

2214
.pdfВтабл. 3 используются следующие обозначения временных функций и коэффициентов передачи моделей:
В– вариант задания;
Кд1, Кд2 – коэффициент передачи модели 1-го и 2-го двигателей ;
Тм1, Тм2 – механическая (электромеханическая) постоянные времени модели 1-го и 2-го двигателей;
Хвх1=К*1(t), Хвх1=К*1(t)– ступенчатая функция на входе модели 1-го и 2-го двигателя;
h(t), dh(t)/dt – переходная и скорость переходной характеристики на выходе модели 1-го или 2-го двигателя.
Втабл. 4-5 используются следующие обозначения временных функций и коэффициентов передачи моделей:
В– вариант задания;
Кд1, Кд2 – коэффициент передачи модели 1-го и 2-го двигателей ;
Тм1, Тм2 – механическая (электромеханическая) постоянные времени модели 1-го и 2-го двигателей;
Тэ1, Тэ2 – механическая (электромагнитная ) постоянные времени модели 1-го и 2-го двигателей;
Хвх1=К*1(t), Хвх2=К*1(t)– ступенчатая функция на входе модели 1-го и 2-го двигателя;
h(t) – переходная характеристика на выходе модели 1-го или 2-го двигателя;
Хвх1=К*t, Хвх2=К*t– линейная функция на входе модели 1-го и 2-го двигателя;
у(t) – временная характеристика на выходе модели 1-го или 2-го двигателя.
41
ЛАБОРАТОРНАЯ РАБОТА № 3
ИССЛЕДОВАНИЕ КАЧЕСТВА СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
СКОРОСТИ
Цель работы: определение влияния коэффициента передачи регулятора скорости Крег на параметры качества системы регулирования скорости двигателя постоянного тока.
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
При проектировании технологической системы обработ- |
||
ки деталей на металлорежущем |
станке (МРС) к исполни- |
|
тельной системе, в |
виде системы |
регулирования скорости |
вращения двигателя |
постоянного тока, предъявляются следу- |
|
ющие технические требования:
малые колебания выходного сигнала (входного и выходного вала редуктора);
максимальное быстродействие и плавность перемещений в начале и окончании технологической операции.
Параметры качества системы автоматического регулирования скорости определяются по переходной характеристике выходного сигнала двигателя.
Для технической системы по переходной характеристике h(t) определяются:
время регулирования tр, перерегулирование (колебательность) σ, время нарастания tн,
максимальное значение скорости переходной характе-
ристики dhmax/dt
время спада скорости переходной характеристики tсп. На рис. 16 представлена переходная характеристика вы-
ходного сигнала двигателя (скорости вращения вала ), где
42

показаны необходимые построения для определения заданных показателей качества.
Время регулирования определяется из условия
| h(t) – hуст | ≤ Δ,
где – допустимое отклонение переходной характеристики h(t) от ее установившегося значения hуст.
Рис. 16. Переходная характеристика
В зависимости от математической модели двигателя постоянного тока или мощности двигателя (передаточной функции) в системе регулирования скорости вращения возможно наблюдать при ступенчатом единичном входном сигнале 1(t) три вида переходных процессов:
1- апериодический переходной процесс 1-го порядка; 2- апериодический переходной процесс 2-го порядка; 3- колебательный переходной процесс.
43
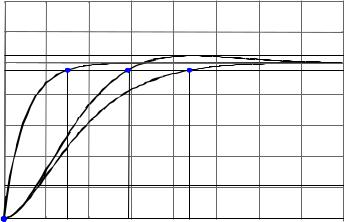
На рис. 17 представлены три вида переходных характе- |
||||||||
ристик с определением параметров качества регулирования. |
||||||||
1.4 |
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
0.8 |
1 |
|
|
|
|
|
|
|
plit |
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
t1 |
t2 |
|
t3 |
|
|
|
0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0 |
||||||||
|
|
|
|
Time |
|
|
|
|
Рис. 17. |
Три вида переходных характеристик |
|
||||||
Коэффициент передачи К влияет на установившееся значение hуст, постоянная времени - на значение времени регулирования tр и коэффициент демпфирования Do – на характеристику колебательности.
Обычно принимается значение допустимого отклонения = 0.05*hуст.
Следовательно, нижняя и верхняя запретные области переходной характеристики системы ограничены горизонтальными координатами 0.95*hуст и 1.05*hуст.
Перерегулирование определяется по выражению:
σ = ( hмак – hуст) / hуст * 100%,
где hмак, hуст – максимальное и установившееся значения переходной характеристики.
44
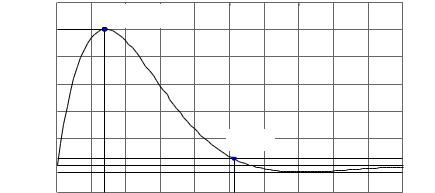
Дополнительными показателями качества регулирования систем является показатели, определяемые по импульсной переходной характеристике, то есть по скорости изменения переходной характеристики системы dh/dt.
К этим показателям относятся максимальное значение скорости переходной характеристики dhmax/dt и время спада скорости переходной характеристики tсп.
Время спада или время уменьшения скорости определяется для допустимого отклонения = ± 0.05dhmax/dt.
На рис. 17 представлена скорость переходной характеристики и выполнены дополнительные построения для определения параметров качества регулирования.
dh/dt |
dhmax/dt |
|
tсп |
0 |
t |
Рис. 17. |
Скорость переходной характеристики |
Используя приведенные показатели качества регулирования при моделировании можно получить заданные технические характеристики реальных систем.
При проектировании технических систем, например для МРС системы регулирования скорости вращения двигателя указывается вид переходного процесса и основные параметры качества регулирования такие, как время регулирования, перерегулирование, максимальное значение скорости переходной характеристики и время спада.
45
Математическая модель системы управления СУ представляется передаточной функцией пропорционального звена.
WСУ(р) = КСУ = U2/U1.
Математическая модель датчика скорости ДС , как пропорционального звена, определяется
Wдс(р) = КДС = UДС /Ω2.
Двигатель постоянного тока ДПТ сводится к передаточной функции апериодического звена (табл. 2, л.р. 2).
Передаточная функция регулятора скорости РС опреде-
ляется законом регулирования.
При пропорциональном законе регулирования передаточная функция регулятора определяется:
Wрс(р) = Крс=Uрс/Uзс
где Крс– коэффициент передачи регулятора скорости. Рассмотрим структурную схему системы автоматическо-
го регулирования (САР) скорости для механизмов МРС.
В зависимости от математической модели двигателя постоянного тока существует несколько видов структурных схем, где наблюдаются различные или одинаковые по форме переходные процессы
На рис. 18 система автоматического регулирования скорости (САР) включает:
математическую модель регулятора скорости Wрс(р); математическую модель системы управления Ксу, математическую модель датчика скорости Кдс и математическую модель двигателя постоянного тока
Wд(p), как апериодического звена (А-звена).
46

Х Wрс(p) |
Wсу(p) |
|
|
|
Wд(p) |
У |
|||||||
|
|
|
Крс |
|
Ксу |
|
|
|
К / (Т p + 1) |
|
|
||
_ |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Wдс(p) |
|
|
||
|
|
|
|
|
|
|
|
|
Кдс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.
Рис. 18. САР скорости
Представленную структурную схему САР скорости методом преобразования можно упростить и свести к ТДЗ – апериодическому 1-го порядка. Передаточная функция соединения с ООС имеет следующий вид:
Wooc(p) = { Крс Ксу К /(Т р + 1)}/{1 + Крс Ксу Кдс К/(Т р + 1) = Крс Ксу К/ [Т р + (1 + Крс Ксу К Кдс)].
После преобразования полученного значения передаточная функция САР скорости сводится к выражению
Wсар(p) = Ко/ (То*р + 1),
где Ко = Крс*Ксу*К/(1 + Крс*Ксу*К*Кдс) – коэффициент передачи; То =Т/(1 + Крс*Ксу*К*Кдс) – постоянная времени.
Для САР скорости с двигателем А – звеном переходная характеристика определяется выражением
h(t) = Kо(1– е -t / Tо ).
Значения переходной характеристики определяются по точкам t = 0, t = To, t = 2To, t = 3To.
47

Для САР скорости с двигателем А – звеном при увеличении коэффициента Крс постоянная времени То уменьшается и следовательно время регулирования уменьшается, а быстродействие увеличивается.
При уменьшении коэффициента Крс постоянная времени То становится равной постоянной времени двигателя Т = Тм и следовательно время регулирования возрастает и быстродействие уменьшается. Время регулирования для САР скорости с двигателем А–звеном определяется tр = 3*То.
На рис. 19 представлены три вида переходных характеристик САР скорости, как апериодических первого порядка типовых звеньев при изменении коэффициента Крс.
h(t) |
|
|
Крс |
0 |
t |
Рис. 19. |
Переходные характеристики САР скорости |
На рис. 20 САР скорости включает ММ регулятора скорости Wрс(р), ММ системы управления Ксу, ММ датчика скорости Кдс и ММ ДПТ Wд(p), как колебательного звена (К
– звена).
|
|
Wрс(p) |
Wсу(p) |
|
|
Wд(p ) |
||
X |
|
|
|
|
|
|
Y |
|
Крс |
|
Ксу |
К / (Т² p² + 2 DoТ p + 1) |
|||||
_ |
|
|
|
|
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Кдс
Wдс(p)
Рис. 20. САР скорости
48
Для структурной схемы САР скорости с двигателем К – звеном ММ выражается
Wсар(p) = Ко / (Т²о p² + 2 DoоТо p + 1),
где Ко = Крс*Ксу*К/(1 + Крс*Ксу*К*Кдс) – коэффициент передачи; То = Т/√(1 + Крс*Ксу*К*Кдс) – постоянная времени; Dоo = Do/√(1 + Крс*Ксу*К*Кдс) – коэффициент демпфирования.
Для СХ САР скорости с двигателем К – звеном переходная характеристика определяется
-αt
h(t) = Ко ( 1 - K1 е sin ( β t + Ψ ).
Для САР скорости с двигателем К – звеном при увеличении коэффициента Крс уменьшается постоянная времени То и уменьшается коэффициент демпфирования Doo.
При уменьшении Крс значение постоянной времени системы То увеличивается и приближается к постоянной времени двигателя Т, а коэффициент демпфирования Doo системы – к коэффициенту демпфирования двигателя Do.
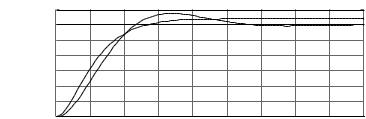
На рис. 21 представлены два вида переходных характе-
ристик САР |
скорости: 1 – при уменьшенном коэффици- |
енте Doo ( с |
колебаниями) и 2 – при увеличенном коэффи- |
циенте демпфирования Doo (отсутствие колебаний).
h(t) |
|
2 |
1 |
0 |
t |
Рис. 21 Два вида переходных характеристик |
|
49

Существующие зависимости колебательности, времени регулирования и времени нарастания по переходной характеристике от коэффициента передачи регулятора Крс представлены на рис. 22. Существующие зависимости максимального значения скорости переходной характеристики и времени спада представлены на рисунке 23.
tp |
tн = F(Крс) |
|
σ = F(Крс) |
tн |
|
|
|
|
|
|
|
σ |
|
|
|
tp = F(Крс)
Крс
Рис. 22. Зависимости параметров качества по переходной характеристике
tcп |
tcп = F(Крс) |
dhm/dt |
|
dhm/dt = F(Крс)
Крс
Рис. 23. Зависимости параметров качества по скорости переходной характеристики
50