

55 Червячные зубчатые передачи.
Червячной называется зубчатая передача, состоящая из двух подвижных звеньев – червяка и зубчатого колеса и предназначенная для передачи и преобразования вращательного движения между ортагональными перекрещивающимися осями. Червяком называют звено, наружная поверхность которого имеет форму винта. Червячным колесом называется зубчатое колесо с косыми зубьями, которое зацепляется с червяком.
Виды червячных передач и червяков.
Червячные передачи подразделяются:
1.по виду делительной поверхности червяка
а)цилиндрические червячные передачи – червяк и колесо в передаче имеют цилиндрические делительные и начальные поверхности;
б)глобоидные червячные передачи – делительная и начальная поверхности червяка образованы вращением отрезка дуги делительной или начальной поверхности парного червячного колеса вокруг оси червяка;
2.по виду теоретического торцового профиля витка червяка
а)архимедов червяк (ZA) – профиль выполнен по архимедовой спирали;
б)эвольвентный червяк (ZI) – профиль выполнен по эвольвенте окружности;
 в)конволютный
червяк (ZN)
– профиль выполнен по удлиненной
эвольвенте.
в)конволютный
червяк (ZN)
– профиль выполнен по удлиненной
эвольвенте.
Червячная передача характеризуется передаточным числом u=z1/z2 где z1 – число зубьев колеса (18…300); z2 – число витков червяка (1…4), а также передаточным отношением i=1/2=u , где 1 и 2 – угловые скорости соответственно червяка и колеса.
Преимущества и недостатки червячных зубчатых передач.
Преимущества:
благодаря малому числу заходов червяка (z1= 1…4) червячная передача позволяет реализовывать в одной ступени большие передаточные отношения;
обладает высокой плавностью, низким уровнем вибраций и шума;
позволяет обеспечить самоторможение червячного колеса ( при малых углах подъема витка передача движения от вала червячного колеса к червяку становится невозможной).
Недостатки:
высокая скорость скольжения вдоль линии зуба, что ведет к повышенной склонности к заеданию ( необходимы специальные смазки и материалы для зубчатого венца червячного колеса ), снижению КПД и более высокому тепловыделению .
56
Зубчатые передачи с зацеплением М.Л.Новикова.
С целью повышения несущей способности зубчатых передач М.Л.Новиков [1] разработал новый способ образования сопряженных поверхностей для различных видов зубчатых передач с параллельными, пересекающимися и перекрещивающимися осями. Новиков предложил перейти от линейного контакта поверхностей к точечному. При этом профили зубьев в торцевом сечении могут быть не взаимоогибаемыми кривыми и их можно выполнять как выпуклый и вогнутый профили с малой разностью кривизны. В передаче с параллельными осями линия зацепления является прямой линией параллельной осям колес. Зацепление Новикова имеет только осевое перекрытие = 1 / 1 = b / pz ,
где b - ширина зубчатого венца, pz - осевой шаг. Поэтому поверхности зубьев выполняются винтовыми (косозубыми) с углом подъема винтовой линии
= 10 - 30 .
Одним из основных параметров зацепления Новикова является расстояние от полюса зацепления Р до точки контакта К, которое определяет положение линии зацепления ( прямой К-К параллельной осям вращения и проходящей через точку контакта К ) относительно оси мгновенного относительного вращения Р-Р. Согласно рекомендациям работы, это расстояние выбирается в зависимости от величины передаваемой мощности в пределах
lKP = (0.05 ... 0.2 ) rw1.

Преимущества зубчатых передач с зацеплением Новикова:
повышенная контактная прочность зубьев, за счет использования зацепления вогнутого профиля с выпуклым ( приведенный радиус кривизны определяется суммой радиусов кривизны профилей );
перекрытие в передачах Новикова обеспечивается только за счет осевого перекрытия, поэтому высота зубьев может быть достаточно малой, что обеспечивает высокую изгибную прочность зубьев ( в целом, по приблизительным оценкам, нагрузочная способность передач Новикова в 2-3 раза выше, чем косозубых эвольвентных передач с одинаковыми размерами);
точечное зацепление (пятиподвижная кинематическая пара) обеспечивает в передачах с зацеплением Новикова меньшую чувствительность к монтажным погрешностям.
К недостаткам передач Новикова можно отнести:
более сложную технологию изготовления, за счет использования инструмента с профилями криволинейной конфигурации;
наличие значительных осевых нагрузок на подшипники из-за использования винтовых зубьев с большими углами подъема винтовой линии;
склонность зубьев винтовых колес к излому у торца при входе в зацепление.
57
Сложными зубчатыми механизмами называются механизмы с зубчатыми передачами с числом зубчатых колес больше двух. Это могут быть механизмы с оригинальными структурными схемами или механизмы, образованные последовательным и (или) параллельным соединением простейших типовых зубчатых механизмов.
Кинематика рядного зубчатого механизма.
Рядным зубчатым механизмом называется сложный зубчатый механизм с неподвижными осями колес, образованный последовательным соединением нескольких простых зубчатых механизмов. Рассмотрим кинематику рядного механизма составленного из двух зубчатых передач: одной внешнего зацепления и одной внутреннего зацепления. Схема механизма изображена на рис. 15.1.

Напоминание: Для вращательного движения твердого тела относительно оси проходящей через точку А. Примем для размеров масштаб l, мм/м, а для линейных скоростей – масштаб V, мм/мс-1. Угловая скорость звенаiравна
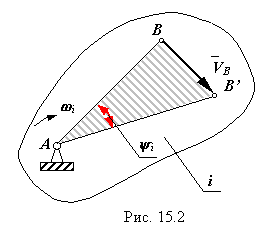
i = VB/lAB = (l /V) (BB’/AB) = (l /V) tg i = c tg i .
Таким образом при графическом кине матическом анализе угловая скорость звена равна произведению тангенса уг ла наклона прямой распределения ли- нейных скоростей на отношение масш- табов длин и скоростей.
Аналитическое исследование кинематики рядного механизма.
Из основной теоремы зацепления, для первой пары зубчатых колес с внешним зацеплением, можно записать
1/2 = - rw2/rw1 = - z2/z1;
для второй пары зубчатых колес с внутренним зацеплением
2/3 = rw4/rw3 = z4/z3 .
Передаточное отношение механизма в целом будет равна
u13 = 1/3 = (1/2) (2/3) = u12 u23= - (z2z4)/(z1z3).
Передаточное отношение сложного рядного зубчатого, образованного из нескольких соединенных последовательно простых зубчатых механизмов равно произведению передаточных отношений этих механизмов.
Графическое исследование кинематики рядного механизма.
Изобразим в масштабе l, мм/м, кинематическую схему рядного зубчатого механизма. Нанесем на эту схему линейную скорость точкиР1, изобразив ее в произвольном масштабеV, мм/мс-1 отрезкомР1Р’1. Соединим конец этого отрезка точкуР’1 с центрами вращения колес 1 и 2 точками01и 02и получим прямые, определяющие распределение линейных скоростей этих звеньев, для точек лежащих на линии центров. Эти прямые образуют с линией центров соответственно углы1 и2 . Точка Р2 является точкой касания начальных окружностей колес 3 и 4. Так как в точке касания начальных окружностей линейные скорости звеньев 2 и 3 равны, а распределение линейных скоростей по линии центров для звена 2 известно, то можно определить отрезокР2Р’2,который изображает скорость точкиР2в масштабеV, мм/мс-1.Соединив прямой точкуР’2 с центром вращения звена 3 получим прямую распределения линейных скоростей для точек звена 3, лежащих на линии центров. Угол, который образует эта прямой с линией центров, обозначим3 .Угловые скорости звеньев определятся из этой схемы по формулам
1 = (l /V) tg 1 = c tg 1 ,
3 = (l /V) tg 3 = c tg 3 .
Передаточное отношение, рассматриваемого рядного зубчатого механизма, будет равно
u13 = 1/3 = tg 1 / tg 3 .
58
Сложные зубчатые механизмы, в которых ось хотя бы одного колеса подвижна, называются планетарными механизмами
Формула Виллиса.
Формула Виллиса выводится на основании основной теоремы зацепления и устанавливает соотношение между угловыми скоростями зубчатых колес в планетарном механизме. Рассмотрим простейший планетарный механизм с одним внешним зацеплением (см. рис. 15.3). Число подвижностей в этом механизме равно Wпл = 3 n - 2p1 – 1 p2 = 3 3 - 23 – 1 1= 2 , то есть для получения определенности движения звеньев механизма необходимо сообщить независимые движения двум его звеньям. Рассмотрим движение звеньев механизма относительно стойки и относительно водила. Угловые скорости звеньев в каждом из рассматриваемых движений приведены в таблице 15.2.
В движении звеньев относительно водила угловые скорости звеньев равны угловым скоростям в движении относительно стойки минус угловая скорость водила. Если в движении относительно стойки ось зубчатого колеса 2 подвижна, то в движении относительно водила оси обоих зубчатых колес неподвижны. Поэтому к движению относительно водила можно применить основную теорему зацепления.
Движение механизма относительно стойки
|
Движение механизма |
Звено 1 |
Звено2 |
Звено h |
Звено 0 |
|
относительно стойки |
1 |
2 |
h |
0=0 |
|
относительно водила |
*1=1-h |
*2=2-h |
h-h=0 |
-h |

Движение механизма относительно водила

То есть можно записать выражение, которое называется формулой Виллисадля планетарных механизмов
*2 / *1 = (1-h) / (2-h) = -z1/z2 .
59
При кинематическом синтезе (подборе чисел зубьев колес) задача формулируется так: для выбранной схемы планетарного механизма при заданном числе силовых потоков (или числе сателлитов k) и заданном передаточном отношении u необходимо подобрать числа зубьев колес zi, которые обеспечат выполнение ряда условий.

. Обеспечить возможность сборки механизма с подобранными числами зубьев колес при заданном числе сателлитов k > 1.
Для вывода формулы условия сборки воспользуемся следующим методом. Допустим, что все сателлиты устанавливаются на оси водила в одном и том же положении – точке В1. После установки первого сателлита, зубья колес z1 и z4 определенным образом установились относительно зубьев венцов сателлита. Тогда установить второй сателлит в этом же положении будет можно, если после поворота водила на угол h колесо z1 повернется на целое число угловых шагов В. При этом зубья колес z1 и z4 установятся относительно зубьев венцов сателлита так же, как и при установке первого сателлита.
Угол поворота водила h = 2 / k;
Угловой шаг первого колеса 1 = 2 / z1 ;
Угол на который повернется первое колесо при повороте водила на угол h
1 = h u1h 1 = 2 u1h / k ;
Число угловых шагов 1 в угле 1 B = 1 / 1 ,
где B - произвольное целое число.
Подставляем все эти выражения в формулу для B и после преобразований получаем
2 u1h z1/ (k 2 ) = B u1h z1 / k = B.
Поворачивать водило можно на угол h плюс произвольное число р полных оборотов водила, то есть
h = 2 / k + 2 р = 2 / k ( 1 + k р).
С учетом этого, формула для условия сборки примет следующий вид
u1h z1 / k ( 1 + k р). = B.