

Датчики момента
В гироскопе установлены магнитоэлектрические датчики момента (рис. 2.7). Датчики по обеим осям имеют общий ротор, представляющий собой монолитный кольцевой магнит, входящий в состав маховика.
Статоры датчиков момента приклеены к латунной детали, закреплённой на корпусе, и служащей для отвода тепла от обмоток ДМ при работе гироскопа в условиях больших скоростей, т.е. при больших токах. Каждый из статоров датчика момента состоит из двух последовательно соединенных катушек основной (измерительной) обмотки и так же соединённых катушек вспомогательной обмотки. Основная обмотка используется в режиме измерения, а дополнительная задействуется при испытаниях.
Для регулировки крутизны датчиков момента служат прокладки между статором и латунной деталью.
На латунную деталь намотана катушка, являющаяся термодатчиком датчика момента.
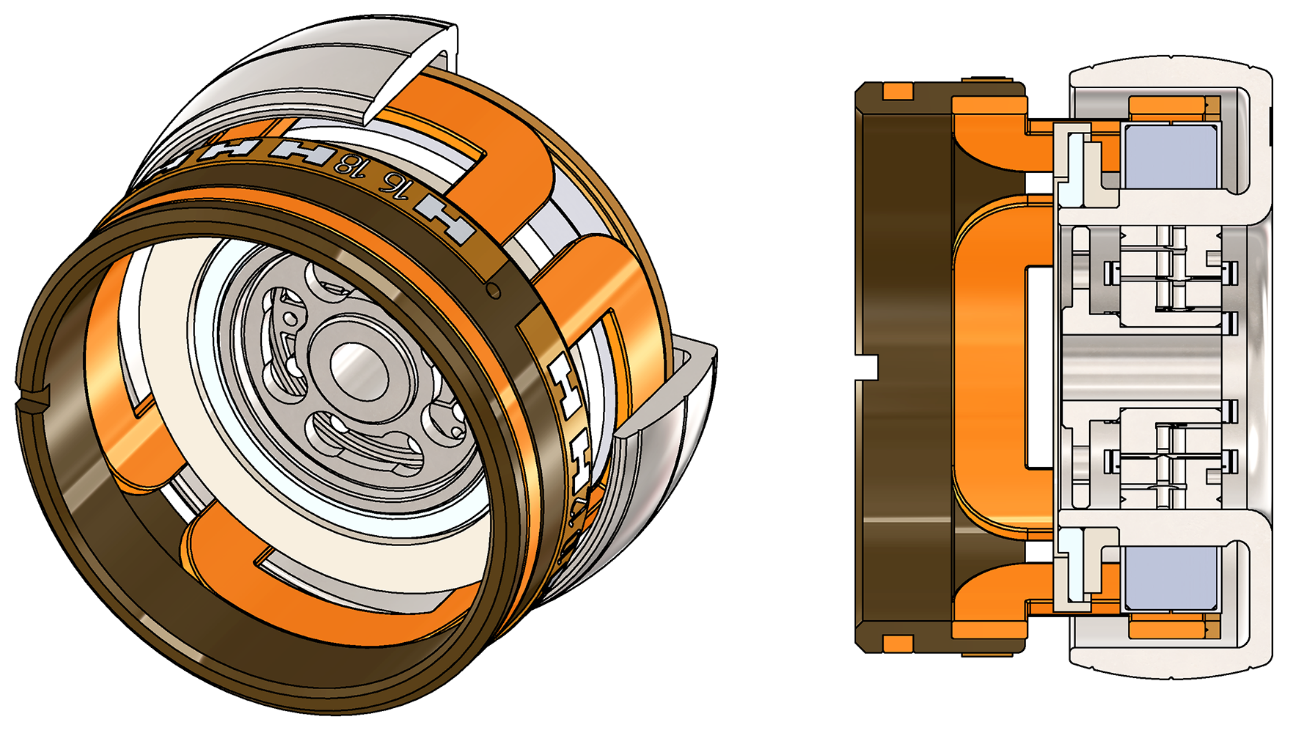
Рис. 2.7. Магнитоэлектрические датчики момента
Датчики угла
Для регистрации угла поворота маховика в гироскопе применены индуктивные датчики угла (рис. 2.8). Неподвижная (статорная) часть датчика угла представляет собой П-образный сердечник из металлокерамики, на который намотаны две одинаковые катушки, соединённые последовательно. ДУ по каждому из каналов содержит два таких сердечника с катушками, расположенные диаметрально. Датчики угла питаются напряжением 2,5 В частотой 32 кГц. Обмотки вместе с балансировочными резисторами образуют мостовую схему, съём выходного сигнала датчика угла осуществляется с её диагонали, образованной средними точками обмоток.
Статоры датчиков угла наклеены на корпус, кольцевой ротор – общий для всех датчиков – входит в состав маховика. Величина крутизны ДУ регулируется прокладкой между фланцем вала и маховиком.
При центральном положении маховика воздушные зазоры между ротором и сердечниками датчика угла равны, индуктивности обмоток одинаковы и мост сбалансирован. При наклоне маховика указанные воздушные зазоры изменяются: для одного сердечника воздушный зазор увеличивается, а для другого – уменьшается. При этом индуктивность одной обмотки уменьшается, а другой – увеличивается. В результате баланс моста нарушается и на выходной диагонали мостовой схемы появляется напряжение, пропорциональное углу поворота маховика. Изменение направления поворота маховика вызывает изменение фазы выходного напряжения на 180°, т. е. характеристика датчика угла является реверсивной.
Выбранные датчики угла не создают относительно измерительной оси момента сухого трения, т. к. являются бесконтактными, а моменты, обусловленные силами притяжения ротора к сердечникам, направлены в противоположные стороны и поэтому почти полностью взаимно компенсируются.
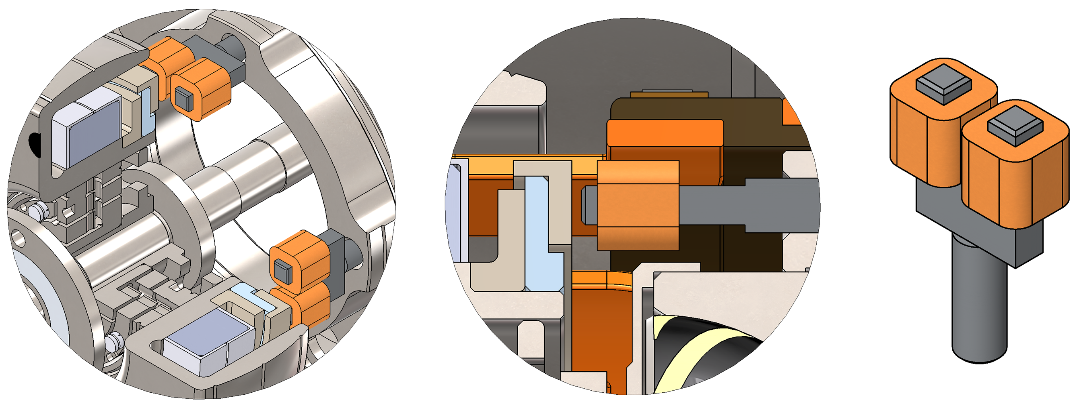
Рис. 2.8. Индуктивные датчики угла
Электрическая схема прибора кинд05-091
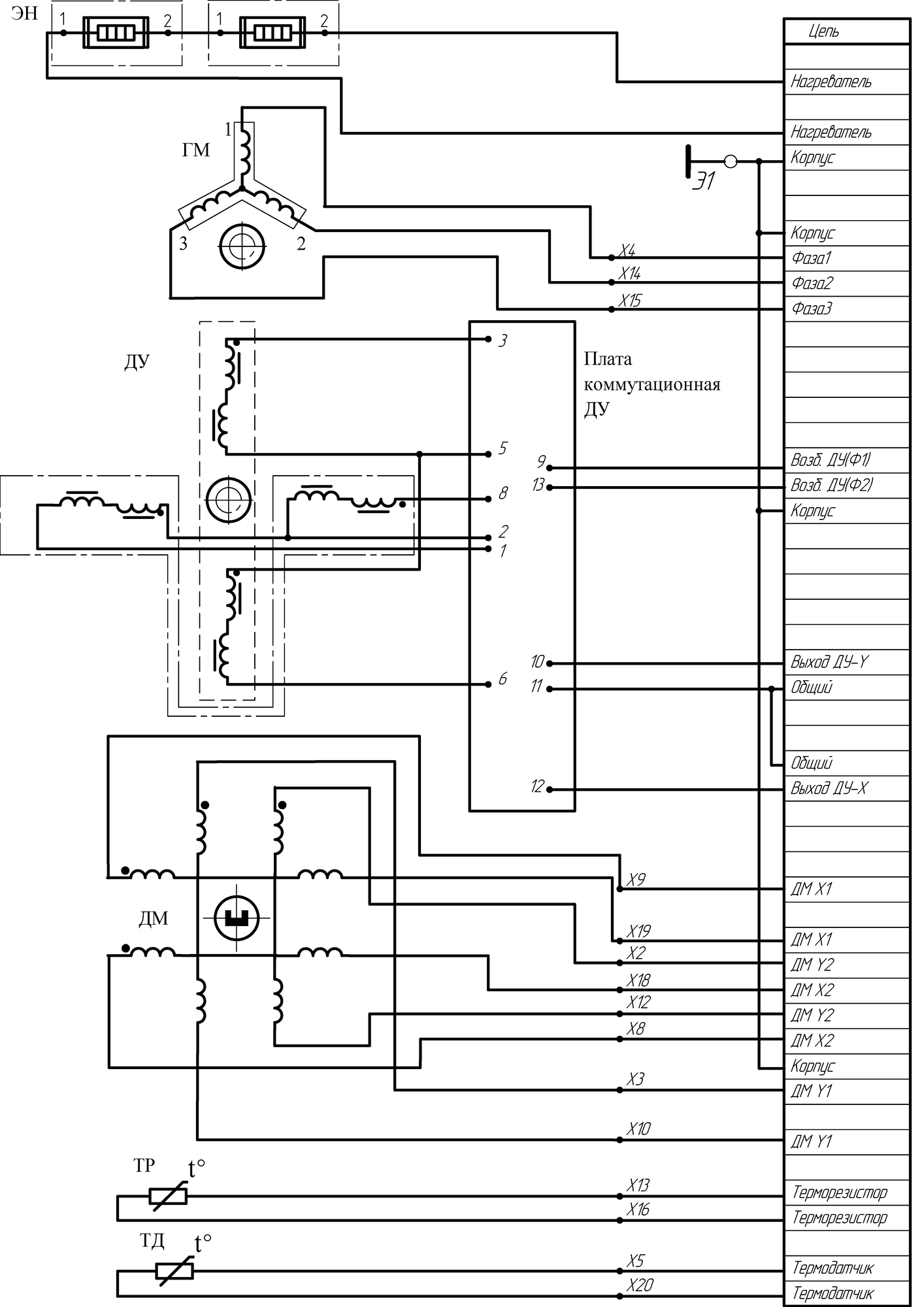
Рис. 2.9. Электрическая схема ДНГ (КИНД05-091)
2.3. Проверка достоверности твердотельной модели
Проведём сравнение некоторых массовых характеристик модели с характеристиками реального образца прибора КИНД05-091 (таблица 2.1).
Таблица 2.1. Сравнение характеристик модели и реального прибора
|
Параметр |
Значение из модели |
Реальное значение |
Расхождение, % |
|
Масса ДНГ, г |
130 |
125 |
4 |
|
Осевой момент инерции маховика, кг∙м2 |
1,36∙10-6 |
1,26∙10-6 |
9 |
|
Экваториальный момент инерции маховика, кг∙м2 |
7,74∙10-7 |
8,23∙10-7 |
5 |
Анализируя данные таблицы 2.1 можно сделать вывод, что твердотельная модель достаточно точно (с погрешностью, не превышающей 9%) описывает реальный образец прибора. Это обстоятельство позволяет использовать построенную модель для дальнейшего исследования.