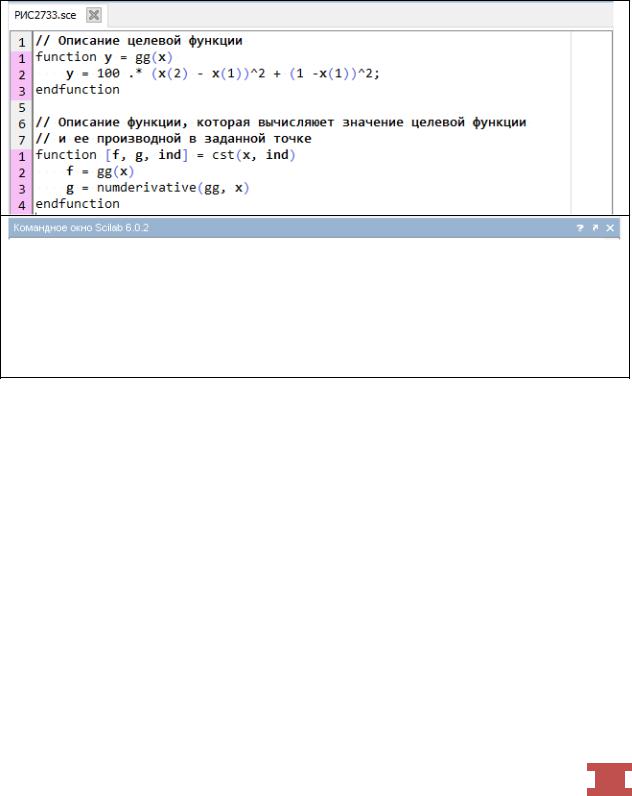
В следующем примере (рис.2.7.3-3) определим координаты точки минимума и значение многомерной функции Розенброка:
f(x1,x2)=100(x2-x12)2+(1-x1)2,
с использованием того же упрощенного формата функции optim. Ранее (рис.2.7.1-4) в качестве начального приближения уже был выбран вектор начальных значений [0,0].
--> // Нахождение минимума многомерной функции f(x1,x2)
-->
-->exec('РИС2733.sce', 0);
-->x0 = [0; 0]; // Начальныезначения
--> [f, |
xopt] = optim(cst, x0); |
// Обращение к функции optim |
disp(f, [xopt']); |
|
|
1. |
1. |
|
.083D-30 |
|
|
Рис. 2.7.3-3. Использование функции optim для нахождения координат точки минимума многомерной функции f(x1,x2)
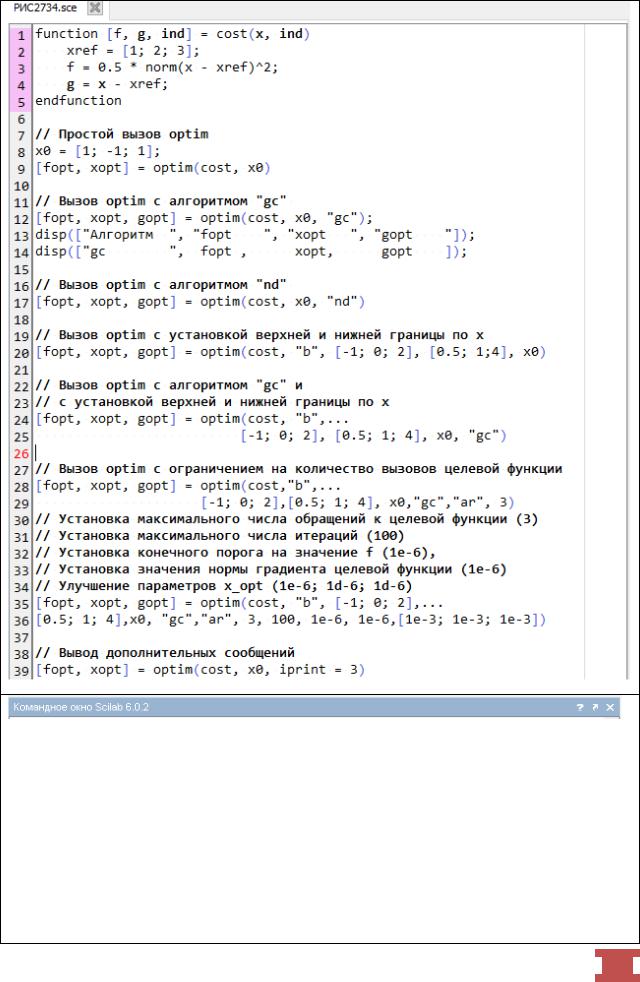
Отметим, что в описанных выше примерах были использованы самые простые форматы функции optim. Однако в процессе вычислений часто представляет интерес: сколько итераций потребовалось для нахождения минимума той или иной функции, причину прекращения итерационного процесса и многие другие моменты, которые могут быть выявлены при использовании других, описанных выше, форматов этой функции.
Именно поэтому пользователю, решающему серьезные задачи оптимизации крайне важно рассмотреть и проанализировать результаты выполнения следующего примера (рис. 2.7.3.4), показывающего возможности использования различных (необязательных) параметров функции optim.
 273
273 
--> // Загрузка сценария РИС2734
--> // и обращение к решателю optim с дополнительными параметрами
--> //
--> // exec('РИС2734.sce', 0) |
|
|
Xopt = |
1.2.3.; fopt=0.; |
gopt= 0.0.0. |
Xopt = |
1. 2. 3.; fopt=0.;gopt= |
0.-1.776D-14-1.199D-14 |
xopt=1. 2. 3.; fopt=2.297D-28; gopt=-0.5-1.0. |
||
xopt=0.5 1.3.;fopt=0.625; |
gopt=-0.5 -1. 0. |
|
xopt=0.5 1. 3.;fopt=0.625; gopt=-0.5 -1.5559108 -0.7779554
xopt=0.5 1. 2.2220446 fopt=1.6380365 gopt=-0.5 -1.8308232 -0.9154116 xopt=0.5 1. 2.0845884 fopt=2.2199459
***** enters -qn code- (without bound cstr)
dimension=3, epsq=0.2220446049250313E-15, verbosity level: iprint=3
 274
274 

max number of iterations allowed: iter=100 |
|||||
max number of calls to costf allowed: nap=100 |
|||||
------------------------------------------------ |
|||||
iter num |
|
1, nb calls=1, f=6.500 |
|||
linear search: initial derivative=-3.606 |
|||||
|
|
|
step length=0.1000E-01, df=-0.4261, derivative=-3.485 |
||
|
|
|
step length=0.1000, df=-3.611, derivative=-2.404 |
||
iter num |
|
2, nb calls=3, f=2.889 |
|||
linear search: initial derivative=-2.404 |
|||||
|
|
|
step length=1.000,df=-2.889,derivative=0.3695E-15 |
||
iter num |
|
3, nb calls=4, f=0.9861E-30 |
|||
linear search: initial derivative=-0.1380E-14 |
|||||
|
|
|
step length=1.000,df=0.4142E-29, derivative=0.3192E-14 |
||
|
|
|
step length=0.2996,df=-0.9861E-30,derivative=0.0000E+00 |
||
iter num |
|
4, nb calls=6, f=0.0000E+00 |
|||
***** leaves -qn code-, gradient norm=0.0000000000000000E+00 |
|||||
optim: Норма проектируемого градиента ниже, чем 0. |
|||||
xopt=1.2.3.fopt=0. |
|
|
|||
x0 = |
|
1. |
-1. |
1. |
|
xopt = |
|
1. |
2. |
3. |
|
fopt = 0. |
|
|
|
||
gopt = |
|
0. |
0. |
0. |
|
xopt = |
|
1. |
2. |
3. |
|
fopt |
= |
0. |
|
|
|
gopt |
= |
0. -1.776D-14 -1.199D-14 |
|||
xopt |
= |
1. |
2. |
3. |
|
fopt |
= |
2.297D-28 |
|
||
gopt |
= -0.5 -1. 0. |
|
|||
xopt |
= |
0.5 |
1. |
3. |
|
fopt |
= |
0.625 |
|
|
|
gopt |
= -0.5 |
-1. |
0. |
|
|
xopt |
= |
0.5 |
1. |
3. |
|
fopt |
= |
0.625 |
|
|
|
gopt |
= -0.5 |
-1.5559108 |
-0.7779554 |
||
xopt |
= |
0.5 |
1. |
2.2220446 |
|
fopt |
= |
1.6380365 |
|
|
|
gopt |
= -0.5 |
-1.8308232 |
-0.9154116 |
||
xopt |
= |
0.5 1. |
2.0845884 |
||
fopt |
= |
2.2199459 |
|
|
|
***** enters -qn code- (without bound cstr) |
|
|
|
|
|
|
|||
dimension= |
3, epsq= |
0.2220446049250313E-15, verbosity level: iprint= |
|||||||
3 |
|
|
|
|
|
|
|
|
|
max number of iterations allowed: iter= |
|
100 |
|
|
|
|
|
||
max number of calls to costf allowed: nap= |
100 |
|
|
|
|
|
|||
------------------------------------------------ |
|
|
|
|
|
||||
iter num |
1, nb calls= |
1, f= 6.500 |
|
|
|
|
|
|
|
linear search: initial derivative= -3.606 |
|
|
|
|
|
|
|||
|
step length= 0.1000E-01, df=-0.4261 |
, derivative= -3.485 |
|||||||
|
step length= 0.1000 |
, df= -3.611 |
, derivative= -2.404 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
275 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iter num |
2, |
nb calls= |
3, f= 2.889 |
linear search: initial derivative= -2.404 |
|||
|
|
step length= |
1.000, df= -2.889, derivative= 0.3695E-15 |
iter num |
3, nb calls= |
4, f= 0.9861E-30 |
|
linear search: initial derivative=-0.1380E-14 |
|||
|
|
step length= |
1.000, df= 0.4142E-29, derivative= 0.3192E-14 |
|
|
step length= 0.2996, df=-0.9861E-30, derivative= 0.0000E+00 |
|
iter num |
4, nb calls= |
6, f= 0.0000E+00 |
|
***** leaves -qn code-, gradient norm= 0.0000000000000000E+00 optim: Норма проектируемого градиента ниже, чем 0.
xopt = 1. 2. 3. fopt = 0.
Рис. 2.7.3-4. Применение дополнительных параметров при использовании функции optim
Решатель fminsearch
Решатель fminsearch – вычисляет безусловный минимум функции по алгоритму Нелдера-Мида и имеет следующие форматы [13]:
X=fminsearch(costf,х0) X=fminsearch(costf,х0,options) [X,fval]=fminsearch(costf,х0,options) [X,fval,exitflag]=fminsearch(costf,х0,options)
[X,fval,exitflag,output]=fminsearch(costf,х0,options)
Этот решатель является алгоритмом прямого поиска, не использующим производную целевой функции, а основан на обновлении симплекса, который является набором k>=n+1 вершин, где каждая вершина связана с одной точкой и одним значением функции. Алгоритм создан на базе neldermead компонент [13].
Рассмотрим подробнее назначение параметров:
Входные параметры:
сostf – внешняя функция, которая возвращает значение целевой функции и имеет следующий заголовок
где X– текущая точка;
f – значение целевой функции;
X0 – матрица начальных значений;
options – структура данных, содержащая настраиваемые параметры алгоритма оптимизации, значения которых и определяют
конфигурацию алгоритма fminsearch, причем fminsearch чувствительна к следующим опциям:
options.MaxIter – максимальное количество итераций, значение по умолчанию – 200*n, где n- количество переменных;
 276
276 

options.MaxFunEvals – максимальное количество оценок функции затрат, значение по умолчанию – 200*n, где n – количество переменных;
options.TolFun – абсолютный допуск по значению функции, значение которого по умолчанию – 1.e-4;
options.TolX – абсолютный допуск на размер симплекса, значение по умолчанию – 1.e-4;
options.Display – подробный уровень, для которого возможны значения: "notify","iter","final" или "off", значение по умолчанию –
"notify";
options.OutputFcn – выходная функция или список выходных функций;
options.PlotFcns – функция печати или список функций печати.
Выходные параметры:
X – значение аргумента, обеспечившее минимальное значение функции;
fval– минимальное значение функции.
– флаг, связанный со статусом выполнения алгоритма:
– максимальное количество итераций достигнуто;
0– максимальное число оценок функций достигнуто;
1– допуск на размер симплекса и его изменения уже достигнут: алгоритм не имеет сходимости;
output – структура |
данных, |
которая хранит информацию о |
выходных данных и содержит следующие поля: |
||
output.algorithm – |
строка, |
содержащая название алгоритма, |
то есть алгоритма Нелдера-Мида; |
|
|
output.funcCount – количество оценок функции; output.iterations – количество итераций;
output.message – строка, содержащая сообщение о завершении.
Критерии прекращения процесса оптимизации используют следующие переменные:
ssize – текущий размер симплекса;
shiftfv – абсолютное значение разности значения функции между самой высокой и самой низкой вершиной.
Процесс итерации останавливается, если выполняются следующие
условия: ssize<options.TolFun&shiftfv<options.TolFun.
Алгоритм, заложенный в fminsearch использует специальный начальный симплекс, который вычисляется эвристически в зависимости от начального предположения (подробнее см. в документации о optimsimplex
[x]) .
В следующих примерах для вычисления минимума функции Розенброка воспользуемся решателем fminsearch, описав предварительно
 277
277 
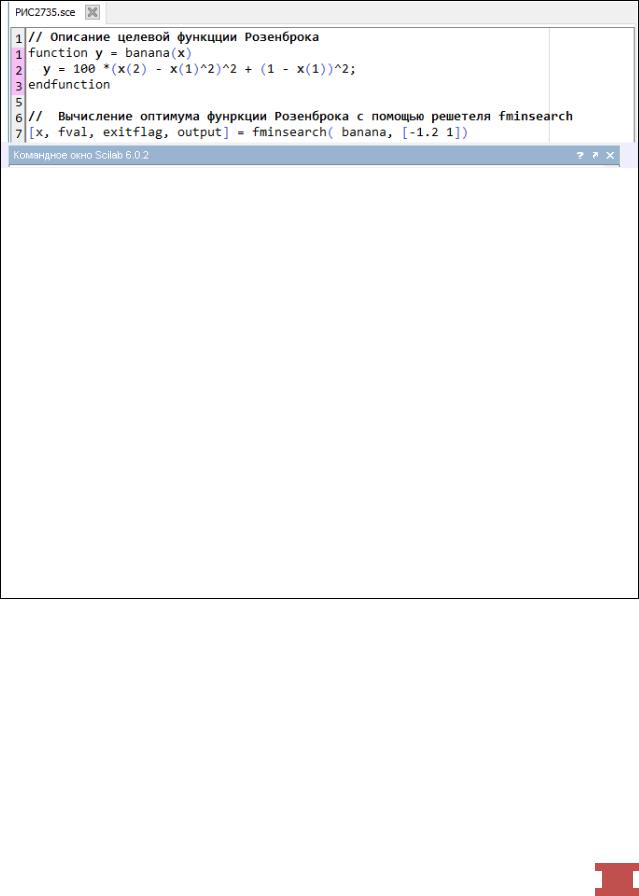
функцию под именем banana, и задав начальные значения поиска [-1.2 1.0]. В данном случае для поиска минимума потребовалось выполнение 85 итераций и 159 обращений к функции оценки (рис. 2.7.3-5).
--> // Загрузка сценария РИС2735
--> // и вычисление минимума с использованием решателя fminsearch
-->
--> exec('РИС2735.sce', 0)
[output.Output, output.funcCount, output.iterations, output.message] exitflag =
1. fval =
0.00000000081776611 x =
1.0000220217835567 1.0000422197517711
--> mprintf('algorithm = %c\nfuncCount = %4d\niterations = %3d',… output.algorithm, output.funcCount, output.iterations);
algorithm = Nelder-Mead simplex direct search funcCount = 159
iterations = 85 --> output.message ans =
!Optimization terminated:
!
! the current x satisfies the termination criteria using OPTIONS.TolX of 0.0001 ! and F(X) satisfies the convergence criteria using OPTIONS.TolFun of 0.0001 !
Рис. 2.7.3-5 Вычисление минимума функции Розенброка с использованием решателя fminsearch
Далее рассмотрим пример вычисление минимума функции Розенброка решателем fminsearch с настраиваемыми опциями. Настроим абсолютный допустимый размер симплекса до большего значения, так чтобы алгоритм выполнял меньшее количество итераций. Поскольку по умолчанию значение tolX=1.e-4, заменим его в optimset на большее значение, например, 1.e-2. В данном случае потребовалось 70итераций и 130обращений к функции оценки (рис. 2.7.3-6).
 278
278 
-->// Загрузка сценария РИС2735, настройка некоторых опций -->// и вычисление минимума с использованием решателяfminsearch
--> exec('РИС2736.sce', 0)
options =
Display: [0x0 constant] FunValCheck: [0x0 constant] MaxFunEvals: [0x0 constant] MaxIter: [0x0 constant] OutputFcn: [0x0 constant] PlotFcns: [0x0 constant] TolFun: [0x0 constant] TolX: [1x1 constant]
output =
algorithm: [1x1 string] funcCount: [1x1 constant] iterations: [1x1 constant] message: [3x1 string]
exitflag = 1.
fval = 0.0000085
x =
1.001016 1.0017605 -->
--> mprintf('algorithm = %c\nfuncCount = %4d\niterations = %3d',… output.algorithm, output.funcCount, output.iterations);
algorithm = Nelder-Mead simplex direct search funcCount = 130
iterations = 70 -->
--> output.message ans =
!Optimization terminated:
!
!the current x satisfies the termination criteria using OPTIONS.TolX of 0.01
!and F(X) satisfies the convergence criteria using OPTIONS.TolFun of 0.0001
Рис. 2.7.3-6. Вычисление минимума функции Розенброка решателем fminsearch с настраиваемыми опциями
 279
279 
Решатель nmplot
Кроме описанных выше решателей optim и fminsearch, в Scilab представляет интерес решатель nmplot [13], который использует алгоритмы оптимизации прямого поиска, при этом всю информацию о процессе оптимизации на каждой итерации можно отобразить на экране или сохранить в файлах для ее последующего анализа.
Решатель nmplot включает несколько методов оптимизации прямого поиска, основанных на симплексном методе. Он является модификацией компонента neldermead, с выводом результатов, и позволяет хранить историю значений данных в процессе итераций.
Этими данные могут быть:
значения координат симплекса;
значения функции, усредненные по вершинам;
минимальные значения функции в симплексе;
размеры симплекса.
Во время процесса оптимизации эти данные хранятся в нескольких файлах.
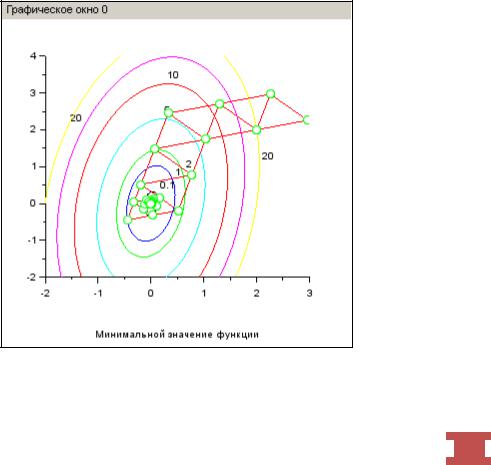
На рис. 2.7.3-7 приведен пример только графической траектории поиска минимума функции с использованием решателя nmplot. Подробноэтотпримериспользования решателя nmplot рассмотрен в [13]. Из которого следует, что выбор направления спуска определяется симплексом.
Рис. 2.7.3-7 Траектория спуска при поиске минимума с использованием решателя nmplot
 280
280 