Курсовой по ТММ
.doc
![]()
Министерство общего и профессионального образования РФ
Томский политехнический университет

Кафедра теоретической
и прикладной механики
Расчетно-пояснительная записка
к домашней работе
по Теории механизмов и машин
Выполнил: студент группы 4А15
Гусельников Ю.Н.
Принял: преподаватель
Скорых Н.В.
Томск 2003
Томский политехнический университет
Кафедра теоретической и прикладной механики
КУРСОВОЙ ПРОЕКТ ПО ТЕОРИИМЕХАНИЗМОВ И МАШИН
Студенту машиностроительного факультета, гр. 4А15
РЫЧАЖНЫЙ МЕХАНИЗМ
Кинематический анализ и силовой расчет механизма
Задание № 1
Схема механизма График силы полезного сопротивления

Исходные данные:
a |
b |
c |
|
|
|
|
мм |
||||||
400 |
1000 |
600 |
260 |
1000 |
400 |
900 |
Частота вращения кривошипа…………………………………![]() об/мин;
об/мин;
Сила полезного сопротивления
……………………………….![]() =1400
H;
=1400
H;
Коэффициент неравности хода…………………………………![]()
Дополнительные условия: Длина звена ВЕ определяется конструктивно
3
Структурный анализ механизма |
|||||||||||||||
Подвижные звенья |
Кинематические пары |
||||||||||||||
Схема |
Название |
Схема |
Название |
Степень подвиж-ности |
Символ |
||||||||||
|
Кривошип |
|
Враща- тельная низшая |
1 |
|
||||||||||
|
Шатун |
|
Враща- тельная низшая |
1 |
|
||||||||||
|
Кулиса (коромысло) |
|
Враща- тельная низшая |
1 |
|
||||||||||
|
Камень кулисы |
|
Враща- тельная низшая |
1 |
|
||||||||||
|
Ползун |
|
Поступа-тельная низшая |
1 |
|
||||||||||
|
|
|
Враща- тельная низшая |
1 |
|
||||||||||
|
|
|
Поступа-тельная низшая |
1 |
|
||||||||||
Число звеньев n=5 |
|
||||||||||||||
4 Структурный состав механизма |
|||||||||||||||
№ |
Схема |
Название |
Количество звеньев |
Количесто кинемати-ческих пар |
Формула строения |
||||||||||
1 |
|
Двухзвенная, двухповодковая группа Ассура II класса 4 вида W=32-23=0 |
2 |
3 |
[ |
||||||||||
2 |
|
Двухзвенная, двухповодковая группа Ассура II класса 1 вида W=32-23=0 |
2 |
3 |
[ |
||||||||||
3 |
|
Начальный механизм W=31-21=1 |
1 |
|
|
||||||||||
Формула строения механизма: -[ ] - [ ]
5 |
|||||||||||||||
Определение скоростей указанных точек звеньев и угловых скоростей звеньев для нулевого положения
Порядок построения плана скоростей:
Длина вектора скорости в т. А будет:
С другой стороны рассматривая звено 3,следует что
Так как звено 3 и 4 образуют вращательную кинематическую пару. Следовательно :
Найдем скорость
в точки D
Скорость найдем на основании св-ва подобия пропорциональности отрезков
Из плана получим:
|
|||||||||||||||
8.
Найдем угловую скорость
Определение скоростей указанных точек звеньев и угловых скоростей звеньев для второго положения
Порядок построения плана скоростей:
9.Найдем скорость
в т. А ведущего звена механизма, т.е.
точки звена, закон движения
которого задан. В данном случае это
постоянное вращательное движение
с частотой
; Длина вектора скорости в т. А будет:
Из плана получим:
7
15. Найдем скорость
т.
16. Найдем угловую скорость и звеньев 2 и 3:
=
=
8 |
|||||||||||||||
Определение линейных ускорений указанных точек и угловых ускорений звеньев для нулевого положения.
т.к.
Рассмотрим звено 2
Рассмотрим звено 3
Из плана найдем:
Из плана найдем:
Ускорение точки
Ускорение точки
9 |
|||||||||||||||
Найдем угловые ускорения
Определение линейных ускорений указанных точек и угловых ускорений звеньев для второго положения.
т.к. =const , то угловое ускорение
Рассмотрим звено 2
Рассмотрим звено 3
Из плана найдем:
Из плана найдем:
Из плана найдем:
10 Из плана получим:
13. Найдем ускорение
т.
Найдем угловые ускорения:
11
Силовой расчет механизма Целью силового расчета механизма является определение усилий в звеньях механизма, давление (реакции) в кинематических парах, величины уравновешивающего момента (силы) приложенного к ведущему звену. В результате силового анализа можно определить коэффициент полезного действия механизма, а также мощность, необходимую для его привода. Механизм содержит две структурные группы : группа 2-3 [ ] группа 4-5 [ ] Силы действующие на механизм Вес звеньев:
Ускорение центров масс:
Силы тяжести и силы инерции приложены в центрах масс звеньев,
т.е. в точках
Силы инерции звеньев:
Силы тяжести всегда направлены к центру земли, т.е. вертикально вниз. Силы инерции направлены противоположно ускорениям центров масс.
Главные моменты сил инерции:
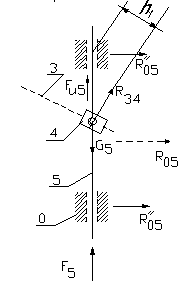
Силовой расчет группы 4-5: [ ]
Для пятого звена:
Силовой расчет группы 2-3: [ ]
Найдем сумму моментов сил на звено 2 относительно точки В:
Найдем сумму моментов сил на звено 3 относительно точки В:
Строим план сил в масштабе
Реакцию во внутреннем шарнире найдем из равновесия 2 звена:
Из плана сил находим: 13
Силовой расчет начального механизма 1-0:
Из плана сил
найдем:
14 |
|||||||||||||||
Рычаг Жуковского Н.Е.
=
=
Расхождение в методах:
15 |
|||||||||||||||
Определение КПД механизма
Коэффициент полезного действия является показателем степени совершенства механизма. Мгновенное значение КПД механизма определяется по формуле:
Мощности трения в кинематических парах:
16 |
|||||||||||||||
Список литературы
17
Содержание
скоростей звеньев для 0-го положения……………………………………...6
скоростей звеньев для 2-го положения……………………………………...7
ускорений звеньев для 0-го положения……………………………………..9
ускорений звеньев для 2-го положения……………………………………..10
2 |
|||||||||||||||
|
|||||||||||||||