

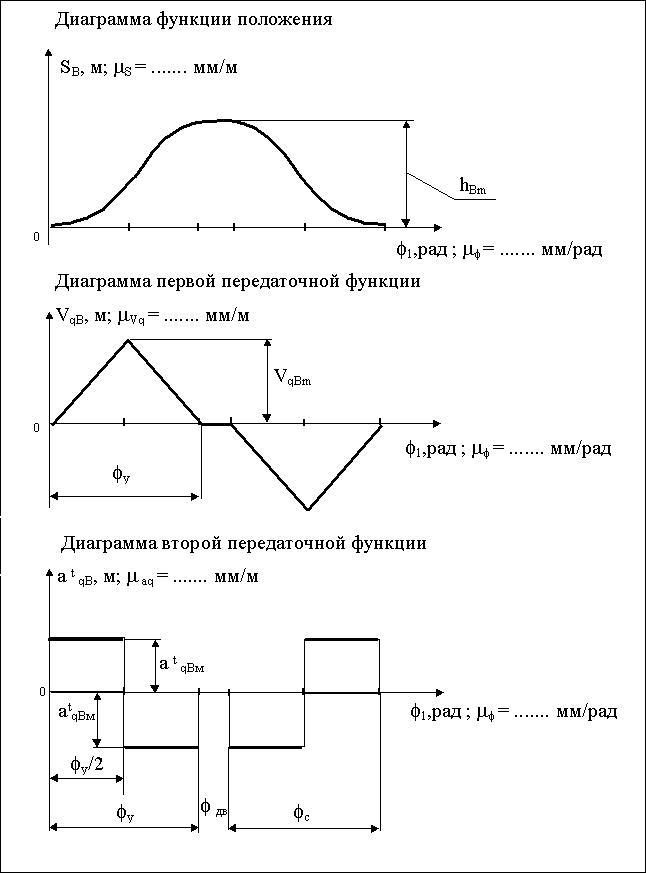
8 Метод цикловых кинематических диаграмм (Кулачковые механизмы).
Кулачковым называется трехзвенный механизм состоящий из двух подвижных звеньев - кулачка и толкателя, соединенных между собой высшей кинематической парой. Часто в состав механизма входит третье подвижное звено - ролик, введенное в состав механизма с целью замены в высшей паре трения скольжения трением качения. При этом механизм имеет две подвижности одну основную и одну местную (подвижность ролика ).
Основные параметры кулачкового механизма:
раб - фазовый рабочий угол кулачкового механизма;
раб =раб = c + дв + у;

 с-
у гол сближения;
с-
у гол сближения;
дв - фазовый угол дальнего выстоя;
у - фазовый угол удаления;
раб - профильный рабочий угол;
бв- угол ближнего выстоя;
hBm - максимальное перемещение точки В толкателя;
r0 - радиус начальной шайбы кулачка;
rр - радиус ролика.
При кинематическом анализе кулачкового механизма задан конструктивный профиль кулачка и радиус ролика rp.Методом обращенного движения ( перекатывая ролик по неподвижному конструктивному профилю кулачка ) находим центровой профиль кулачка ( траекторию центра ролика толкателя в обращенном движении ). Наносим на профиль фазовые углы и определяем в зоне ближнего выстоя начальный радиус центрового профиля кулачка r0. В зоне рабочего угла проводим ряд траекторий центра ролика толкателя ( точки В ) и по ним измеряем от точки лежащей на окружности r0 до точки лежащей на центровом профиле текущее перемещение толкателя SBi . По этим перемещениям строим диаграмму SB = f (1). Дифференцируя эту диаграмму по времени или обобщенной координате получаем кинематические или геометрические характеристики механизма. При графическом дифференцировании масштабы диаграмм зависят от масштабов исходной диаграммы и выбранных отрезков дифференцирования:
S = yhb/ hB мм/м; = b/р мм/рад ; t = b/tр мм/с ;
Vq = k1*S/ мм/м; aq = k2*Vq/ мм/м ;
V = k1*S/t мм/м.с-1; a = k2*V/t мм/м.c-2 ;
где b - база диаграммы по оси абсцисс в мм, yhB - ордината максимального перемещения толкателя в мм, hB - максимальное перемещение толкателя в м, tр - время поворота кулачка на фазовый угол р в с, k1 и k2 - отрезки дифференцирования в мм.
9
Метод преобразования координат ( Манипуляторы )
При использовании метода преобразования координат задача о положении выходного звена решается путем перехода из системы в которой это положение известно в систему в которой
его требуется определить. Переход от системы к системе осуществляется перемножением матриц перехода в соответствующей последовательности.
Формирование матрицы перехода для плоских механизмов.
Координаты точки М в системе i через координаты этой точки в системе j определятся
следующей системой уравнений
 xMi
= a
+ xMj
*cos
ij
+
yMj*sin
ij
xMi
= a
+ xMj
*cos
ij
+
yMj*sin
ij
yMi = - b - xMj*sin ij + yMj*cos ij
1 = 1 + 0 + 0
Тогда векторы столбцы координат точки М и матрица перехода из системы j в систему i
xMi
cos ij
sin ij
a
xMj
_ _
rMi = yMi ; Mij = - sin ij cos ij b ; rMj = yMj ;
1 0 0 1 1
Векторное уравнение перехода из системы j в систему i
rMi = Mij * rMj.
10 Силовой расчет типовых механизмов.
Постановка задачи силового расчета: для исследуемого механизма при известных кинематических характеристиках и внешних силах определить уравновешивающую силу или момент (управляющее силовое воздействие) и реакции в кинематических парах механизма.
Виды силового расчета:
статический - для механизмов находящихся в покое или движущихся с малыми скоростями, когда инерционные силы пренебрежимо малы, или в случаях, когда неизвестны массы и моменты инерции звеньев механизма (на этапах, предшествующих эскизному проектированию);
Уравнения статического равновесия:
f m
Fi = 0; Mi = 0;
i=1 i=1
где Fi - внешние силы, приложенные к механизму или его звеьям,
Mi- внешние моменты сил, приложенные к механизму или его звеьям.
(Определение сил ведется без учета тех дополнительных сил ,которые возникают при движении механизма)
Определение числа неизвестных при силовом расчете. Для определения числа неизвестных, а, следовательно, и числа независимых уравнений, при силовых расчетах необходимо провести структурный анализ механизма и определить число и классы кинематических пар, число основных подвижностей механизма, число избыточных связей. Чтобы силовой расчет можно было провести, используя только уравнения кинетостатики, необходимо устранить в нем избыточные связи. В противном случае, к системе уравнений кинетостатики необходимо добавить уравнения деформации звеньев, необходимые для раскрытия статической неопределимости механизма. Так как каждая связь в КП механизма соответствует одной компоненте реакции, то число неизвестных компонент реакций равно суммарному числу связей накладываемых КП механизма. Уравновешивающая сила или момент должны действовать по каждой основной подвижности механизма. Поэтому суммарное число неизвестных в силовом расчете определяется суммой связей в КП механизма и его основных подвижностей
H-1
ns = W0 + (H-i)pi ,
i=1
где ns - число неизвестных в силовом расчете.
11
С иловой
расчет типовых
механизмов.
иловой
расчет типовых
механизмов.
Постановка задачи силового расчета: для исследуемого механизма при известных кинематических характеристиках и внешних силах определить уравновешивающую силу или момент (управляющее силовое воздействие) и реакции в кинематических парах механизма.
Виды силового расчета:
статический - для механизмов находящихся в покое или движущихся с малыми скоростями, когда инерционные силы пренебрежимо малы, или в случаях, когда неизвестны массы и моменты инерции звеньев механизма (на этапах, предшествующих эскизному проектированию);
Уравнения статического равновесия:
f m
Fi = 0; Mi = 0;
i=1 i=1
где Fi - внешние силы, приложенные к механизму или его звеьям,
Mi- внешние моменты сил, приложенные к механизму или его звеьям.
кинетостатический - для движущихся механизмов при известных массах и моментах инерции звеньев, когда пренебрежение инерционными силами приводит к существенным погрешностям;
Уравнения кинетостатического равновесия:
f n m k
Fi + Fиi = 0; Mi + Mиi = 0;
i=1 i=1 i=1 i=1
где Fиi -инерционные силы, приложенные к звеньям,
Mиi- моменты сил инерции, приложенные к звеньям.
(Таким образом , при применении принципа Даламбера к расчету механизмов кроме внешних сил , действующих на каждое звено механизма, вводятся в рассмотрение еще и силы инерции , величины. Составляя для полученной системы сил уравнения равновесия и решая их, определяем силы, действующие на звенья и возникающие при его движении)
Применение:
Метод проекций или аналитический (Например: кинетостатический расчет четырехшарнирного механизма ).
Метод планов сил (Например: кинетостатический расчет зубчатой передачи или кулачкового механизма)
Кинетостатический с учетом трения - может быть проведен когда определены характеристики трения в КП и размеры элементов пар.