


Полное ускорение по величине равно:
aD = 
 aDx2 + aDy2 =
aDx2 + aDy2 = 
 3,252 +1,52 ≈3,58(м / с).
3,252 +1,52 ≈3,58(м / с).
2.4 Движение твердого тела вокруг неподвижной точки и движение свободного твердого тела
2.4.1 Движение твердого тела, имеющего одну неподвижнуюточку
Примером движения тела с одной неподвижной точкой является вращение юлы (волчка), когда точка опоры неподвижна.
Для определения параметров, характеризующих положение твердого тела, вводим трехгранник Oxyz, жестко связанный с телом (рисунок 2.25). Точка О – неподвижная, и она одновременно является началом системы неподвижных координат Ox1y1z1.
|
Z |
|
Z1 |
|
|
|
|
|
|
|
Y |
|
|
O |
Y1 |
|
|
|
|
X1 |
|
|
X |
|
|
|
K |
Рисунок 2.25 – Углы, определяющие положение тела |
|||
Линия ОК пересечения плоскостей Оху и Ох1у1 называется линией узлов.
Положение тела полностью определяется углами:
ϕ = КОХ, ψ = Х1ОК, ϑ = Z1OZ.
Это углы Эйлера: ϕ − угол собственного вращения, ψ − угол
прецессии, ϑ − угол нутации.
Положение тела будет полностью определено, если известны зависимости
80
ϕ = f1 (t), ψ = f2(t), ϑ = f3 (t). |
(2.30) |
Эти зависимости и являются уравнениями движения твердого тела вокруг неподвижной точки. Таким образом, тело, вращающееся вокруг неподвижной точки, имеет три степени свободы.
Изменение угла ϕ приводит во вращение тело вокруг оси Оz (собственное вращение) с угловой скоростью
ω1 = dϕ/dt.
При изменении угла ψ происходит вращение вокруг оси Oz1; угловая скорость этого вращения
ω2 = dψ/dt.
При изменении ϑ происходит вращение вокруг линии узлов ОК (нутация); угловая скорость этого вращения
ω3 = dϑ/dt.
Векторы угловых скоростей ω1, ω2, ω3 направлены соответственно вдоль осей Oz, Oz1, OK (рисунок 2.26). В общем случае все три угла со временем меняются, поэтому тело вращается с некоторой угловой скоростью ω, равной геометрической сумме
ω = ω1+ ω2 + ω3.
Поскольку составляющие справа изменяются, то и слева величина угловой скорости изменяется, и поэтому она носит название мгновенной угловой скорости тела, а соответствующая ось ОР, вдоль которой направлен ее вектор, – мгновенной оси вращения. Она в общем случае меняет как направление в пространстве, так и положение внутри тела, проходя все время через неподвижную точкуО.
Z Z1 P

 2
2
 1
1 
O

 K3
K3
Рисунок 2.26 – Сложение угловых скоростей
81
В итоге движение твердого тела вокруг неподвижной точки слагается из серии последовательных элементарных поворотов вокруг мгновенных осей вращения, проходящих через эту точку.
Вектор
ε = dω/dt,
характеризующий изменение угловой скорости по направлению и по величине, называется мгновенным угловым ускорением.
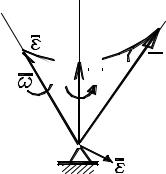
Вектор угловой скорости со временем меняется, и его конец описывает в пространстве некоторую траекторию – годограф (рисунок
2.27).
P P1 P2






 2
2 

 1
1
O 

Рисунок 2.27 – Сложение угловых ускорений
Скорость движения конца вектора ω вдоль этой траектории и есть угловое ускорение ε. Оно направлено вдоль касательной к этой траектории. Таким образом, в отличие от вращения тела вокруг неподвижной оси, в этом случае направления угловой скорости ω и углового ускорения ε не совпадают.
2.4.2 Общий случай движения свободного твердого тела
Движение АТТ полностью определится, если задать движение какойлибо его точки А, принятой за полюс, и положение «вмороженной в тело» системы координат:
x1A = f1(t), y1A = f2 (t), z1A |
= f3 |
(t), |
(2.31) |
||
ϕ = f4 (t), ψ = f5 (t), |
ϑ = f6 (t). |
||||
|
|||||
Первые три соотношения определяют движение полюса, вторые три – вращение тела вокруг этого полюса. Таким образом, в самом общем случае свободно движущееся тело твердое может иметь максимум шесть степеней свободы.
82