

5.3. Проектирование эргономичного рабочего места программиста
Научно-технический прогресс, механизация и автоматизация различных технологических процессов повлекли за собой радикальное изменение характера труда человека. Он стал выступать в роли оператора, осуществляющего функции управления в системах «человек - машина - среда обитания» (ЧМСО). Уменьшились физические нагрузки на человека, улучшились условия его труда, снизилась возможность получения травмы. Однако это не сделало его работу полностью комфортной, а саму систему экологически безопасной, поскольку при этом существенное значение приобрели новые, так называемые психофизиологические вредные факторы. Существенно возросло значение психической деятельности человека и вместе с тем – необходимость совершенствования систем ЧМСО. Возник ряд проблем, важнейшей из которых стала проблема обеспечения безопасных, безаварийных, комфортных условий труда оператора, от которого существенным образом зависит надежность и эффективность работы всей системы.
Такие условия труда обеспечиваются в первую очередь правильной организацией рабочего места программиста с точки зрения эргономических требований.
Поскольку основную часть работы по управлению процессом испытаний программист производит при помощи персонального компьютера, целесообразно выбрать рабочую позу сидя, и при проектировании рабочего места исходить из требований, установленных в СанПин 2.2.2/2.4.1340-03 [1].
Конструкция ПЭВМ должна обеспечивать возможность поворота корпуса в горизонтальной и вертикальной плоскости с фиксацией в заданном положении для обеспечения фронтального наблюдения экрана видеодисплейного терминала (ВДТ). Дизайн ПЭВМ должен предусматривать окраску корпуса в спокойные мягкие тона с диффузным рассеиванием света. Корпус ПЭВМ, клавиатура и другие блоки и устройства ПЭВМ должны иметь матовую поверхность с коэффициентом отражения 0,4-0,6 и не иметь блестящих деталей, способных создавать блики.
Конструкция ВДТ должна предусматривать регулирование яркости и контрастности.
Помещения для эксплуатации ПЭВМ должны иметь естественное и искусственное освещение, соответствующее требованиям действующей нормативной документации.
Рабочий стол испытателя следует разместить таким образом, чтобы ВДТ был ориентирован боковой стороной к световым проёмам, и естественный свет падал преимущественно слева.
Площадь на одно рабочее место пользователей ПЭВМ с ВДТ на базе плоских дискретных экранов (жидкокристаллические, плазменные) должна составлять не менее 6 м2 [1]. Площадь рассматриваемого помещения – 12 м2.
Экран видеомонитора должен находиться от глаз пользователя на расстоянии 600-700 мм, но не ближе 500 мм с учетом размеров алфавитно-цифровых знаков и символов.
Конструкция рабочего стола должна обеспечивать оптимальное размещение на рабочей поверхности используемого оборудования с учетом его количества и конструктивных особенностей, характера выполняемой работы.
При этом допускается использование рабочих столов различных конструкций, отвечающих современным требованиям эргономики. Поверхность рабочего стола должна иметь коэффициент отражения 0,5 – 0,7.
Конструкция рабочего кресла должна обеспечивать поддержание рациональной рабочей позы при работе на ПЭВМ, позволять изменять позу с целью снижения статического напряжения мышц шейно-плечевой области и спины для предупреждения развития утомления.
Рабочее кресло должно быть подъёмно-поворотным, регулируемым по высоте и углам наклона сиденья и спинки, а также расстоянию спинки от переднего края сиденья, при этом регулировка каждого параметра должна быть независимой, легко осуществляемой и иметь надёжную фиксацию.
Поверхность сиденья, спинки и других элементов кресла должна быть полумягкой, с нескользящим, слабо электризующимся и воздухопроницаемым покрытием, обеспечивающим лёгкую очистку от загрязнений.
Высота рабочей поверхности стола должна регулироваться в пределах 680-800 мм, при отсутствии такой возможности высота рабочей поверхности стола должна составлять 725 мм.
Рабочий стол должен иметь пространство для ног высотой не менее 600 мм, шириной – не менее 500 мм, глубиной на уровне колен – не менее 450 мм и на уровне вытянутых ног – не менее 650 мм.
Конструкция рабочего кресла должна обеспечивать:
- ширину и глубину поверхности сиденья не менее 400 мм;
- поверхность сиденья с закругленным передним краем;
- регулировку высоты поверхности сиденья в пределах 400 – 550 мм и углам наклона вперед до 15 град., и назад до 5 град.;
- высоту опорной поверхности спинки 300±20 мм, ширину – не менее 380 мм и радиус кривизны горизонтальной плоскости – 400 мм;
- угол наклона спинки в вертикальной плоскости в пределах ±30 градусов;
- регулировку расстояния спинки от переднего края сиденья в пределах 260 – 400 мм;
- стационарные или съемные подлокотники длиной не менее 250 мм и шириной 50 – 70 мм;
- регулировка подлокотников по высоте над сиденьем в пределах 230±30 мм и внутреннего расстояния между подлокотниками в пределах 350 – 500 мм.
Рабочее место пользователя ПЭВМ следует оборудовать подставкой для ног, имеющей ширину не менее 300 мм, глубину не менее 400 мм, регулировку по высоте в пределах до 150 мм и по углу наклона опорной поверхности подставки до 20 градусов. Поверхность подставки должна быть рифленой и иметь по переднему краю бортик высотой 10 мм.
Клавиатуру следует располагать на поверхности стола на расстоянии 100 – 300 мм от края, обращённого к пользователю, или на специальной, регулируемой по высоте рабочей поверхности, отделенной от основной столешницы.
В соответствии с указанными требованиями спроектировано рабочее место инженера-программиста (см. схему рис. 5.1).
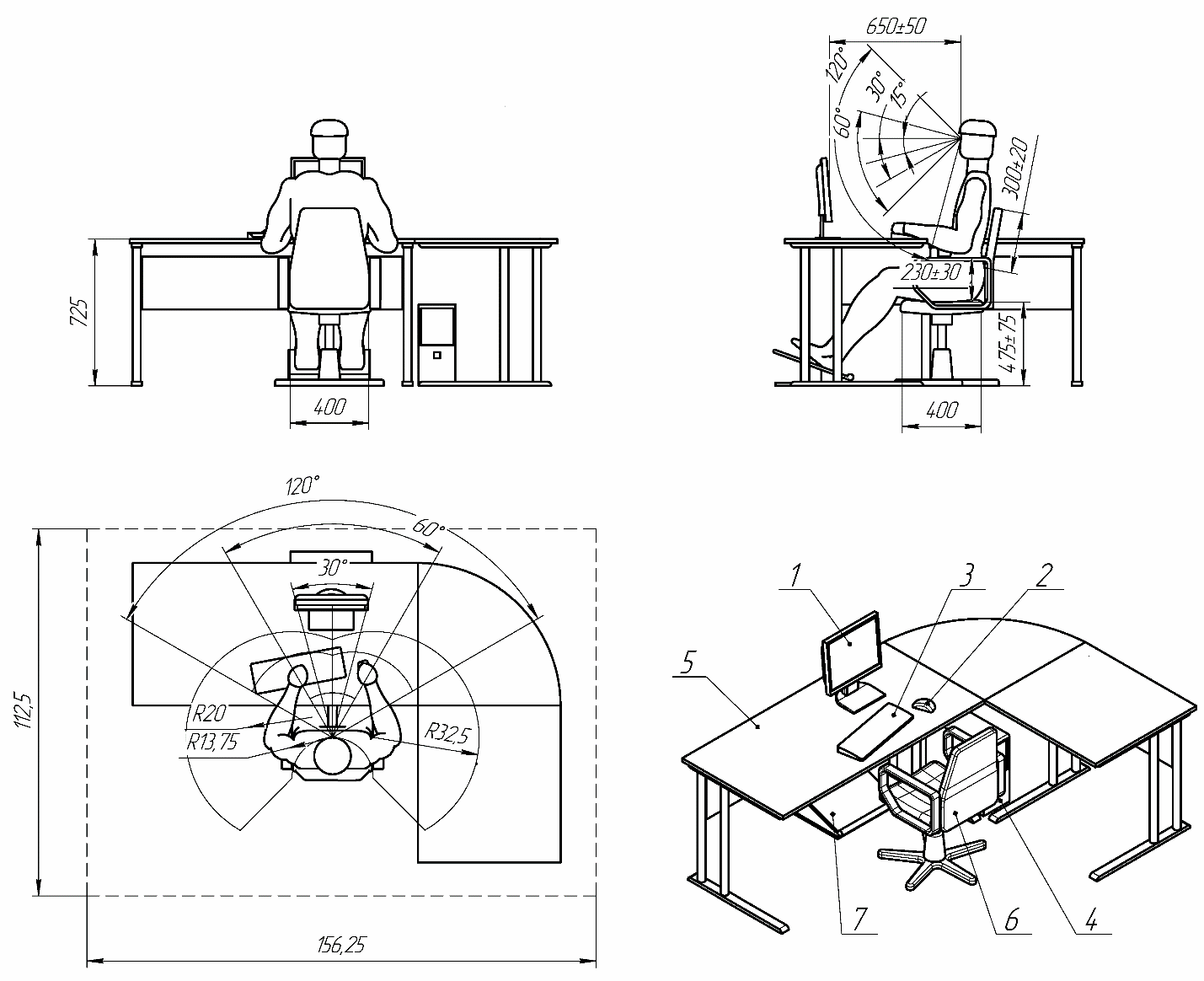
Рис. 5.1. Схема эргономичного рабочего места инженера-программиста
На рабочем столе 5 располагаются подключённые к компьютеру периферийные устройства: жидкокристаллический монитор 1, клавиатура 3, манипулятор-мышь 2, системный блок 4 находится под столом.
Программист в процессе работы находится в кресле 6. Для удобства он имеет возможность расположить ноги на подставке 7.
Зона досягаемости моторного поля указана на рис. 1 согласно ГОСТ 12.2.032-78 «Система стандартов безопасности труда. Рабочее место при выполнении работ сидя. Общие эргономические требования» [7]. При правильном расположении оборудования на рабочем столе органы управления компьютером находятся в зоне досягаемости программиста, и их использование не требует лишних усилий с его стороны.
Лица, работающие с ПЭВМ более 50% рабочего времени (профессионально связанные с ПЭВМ), должны проходить обязательный предварительный при поступлении на работу и периодический осмотр в установленном порядке.