

3640
.pdfПредварительное значение внешнего диаметра якоря:
Предварительное значение активной длины якоря:
Диаметр выходного конца вала:
где 
 – коэффициент запаса
– коэффициент запаса 









 – допустимое напряжение, определяемое пределом усталости материала вала 14Х17Н2
– допустимое напряжение, определяемое пределом усталости материала вала 14Х17Н2 
















Примем диаметр вала в центральной части: 










 .
.
Примем диаметр индукторно кольца: 










 .
.
Внешний диаметр индуктора:
71

Высота магнитов:
Рассчитаем конструктивное соотношение 

 :
:
Максимальная индукция в воздушном зазоре:
где 

 – магнитная постоянная
– магнитная постоянная 











 ;
;
Расчетное значение магнитного потока:
72

Затем методом конечных элементов, который заложен в программном обеспечении Elcut, определим индукцию в зубце, ярме, воздушном зазоре, магнитах (Рис. 1,2).
Рис. 1. Картина магнитного поля в магнитной системе
Рис. 2. Распределение индукции в магнитной системе
Расчетные картины магнитного поля (рис. 1) и распределение индукции в магнитной системы (рис. 2) показывают, что зубцы сердечника имеют допустимое насыщение 






 , материал спинки сердечника якоря недоиспользован и не соответствует применяемому постоянному магниту NdFeB (
, материал спинки сердечника якоря недоиспользован и не соответствует применяемому постоянному магниту NdFeB (

























 .
.
73
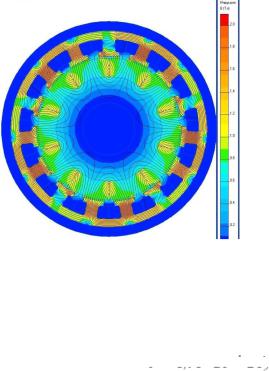
Вывод: Исходя из полученных результатов (рис. 2 и 3) можно сделать вывод, что внешний диаметр якоря завышен и его следует уменьшить.
Всвязи со сделанными выше выводами, уменьшим диаметр якоря, проведем повторно электромагнитный расчет и смоделируем методом конечных элементов в программном обеспечении Elcut.
Врезультате получена следующая картина (Рис. 3):
Рис. 3. Распределение индукции в модернизированной магнитной системе
За счёт уменьшения диаметра якоря удалось добиться лучшего использования егоматериала.
Принятие длины магнитной системы машины, равной 23,5% от внешнего диаметра якоря, позволило достичь оптимальной величины магнитногопотока в электродвигателе(













 .
.
Литература
1.Справочник по электрическим машинам. В двух томах. под общ. ред. И.П. Копылова и Б.К. Клокова. Том 1./ И. П. Копылов – М.: Энергоатомиздат, 1988.
2.Вольдек А.И. Электрические машины: учебник. — 3-е изд., перераб./ А. И. Вольдек — Л.: Энергия, 1978.
Воронежский государственный технический университет
74

УДК 621.398
И.С. Цыплаков, Е.Л. Савельева
КОММУТАТОР ДЛЯ БЕСЩЕТОЧНОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Описывается общая схема управления бесконтактными машинами постоянного тока
Ключевые слова: электродвигатель, коммутатор, микроконтроллер
Представим упрощённую схему бесщёточного электродвигателя постоянного тока (БДПТ) на (Рис. 1).
Рис.1. Упрощённая схема БДПТ
Одним из основных элементов коммутатора являются силовые ключи. Благодаря силовым ключам осуществляется подача напряжения на основные обмотки бесщёточного электродвигателя постоянного тока. В качестве силовых ключей в основном используются управляемые полупроводниковые элементы:
75

тиристоры и транзисторы. Подбор силовых ключей стоит подбирать из комбинации многих параметров. При увеличении мощности двигателя действует следующая иерархия силовых ключей: MOSFET-транзисторы, IGBT-транзисторы, GTO и GTC тиристоры. Однако частотные характеристики при таком подходе идут на убыль. Ниже представлены графики функций тока в обмотках двигателя разных частотных диапазонов при широко-имульсном регулировании, а именно при 1 кГц и при 20 кГц.
Рис. 2. Ток в обмотках статора при 1 кГц
Рис. 3. Ток в обмотках статора при 20 кГц
То есть при увеличении мощности двигателя необходимо не забывать о том, что это обратно пропорционально частотным характеристикам двигателя.
76
Вторым по важности элементом в коммутаторе является микроконтроллер. Это тот элемент, который определяет положение ротора (с помощью датчиков или другими способами) и в зависимости от положения задаёт соответствующий сигнал для отпирания силовых ключей. То есть микроконтроллер задает форму напряжения, которая поступает на обмотки двигателя. С учетом изменения геометрии двигателя во время его проектировки и возможностью задать любую форму подающего напряжения, можно на уровне проектировки добиться расширение и улучшение характеристик, при комбинировании различных типов параметров. В большинстве случаев задают широко-импульсное регулирование
(ШИМ).
Обычно микроконтроллер не подаёт напрямую сигнал силовым ключам. Для того чтобы этот сигнал можно было принять между микроконтроллером и силовым ключом находятся драйвер. Драйвер непосредственно принимает входной сигнал и преобразует его до состояния, когда силовой ключ может отреагировать на него. Он выполняет функцию усиления, частичной коррекции сигнала, фильтром шумов и т.д. Драйверы, как и микроконтроллеры, являются сложными микросхемами, поэтому рассматривать его внутреннюю схему так же бессмысленно. Каждый отдельный драйвер характеризуется тем ключом, к которому он спроектирован. Более того некоторые ключи уже имеют драйверы, вследствие чего отпадает проблема поиски и подбора отдельного драйвера.
В качестве питания коммутатора используется источники постоянного тока. Обычно в качестве источника используют литиевые аккумуляторы. На сегодняшний день они являются самыми энергоёмкими аккумуляторами. Так же используются никель-кадмиевые аккумуляторы. Их энергетические характеристики ниже, однако, они более надёжны и долговечны. Так же можно питать двигатель от переменного источника напряжения, поставив при этом выпрямители и фильтры. Желательно иметь минимально возможно пульсирующий источник постоянного тока, так как это может существенно влиять на характеристики двигателя. Поэтому не желательно использовать источники переменного напряжения. Стоить отметить, что питание подаётся не только к силовым ключам для создания тока в обмотках машины. Так же питание необходимо подавать на микроконтроллер и на драйверы. Для питания данных элементов обычно используют отдельные
77
источники напряжения. Однако можно питать одним, но необходимы соответствующие периферийные элементы. Кроме преобразования источника периферия используется для отладки спроектированного коммутатора. Это необходимость возникает изза того, что каждый элемент, и каждый источник не соответствуют идеальной конструкции. Кроме того, сигналы высокочастотные и не большие. Поэтому смежно стоящие дорожки, полупроводниковые элементы и конденсаторы начинают взаимодействовать на уровне энергетических полей в воздухе. Для компенсации всех этих недостаток вводят дополнительные элементы, обычно даже после сборки коммутатора. Для каждого коммутатора имеется своя периферийная система. Это зависит от многих параметров. Иногда создаётся база периферийных систем для каждого отдельного коммутатора, в ходе эмпирических исследований. Если не вводить периферию в коммутатор могут сильно пострадать характеристики двигателя, а в некоторых случаях даже не запуститься.
Литература
1.Горюнов А.В. Микроконтроллеры микропроцессорных систем управления. –Томск, 2012
2.Элементы теории вентильного привода. URL: http://epuitc.ru/info/drive(Дата обращения 11.03.2016).
3.СеменовБ.Ю. Силовая электроника для любителей и профессионалов. –М.: Солон-Р, 2001
4.Корягин А. Силовая часть регулятора BLDC двигателей. 2014 г. URL: http://www.avislab.com/blog/brushless09_ru/(Дата обращения 06.03.2016).
5.Техническая документация IRFP4568PBF. URL: http://www.irf.com/product-info/datasheets/data/irfp4568pbf.pdf(Дата обращения 10.03.2016).
6.Техническая документация IR2110SPBF. URL: http://www.irf.com/product-info/datasheets/data/ir2110.pdf(Дата обращения 10.03.2016).
Воронежский государственный технический университет
78
УДК 621.3.07
А.Н. Калабухов
РАЗРАБОТКА БЛОКА УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ МАЛОЙ МОЩНОСТИ
В статье представлен блок управления синхронным двигателем малой мощности на базе микроконтроллера
Ключевые слова: синхронный электродвигатель, микроконтроллер, широтно-импульсная модуляция, управление, частота вращения
Сегодня без эффективных средств управления невозможны комплексная автоматизация производства, развитие энергетики, средств транспорта, автомобилестроения и спецтехники. Поэтому, в настоящее время широко применяется цифровое управление двигателями.
Электрические машины малой мощности представляют собой особый подкласс электрических машин. Это обусловлено в первую очередь их широким применением в самых различных областях народного хозяйства. Бытовые электроприборы, медицинская аппаратура, вычислительная техника, устройства передачи и преобразования информации, системы автоматического управления и регулирования, морская, авиационная и космическая техника и автомобильный транспорт – вот далеко не полный перечень областей применения электрических машин данного подкласса.
Синхронный двигатель с постоянными магнитами (СДПМ) имеет преимущества по сравнению с другими двигателями, которые обычно используются для сервоприводов переменного тока, что можно проанализировать на основе математических моделей данных двигателей. Использование постоянных магнитов в роторе СДПМ позволяет создать простую и надёжную и компактную машину с постоянным возбуждением. Следовательно, СДПМ обладает более высокой удельной мощностью и будет более эффективным, чем асинхронный.
В рамках работы студенческого научного общества кафедры радиоэлектроники и компьютерной техники был спроектирован электронный блок управления синхронным двигателем малой мощности. В качестве синхронного двигателя был использован двигатель жёсткого диска компьютера. Такой двигатель, согласно
79

отечественной теории электрических машин, классифицируется как синхронная машина с возбуждением от постоянных магнитов. В
западной терминологии PMSM (англ. Permanent Magnet Synchronous Motor).
Внешний вид и схемотехническое исполнение двигателя жёсткого диска представлены на (Рис.1,2).
Рис. 1. Внешний вид двигателя жёсткого диска компьютера
Рис. 2. Конструктивное исполнение двигателя жёсткого диска
Электродвигатель жесткого диска трехфазный, что обеспечивает стабильность вращения магнитных дисков, смонтированных на оси (шпинделе) двигателя. Статор двигателя содержит три обмотки, включенные звездой с отводом посередине, а ротор - постоянный секционный магнит. Для обеспечения малого биения на высоких оборотах в двигателе используются гидродинамические подшипники.
Для управления данным двигателем была разработана схема электрическая и собран блок управления синхронным двигателем на базе микроконтроллера ATMEGA8 (Рис. 3).
80