

3535
.pdfоснащаться датчиками тока и напряжения фирмы ТВЕЛЕМ (г. Тверь). В табл. 5.11 показаны технические характеристики датчиков.
Таблица 5.11
Оригинальные схемотехнические и конструктивные решения, реализованные в модульных преобразователях ПТЭМ – 2Р, обеспечивают высокую надежность работы и
максимальную простоту и удобство эксплуатации. |
|
|||||
Как |
показала |
практика использования |
различных |
|||
систем |
управления |
ЭП, |
оптимальной на современном |
|||
этапе является |
структура |
экскаваторного |
типа |
ЭП |
||
постоянного |
тока |
по |
системе ТВ-Г-Д, в |
основу |
||
возбуждения генератора которой положен модульный
преобразователь. Такая |
унифицированная системы |
тиристорного возбуждения |
обеспечивает практически |
безотказную работу главных электроприводов экскаватора любой мощности при реальной вероятности отказов преобразователей.
Критериями оптимальности при этом являются:
- безналадочность системы управления (параметры
системы, |
предварительно рассчитанные с инженерной |
|
точностью, |
выставляются во |
внешней ячейке |
управления приводом); |
|
|
-высокие динамические свойства ЭП, высокая плавность переходных процессов, хорошее заполнение времятоковой диаграммы, высокое быстродействие ЭП, сочетаемое с надежным ограничением ускорений и нагрузок в механизмах, что позволяет обеспечить максимальную интегральную производительность экскаватора;
-повышенная надежность системы,
определяемая комплексом простых и эффективных схемотических решений в сочетании с удачной компоновкой тиристорных преобразователей, ячеек управления и других элементов;
- |
обеспечение |
при |
данной |
( ограниченной ) |
|||||
надежности |
преобразователей |
и |
ячеек |
управления |
|||||
бесперебойности |
работы |
экскаватора за счет удобного |
|||||||
резервирования |
( при |
любых |
|
отказах |
в |
работе |
|||
преобразователя |
или ячейки управления они заменяются |
||||||||
машинистом экскаватора на исправные резервные ); |
|
||||||||
- |
возможность |
организации |
централизованного |
||||||
ремонта |
|
резервных |
преобразователей |
и |
ячеек |
||||
управления в электроцехах предприятий.
Разработанная структура представлена на рис. 5.23. В воздействующий на вход тиристорного возбудителя системе управления сохранѐн принцип подчинѐнного регулирования. Внутренний контур тока, настроенный на технический оптимум, подчинѐн внешнему контуру ЭДС, также настроенному на технический оптимум. Задание на вход регулятора ЭДС подаѐтся с регулируемого задатчика интенсивности (РЗИ). Сигнал обратной связи по току UОТ.Я снимается с датчика тока ДТ и подаѐтся на вход регулятора тока РТ в качестве отрицательной обратной связи по току якоря. Сигнал обратной связи по ЭДС снимается с датчика ЭДС и подаѐтся на вход регулятора ЭДС РЭ в качестве отрицательной обратной связи по ЭДС генератора.
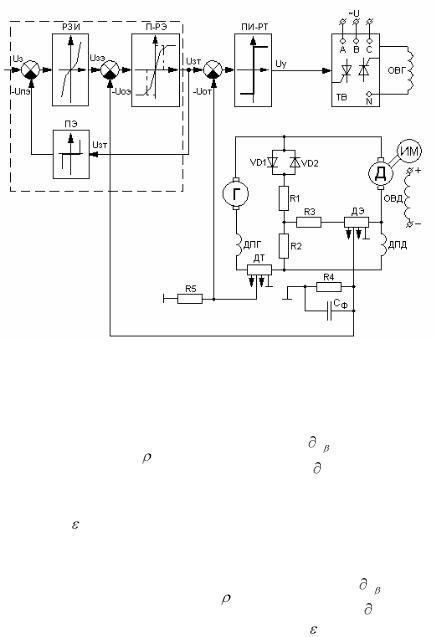
Рис. 5.23. |
Оптимальная структура |
экскаваторного |
||
электропривода |
постоянного тока по системе ТВ – Г – Д |
|||
Задатчик интенсивности имеет два участка: первый (0- |
||||
t1) – низкий темп |
нарастания задания, необходимый для |
|||
|
|
|
I |
|
ограничения рывка |
и производной тока |
|
, которая не |
|
t |
||||
должна превышать величины 10-15 Iном /с и второй участок (t1-t2), обеспечивающий максимально допустимое ускорение привода мах , которое регламентировано техническими
условиями на экскаватор. Таким образом, регулируемый задатчик интенсивности позволяет независимо и раздельно
|
|
|
|
I |
|
ограничивать величину рывка |
мах , производной |
|
мах , |
||
|
|||||
|
|
|
|
t |
|
максимальное |
ускорение |
привода |
мах , |
задавая |
|
определенный темп изменения управляющего воздействия и
уровень сигналов на первом, втором участках своей характеристики и ограничивая быстродействие привода по управляющему воздействию в любой необходимой степени. В случае тяжѐлых переходных процессов, при вступлении в действие токоограничения, темп нарастания задания на втором участке задатчика интенсивности понижается и как бы отслеживает ускорение ЭП. При подаче оператором команд на реверс в момент времени t3, ЭП практически мгновенно начинает реверсировать, а не продолжает разгоняться.
Используя инженерный метод последовательной коррекции, контур тока и контур ЭДС системы ТВ-Г-Д основных механизмов экскаватора настраивают на технический оптимум. Опыт наладки и исследования экскаваторных электроприводов показывает, что для получения требуемых динамических качеств электропривода достаточно осуществить настройку контура тока при снятом возбуждении двигателя (опыт короткого замыкания) и контура регулирования ЭДС при разомкнутой якорной цепи (опыт холостого хода). При оптимальной настройке контуров в этих искусственных режимах обеспечивается оптимальная динамика привода в рабочем состоянии.
В качестве возбудителя генератора использован тиристорный преобразователь серии ПТЭМ-2Р. Данная оптимальная структура управления по системе ТВ-Г-Д удовлетворяет всем требованиям, предъявляемым к электроприводам главных механизмов экскаваторов, обладает весьма большими возможностями формирования статических характеристик и динамических свойств, обеспечивает все возможные режимы работы электроприводов экскаватора.
ЗАКЛЮЧЕНИЕ
Данное учебное пособие содержит сведения и рекомендации по проектированию электроприводов как
общепромышленных механизмов, так и специального назначения.
Рассматриваемые в учебном пособии методики расчета электроприводов, учитывающие специфику конструктивных особенностей механизмов и технологические режимы работы, позволят студентам осознанно освоить методы, которые применяются в практике проектирования электрических приводов.
Сведения о современном состоянии и перспективных направлениях систем управления электроприводами дадут студентам возможность выбрать рациональную с точки зрения технико-экономических показателей систему
электропривода. |
|
|
|
Дальнейший |
анализ |
динамических |
свойств |
механической части, статических и динамических характеристик и энергетических показателей электропривода выполняется по хорошо известным положениям учебного курса «Теория электропривода» и разработанных методических рекомендаций.
Данное учебное издание существенно восполнит имеющийся пробел в учебной литературе по проектированию электроприводов.
Учебное пособие поможет студентам специальности 140604 «Электропривод и автоматика промышленных установок и технологических комплексов» при курсовом и дипломном проектировании, а также может быть полезно студентам специальностей 140601 «Электромеханика» и 110302 «Электропривод и электрификация сельского хозяйства» при проектировании автоматизированного электропривода.
6. ДИНАМИЧЕСКИЕ СВОЙСТВА МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
6.1. Приведение кинематической схемы электропривода к расчетной схеме
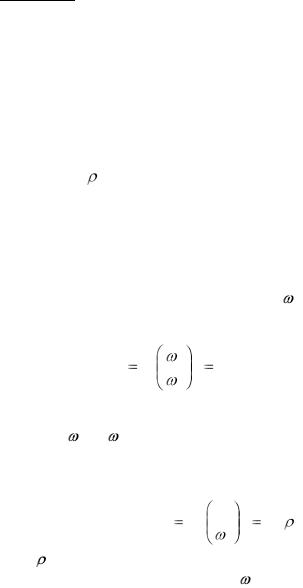
. В основу приведения в соответствие указанных схем положен закон сохранения энергии. При приведении кинематической схемы к расчетной необходимо обеспечить сохранение запаса кинетической и потенциальной энергии системы, а также величины элементарной работы всех действующих в системе сил и моментов на возможных перемещениях. Следует иметь в виду, что для приведения параметров кинематической схемы к расчетной схеме при вращательном движении необходимо знать передаточное число от вала двигателя до i-го элемента, а в случае поступательного движения требуется знать радиус приведения 1 j j- го элемента к валу двигателя.
Приведение моментов инерции и масс к валу двигателя
Для вращательного движения закон сохранения энергии в случае приведения угловой скорости i-го элемента к угловой скорости двигателя 1 можно формула приведения
|
|
|
|
2 |
|
Ji |
|
|
|
|
||
|
J прi |
Ji |
|
i |
|
|
, |
|
|
(6.1) |
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1 |
|
|
i21i |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
где Jпрi - приведенный момент инерции i-го элемента |
||||||||||||
i1i= |
1 / i |
- передаточное число от вала двигателя |
||||||||||
(цифра 1) к i - ому валу установки. |
|
|
|
|||||||||
Для поступательно движущихся масс тогда имеем |
||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|||
|
|
J прj |
|
m j |
V j |
m j |
21 j , |
(6.2) |
||||
|
|
|
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
где 1j – |
радиус |
приведения |
j-го |
|
поступательно |
|||||||
движущегося элемента к скорости |
1. |
|
|
|||||||||
Приведение моментов и усилий к валу двигателя

Формулы приведения можно получить из равенства мощностей:
Мi · i = Мпр1i · 1 ; Fj ·Vj = Мпр1j ·w1
(6.3)
Из равенств (6.3) следует, что |
|
||
Мпр1i = Мi ( |
i / |
1) = Мi / i1i ; |
(6.4) |
Мпр1j = Fj (Vj / 1) |
= Fj |
1j . |
(6.5) |
Рассмотренные ранее правила приведения моментов и усилий характерны для получения приведенных полезных моментов, но не статического момента на валу двигателя, так как не учитывают потери в кинематической цепи.
Для получения значения статического момента Мс необходимо знать направление потока энергии:
а) прямой поток мощности |
(подъем груза); |
б) обратный поток мощности |
(спуск груза). |
Получение статического момента
Для прямого направления потока энергии
статический момент
M c M |
|
ио |
|
М ио |
, |
(6.6) |
ио |
|
ip |
||||
|
1 |
|
|
|
||
где Мио / iр= Мпол - полезный приведенный момент исполнительного органа;
При поступательном движении статический момент будет равен
Мс = Fj · |
Vj |
|
1 |
Fj· 1 j · |
1 |
(6.7) |
|
|
|
|
|||
1 |
|
|
|
|
|
|

Для обратного направления потока энергии,
например при спуске груза, когда поток энергии направлен от рабочей машины к двигателю, статический момент определяется из условия равенства мощностей:
- при вращательном движении статический момент на валу двигателя равен
|
M c M ио |
|
ио |
|
М ио |
, |
(6.8) |
|
|
|
1 |
|
ip |
||||
|
|
|
|
|
|
|||
где |
Мио / i1i= Мпол |
- приведенный полезный момент |
||||||
исполнительного органа; |
|
|
|
|
|
|
||
|
- при поступательном движении статический момент |
|||||||
на валу двигателя равен |
|
|
|
|
|
|
||
|
Мс = Fj · |
Vj |
|
Fj· 1 j · |
(6.9) |
|||
|
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
Приведение упругих деформаций
Для вращательного движения при i 1i = const приведенное значение упругой деформации
1 = |
пр1i = |
i i1j |
(6.10) |
Для линейных перемещений при постоянстве радиуса приведения
1j = Sj / φ1, |
(6.11) |
приведенное значение линейной деформации определим как
1i = Sj / 1j |
(6.12) |
Приведение жесткостей упругих связей
При угловых деформациях приведенное к валу двигателя значение жесткости Ci равно

(6.13)
При линейных деформациях приведенная жесткость Cj к валу двигателя
|
|
2 |
|
|
||
|
|
|
S j |
2 , |
(6.14) |
|
|
Cпр1i |
Сi |
|
|
Сi 1 j |
|
|
пр1 j |
|
||||
|
|
|
|
|
||
поскольку |
пр1j = Sj / |
1j . |
|
|
||
Двухмассовая расчетная схема является основной при |
||||||
анализе динамики механической части электропривода. |
||||||
Помимо |
последовательных |
расчетных |
схем |
|||
существуют другие виды расчетных схем, например двухдвигательный электропривод (рис. 6.1), в котором двигатели (Дв.1и Дв.2) работают на одну рабочую машину
(РМ).
Рис. 6.1. Блок-схема двухдвигательного электропривода
В этом случае механическая часть представляет параллельную расчетную схему, эквивалентная расчетная схема которой представлена на рис. 6.2.
Рис. 6.2. Эквивалентная расчетная схема двухдвигательного электропривода
Расчет оптимального передаточного числа
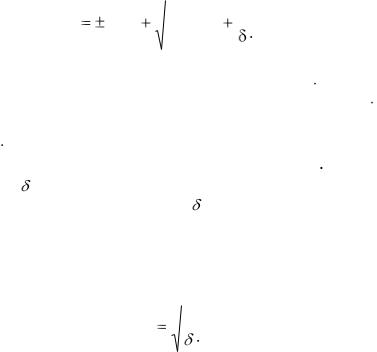
При приведении параметров кинематической схемы к расчетной участвует передаточное число редуктора, поэтому его значение следует оптимизировать.
Расчѐт оптимального передаточного числа редуктора iопт ведѐтся с целью минимизации потерь в ЭП и увеличение его быстродействия. При неоптимальном передаточном числе максимум потерь будет приходиться на разгон и торможение ЭП. Чем больше число включений в час, тем большее влияние будет оказывать передаточное число редуктора. Для механизмов, имеющих большую частоту включений в час (600-800), принимают передаточное число, близкое к оптимальному,
|
iопт |
M с |
|
( |
M с |
|
) |
2 |
|
|
J м |
|
(6.15) |
||
|
M н |
M н |
|
|
|
|
J p |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
где |
Mн – номинальный момент двигателя, H м ; |
||||||||||||||
|
Mc – статический момент механизма на валу, H м ; |
||||||||||||||
|
Jм – момент |
инерции |
|
|
|
приводного |
механизма, |
||||||||
кг |
м2 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Jp – момент инерции ротора двигателя, кг |
м2 . |
|||||||||||||
|
- коэффициент, учитывающий моменты инерции |
||||||||||||||
отдельных звеньев передачи ( |
=1,1-1,3). |
|
|
||||||||||||
|
Знак ―плюс‖ в выражении (6.15) берѐтся при пуске |
||||||||||||||
ЭП, а ―минус‖–при торможении. |
|
|
|
|
|
|
|||||||||
|
При пуске и торможении приводного механизма |
||||||||||||||
вхолостую iопт определяют по упрощенной формуле |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
iопт |
|
|
J м |
|
|
|
|
|
(6.16) |
||||
|
|
|
|
|
|
J p |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
График зависимости |
iопт |
|
от (Mс/Mн) |
представлен |
||||||||||
на рис. 6.3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|