

3. Оптимизация параметров упруго-диссипативной связи динамических элементов гиросистемы.
На данном этапе предполагаем μα = μβ = 0 (поскольку они малы по сравнению с μ) и будем оптимизировать μ и С.
Тогда (при μα = μβ = 0)

Данная передаточная функция обладает следующим свойством: на АЧХ данной передаточной функции существуют две инвариантные точки (все АЧХ пересекаются в них). Положение этих точек на АЧХ изменяется при изменении С.
Целью задачи оптимизации, решаемой в данном пункте, является минимизация максимумов АЧХ ПФ системы, как объекта стабилизации, а именно минимизация резонансных пиков АЧХ. Оптимизация разбивается на две подзадачи:
1) Поиск значения С*, при котором инвариантные точки будут располагаться на одном уровне (при таком расположении обеспечивается минимальное значение амплитуды обеих инвариантных точек).
2) Поиск значения μ*, обеспечивающего минимальное значение резонансных пиков.
Приравниваем
 ,
получаем:
,
получаем:
W(jω)
=

Далее нужно найти такие две инвариантные точки, чтобы выполнялось равенство:

Устремляя μ–>0 а потом μ–>∞ получаем:


Подставляем числа из условия, раскрываем знак модуля и получаем систему уравнений:
которое решаем относительно ω с помощью пакета Mathcad 2001i. Получаем 8 решений:
Нулевые и отрицательные корни отбрасываем, и тогда получаем:

Далее находим оптимальное С*, пользуясь тем, что
 приμ
= 0
приμ
= 0
Также подставляем числа из условия, а также значения Ω1 и Ω2, раскрывая знак модуля получаем систему уравнений:

Решаем его относительно С в пакете Mathcad 2001i и получаем (отбрасывая комплексные корни):
С*≈ 5*105
Подставляем С* в выражения для Ω1 и Ω2 и находим их численные значения:
Ω1 ≈ 303.5 Гц
Ω2 ≈ 491.1 Гц
Далее, на основе найденного С* оптимизируем μ (находим μ*), для чего вначале нужно найти μ1*, μ2*, при которых в каждой из инвариантных точек будет экстремум АЧХ (это обеспечивает минимум “всплеска” АЧХ в соответствующих инвариантных точках) а для этого, в свою очередь, нужно решить систему уравнений:

Здесь в качестве ПФ W(jω) используем передаточную функцию стабилизации:

Здесь из первого уравнения находим μ1*, из второго – μ2*, получаем следующие решения (отбрасывая комплексные корни):

Находим μ*:

4. Ачх механической части гиросистемы с оптимальными параметрами μ* и с*.
ПФ механической части системы, как объекта стабилизации (берем из предыдущего пункта:

Строим
АЧХ механической части гиросистемы для
трех случаев (на одном графике):
 ,
, и
и
Для
 :
:

Для
 :
:

Для
 :
:

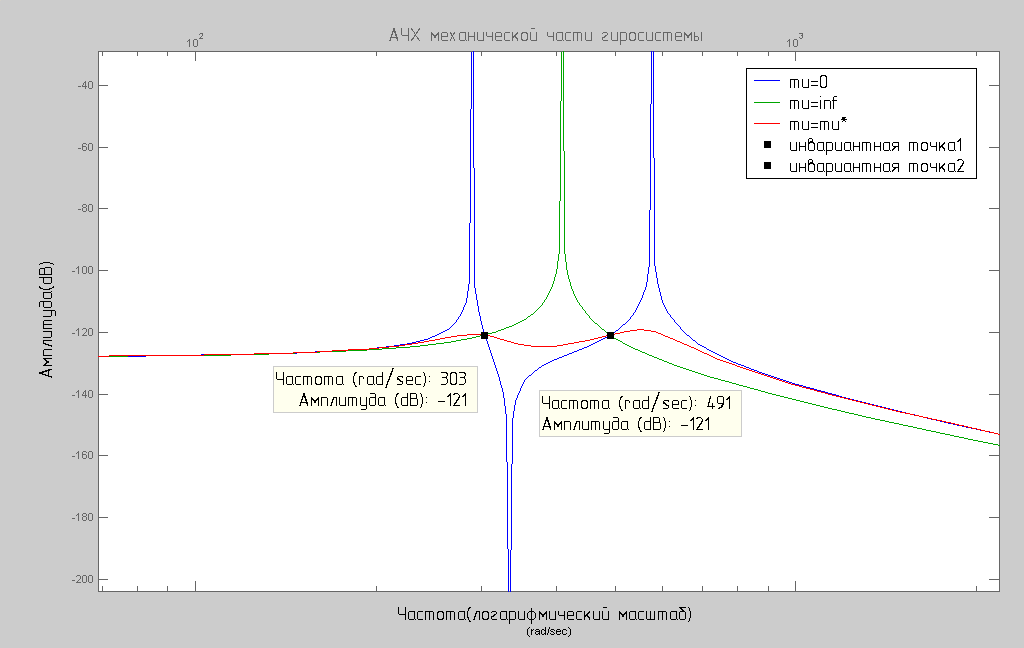
Рис. 2. АЧХ механической части гиросистемы.
Для каждой из трех АЧХ С = С*.
5. Синтез цепи обратной связи. Лчх разомкнутой цепи.
Определим требуемый статический коэффициент усиления в цепи обратной связи:
Далее построим ЛЧХ разомкнутой цепи (это нужно, поскольку в соответствии с критерием Найквиста-Михайлова мы судим об устойчивости замкнутой системы по устойчивости разомкнутой системы).
 –
передаточная функция гиросистемы как
объекта управления, здесь
–
передаточная функция гиросистемы как
объекта управления, здесь Подставляя
численные значения коэффициентов А1,
А2,
B,
H,
C
= C*,
μ
= μ*,
μα1,
μα2
и μβ,
получаем передаточную функцию разомкнутой
гиросистемы (знак “–”выносится
впоследствии за обратную связь, поэтому
здесь мы его не учитываем) :
Подставляя
численные значения коэффициентов А1,
А2,
B,
H,
C
= C*,
μ
= μ*,
μα1,
μα2
и μβ,
получаем передаточную функцию разомкнутой
гиросистемы (знак “–”выносится
впоследствии за обратную связь, поэтому
здесь мы его не учитываем) :

Строим ЛЧХ для данной передаточной функции.
Рис. 3. ЛАЧХ разомкнутой системы.
Видим, что замкнутая система неустойчива, то есть необходимо использовать корректирующий контур. Используем корректирующий контур в цепи обратной связи (К(р)) для достижения статической устойчивости и требуемого качества.
Система, как уже указано, неустойчива. Для ее стабилизации необходимо скорректировать форму ЛЧХ на средних частотах таким образом, чтобы амплитуда, при которой фазовая характеристика пересекает уровень -1800 была меньше 0Дб, и в то же время фаза, при которой амплитудная характеристика пересекает уровень 0Дб была больше -1800 (см. критерий устойчивости Найквиста-Михайлова).
Это можно достигнуть применением интегрирующего корректирующего устройства с передаточной функцией вида:

где
 .
.
Выберем следующие параметры корректирующего фильтра:




Построим ЛЧХ скорректированной системы, на одном графике с ней для сравнения также построим ЛЧХ нескорректированной системы, а также ЛЧХ корректирующего контура.
Видим, что с добавлением корректирующего контура система стала устойчивой со следующими параметрами запасов устойчивости:
1) По амплитуде: По амплитуде = 26.6дБ;
2) По фазе = 91.40.
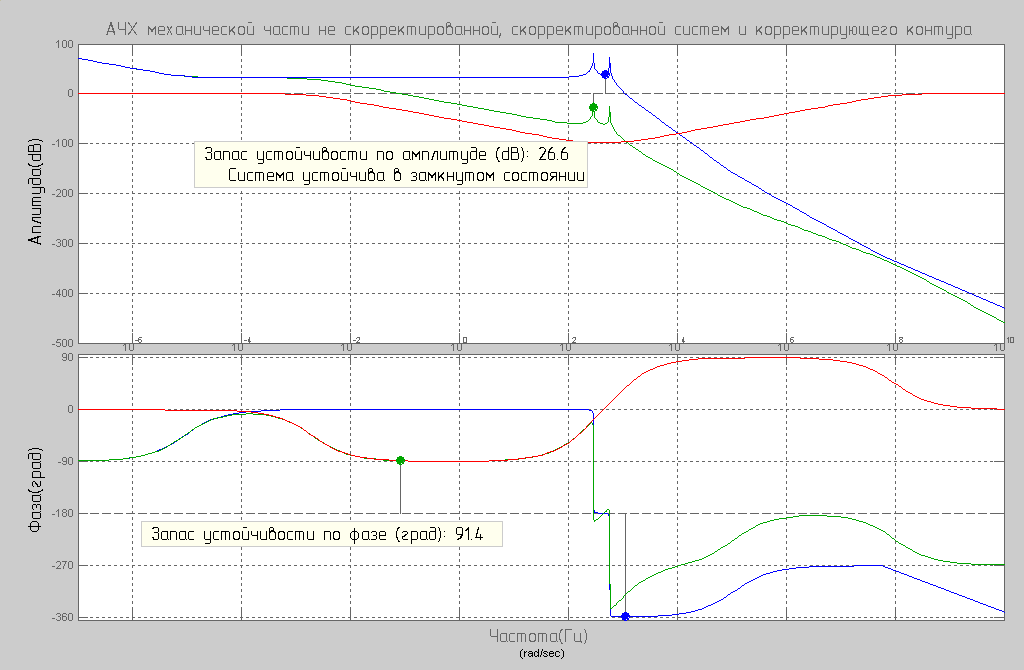
Рис. 4. ЛАЧХ не скорректированной разомкнутой системы (синий цвет); скорректированной разомкнутой системы (зеленый цвет) и корректирующего контура (красный цвет).
Приведем электрическую схему данного устройства:
Здесь
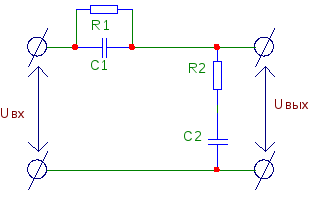


Решая данную систему относительно R2 и С2 получаем:


