

Лабораторный практикум по теории механизмов и робототехнике
..pdfЛабораторная работа № 3 Построение эвольвентных профилей зубьев методом обкатки (огибания)
Заданные величины:
1. |
Модуль m (мм) = |
. |
|
2. |
Диаметр делительной окружности d = |
, |
|
радиус r = d/2 =
3. Угол профиля рейки α = 20°.
Расчет основных параметров колес: (приведенные в таблице формулы
составлены с учетом коэффициента высоты головки зуба h* = 1 и коэффициента |
|||||
радиальногозазораС* = 0,25, zmin=17): |
|
a |
|
||
|
|
|
|||
|
Формулы |
Сравнение парамет- |
|||
Определяемые |
|
|
|||
|
|
||||
для нулевого |
дляисправленно- |
ров (указать <, >, =) |
|||
величины |
|||||
|
колеса |
го колеса |
|
|
|
|
Нулевое |
Исправл. |
|||
|
|
|
|||
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
|
Число зубцов коле- |
z = d/m = |
z = d/m = |
|
|
|
са |
|
|
|
|
|
Минимальное |
|
bmin=mh* (17–z)/17 |
х = 0 |
х ≠ 0 |
|
абсолютное |
|
a |
|
|
|
|
|
|
|
||
смещение рейки |
|
|
|
|
|
Принятое смеще- |
b = 0 |
b ≥ bmin; b = |
b = 0 |
b ≠ 0 |
|
ние рейки |
|
|
|
|
|
Окружной стан- |
pα = πm = |
pα = πm = |
pα |
pα |
|
дартный шаг |
|
|
|
|
|
Радиус основной |
rb = rcosα = |
rb = rcosα = |
rb |
rb |
|
окружности |
|
|
|
|
|
Толщина зуба по |
S = pα/2 = |
S = pα/2 + 2btgα = |
S |
S |
|
делительной ок- |
|
|
|
|
|
ружности |
|
|
|
|
|
Высота головки зу- |
ha = m = |
ha = m + b = |
ha |
ha |
|
ба |
|
|
|
|
|
Высота ножки зуба |
hf = 1,25 m = |
hf = 1,25 m–b = |
hf |
hf |
|
Радиус вершин |
ra = r + ha = |
ra = r + ha = |
rа |
rа |
|
Радиус окружности |
rf = r – hf = |
rf = r – hf = |
rf |
rf |
|
впадин |
|
|
|
|
|
Произвольный ра- |
ra = |
ra = |
rа |
rа |
|
диус. Выбратьrа |
|
|
|
|
|
|
|
|
|
121 |
|
Окончание таблицы
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
4 |
5 |
|||
Угол αа |
|
|
|
|
αа = |
|
|
|
|
α′ |
= |
|
|
|
α |
α′ |
|||||||
|
|
|
|
|
|
|
r |
|
|
|
|
|
a |
|
|
rb |
|
|
а |
a |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
= arccos |
b |
= |
= arccos |
= |
|
|
|||||||||||||||
|
|
|
|
|
|
|
ra |
|
|
|
|
|
|
r |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|||
Толщина зуба |
|
S |
a |
= d |
a |
[ |
π |
|
− |
|
S′ |
= d |
a |
[ |
π |
|
− |
|
Sa |
S'a |
|||
2z |
2z |
||||||||||||||||||||||
по окружности вер- |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|||||||||
шин |
|
−(invαa −invα)] = |
−(invαa −invα)] = |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Толщина зуба, |
|
|
|
|
S = |
|
|
|
|
S' = |
|
|
|
|
|
||||||||
измеренная на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полученной схеме |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
по делительной ок- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ружности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Толщина зуба, |
|
|
|
|
Sa = |
|
|
|
|
Sa′ = |
|
|
|
|
|
||||||||
измеренная по |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
окружности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выступов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
inv α = tg α – α = |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
||
inv αa = tg αa – α a = |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
α, рад, где α = 20°. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Контрольные вопросы
1.Методы изготовления зубчатых колес.
2.Основные особенности нулевых колес. Как должен располагаться режущий инструмент при их изготовлении? Суть явления подрезания ножки зуба.
3.Основные особенности исправленных колес. Каково расположение режущего инструмента при их изготовлении?
4.Основные параметры зубчатых колес: шаг, модуль, делительная, основная и начальная окружности; угол профиля зуба.
5.Формулы (записать), по которым рассчитывают основные параметры нулевых колес: шаг, радиусы делительной и основной окружностей, высоту головки и ножки, толщину зуба и ширину впадины на делительной окружности, радиусы окружностей вершин и впадин.
6.Как изменяются основные параметры нулевых колес при смещении режущего инструмента?
7.Как определяется величина минимального смещения рейки?
8.Что обозначает inv α?
Работу принял___________________
122
Лабораторная работа № 4 Кинематическое исследование плоских кулачковых механизмов
Определение перемещения ведомого звена
Тип кулачкового механизма___________________________
Результаты измерения параметров _______________________
Номер замера |
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
Угол поворота кулач- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ка φ0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Перемещение ве- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
домого звена S, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(метод положений) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
То же S, мм (метод об- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ращенного движения) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Средние величины пе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ремещения Sc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приращение пере- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мещений ∆Sc, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналоги скорости ве- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
домого звена, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vφ, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фазовые углы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание таблицы |
||||
Номер замера |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
φ0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆Sc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vφ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фазовые углы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
123
Фазовые углы φyд = ; φсб = ; φб.с = . Средние величины перемещений
Sc = 12 (S + Si).
Приращения перемещений
∆Sci = Sci – Sc(i-1),
где i – номер замера, i = 1, 2, 3...
Аналоги средних скоростей на участках ∆φ вычислять по формуле
Vϕi = ∆∆Sϕci ,
где ∆φ – приращение угла поворота кулачка, рад.
В нижней строке таблицы указать фазовые углы φуд, φсб, φб.с, выделив их зоны.
ПостроитьграфикVφ = Vφ (φ), ординатыVφi строитьизсерединыучастков∆φ.
Графики S = S (φ), Vφ = Vφ (φ):
S, Vφ
φ
124
Схема построения кулачкового механизма
Контрольные вопросы
1.Кулачковые механизмы. Их преимущества и недостатки.
2.Основные параметры кулачкового механизма: ход ведомого звена, фазовые углы, профильные углы, минимальный радиус, смещение.
3.Рабочий процесс кулачкового механизма.
4.Каковы экспериментальные методы определения перемещения ведомого звена?
5.Аналог скорости. Как определить скорость по известному аналогу?
Работу принял____________________
125
Лабораторная работа № 5 Статическое уравновешивание вращающихся масс
Заданные величины:
Массы дебалансирую- |
Радиусы центров масс |
Углы, определяющие по- |
||||||||
|
щих грузов, г |
|
дебаланс. грузов, мм |
ложения радиусов |
||||||
|
|
|
|
|
|
|
|
|
|
|
M1 |
|
М2 |
|
М3 |
r1 |
r2 |
r3 |
α1 |
α2 |
α3 |
|
|
|
|
|
|
|
|
|
|
|
Вычисленные параметры:
Статические моменты |
Принятая масса |
Радиус |
Угол радиуса |
|||
|
масс, г-мм |
|
противовеса тп |
противовеса |
противовеса |
|
m |
m |
m |
mn |
|
rп |
αп |
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
Расчет параметров противовеса:
1.∑miri =m1r1 +m2r2 +m3r3 +mпrп = 0 ;
∑Mi = ∑miri = M1 + M2 + M3 + Mп = 0 .
2.В проекциях на оси X, Y
M |
1 |
cos α + M |
2 |
cos α |
2 |
+ M |
3 |
cos α |
3 |
+ |
|||||
|
1 |
|
|
|
|
|
|
|
|
|
|||||
+ Mп cos αп = 0 ; |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M sinα + M |
2 |
sin α |
2 |
+ M |
3 |
sin α |
3 |
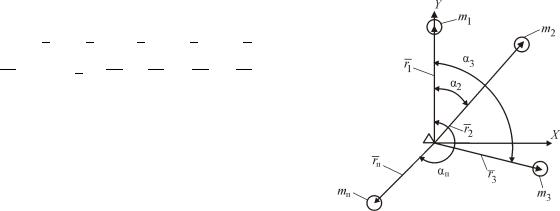
+ |
Рис. К расчету параметров |
||||||
|
1 |
1 |
|
|
|
|
|
|
|
|
противовеса |
||||
+ M sin α = 0 .
п п
3.A + Mп cosαп = 0 ;В+ Мп sin αп = 0 .
126

А= M1+ М2 cos α2 + M3 cos α3 =
В= М2 sin α2 + М3 sin α3 =
Мп =  А2 + В2 =
А2 + В2 =
rп = Мп = mп
Массой противовеса тп задаемся:
4. tgαп = |
В |
αп = arctg |
B |
+ kπ при |
k =1; |
||
А, |
A |
||||||
αп = arctg |
B |
+180 |
o |
= |
|
|
. |
A |
|
|
|
||||
Схема расположения масс:
.
.
.
.
127
Контрольные вопросы
1.Уравновешивание (балансировка) и его задачи.
2.Как вычисляется сила инерции и момент сил инерции?
3.Причины возникновения сил инерции и момента сил инерции у вращающихся тел.
4.В чем заключается статическое уравновешивание?
5.Методы статического уравновешивания.
6.Последовательность статического уравновешивания экспериментальным методом.
7.Последовательность статического уравновешивания расчетным методом.
8.Какие детали достаточно уравновешивать только статически?
Работу принял _______________________________________________
128
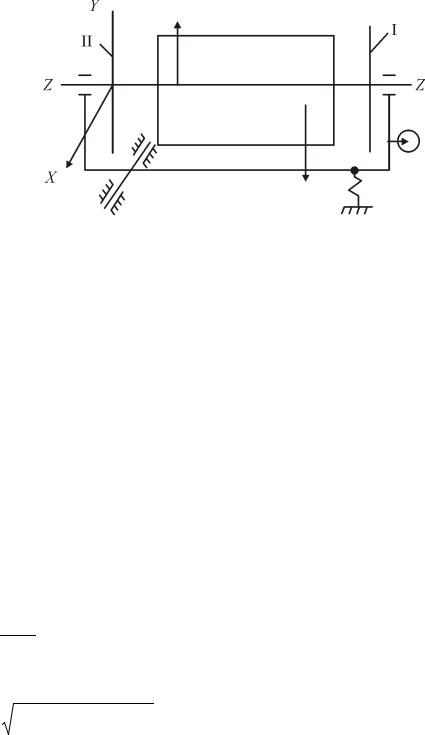
Лабораторная работа № 6 Моментное уравновешивание вращающихся тел
Схема балансировочного станка конструкции Б.В. Шитикова:
Параметры дополнительного груза: |
|
|
|
||||
массаmд = |
|
г, |
|
|
|
||
радиус rд = |
|
мм. |
|
|
|
||
Величины амплитуд неуравновешенного ротора: |
|
|
|||||
|
|
|
|
|
|
|
|
Аi |
|
|
|
Замеры амплитуд |
|
|
|
|
1 |
2 |
|
3 |
4 |
… |
Ас |
A1 |
|
|
|
|
|
|
|
А2 |
|
|
|
|
|
|
|
А3 |
|
|
|
|
|
|
|
Ас – средняя величина амплитуд A1, A2 ,A3;
Ас = ∑nАi .
Амплитуда дополнительного груза
А = |
0,5(А2 |
+ А2 ) − А2 |
= |
. |
|
д |
2 |
3 |
1 |
|
|
129
Расчет угла установки корректирующей массы груза:
|
|
A2 |
+ A2 |
− A2 |
|
|
|
|
|
|
|
|
1 |
д |
2 |
|
|
|
|
|
|
αп = arccos |
|
|
|
. |
|
|
|
|
||
|
2А1Ад |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
Определение коэффициента пропорциональности: |
|
|||||||||
А |
= km r ; |
|
|
|
k = |
Aд |
= |
1/ г; |
||
|
|
|
|
|||||||
д |
д д |
|
|
|
|
mдrд |
|
|||
|
|
|
|
|
|
|
||||
А = km r ; |
|
|
|
m r = |
A1 |
= |
г мм. |
|||
|
|
|
|
|||||||
1 |
п п |
|
|
|
п п |
k |
|
|||
Параметры противовеса и величины остаточной амплитуды:
Масса |
Радиус |
Остаточные амплитуды Ао при различных |
|||
противовеса |
установки |
|
углах установки противовеса |
||
тп, г |
противовеса |
|
|
|
|
|
rп, мм |
|
|
|
|
|
+αп = |
–αп = |
180 – αп = |
180 + αп = |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Расчет остаточного статического момента m0r0 дебалансирующего ротора:
А |
= km r ; |
m r |
= |
A0 |
= |
г мм. |
|
k |
|||||||
0 |
0 0 |
0 0 |
|
|
|
130