

Автоматизированный лабораторный комплекс ТМл-18 «Двойной маятник» (96
..pdfМосковский государственный технический университет имени Н.Э. Баумана
В.В. Дубинин, Ю.Н. Жигулевцев
Автоматизированный лабораторный комплекс ТМл-18 «Двойной маятник»
Методические указания к лабораторной работе по курсу «Теоретическая механика»
Москва Издательство МГТУ им. Н.Э. Баумана
2006
УДК 531.5 ББК 22.21
Д79
Рецензент А.В. Копаев
Дубинин В.В., Жигулевцев Ю.Н.
Д79 Автоматизированный лабораторный комплекс ТМл-18 «Двойной маятник»: Метод. указания к лабораторной работе по курсу «Теоретическая механика». – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 18 с.: ил.
Методические указания содержат теоретические сведения, описание схемы лабораторного комплекса, описание эксперимента и обработки полученных данных.
Для студентов всех специальностей.
Ил. 12.
УДК 531.5 ББК 22.21
Методическое издание
Владимир Валентинович Дубинин Юрий Николаевич Жигулевцев
Автоматизированный лабораторный комплекс ТМл-18 «Двойной маятник»
Редактор Е.К. Кошелева Корректор Л.И. Малютина
Компьютерная верстка Е.В. Зимакова
Подписано в печать 29.09.2006. Формат 60х84/16. Бумага офсетная.
Печ. л. 1,25. Усл. печ. л. 1,05. Уч.-изд. л. 0.95. Тираж 200 экз.
Изд № 73. Заказ
Издательство МГТУ им. Н.Э. Баумана. 105005, Москва, 2-я Бауманская, 5.
© МГТУ им. Н.Э. Баумана, 2006
1. НАЗНАЧЕНИЕ И СОСТАВ ЛАБОРАТОРНОГО КОМПЛЕКСА
Автоматизированный лабораторный комплекс ТМл-18 предназначен для экспериментального и теоретического исследования колебаний парциальных систем и главных колебаний двойного маятника. Лабораторный комплекс позволяет экспериментально определить основные параметры колебательной системы, а затем, построив математическую модель, сравнить результаты экспериментального исследования главных колебаний системы с данными, полученными при математическом моделировании.
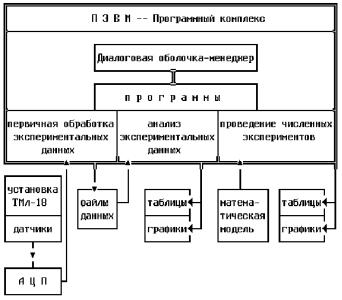
Автоматизированный лабораторный комплекс ТМл-18 состоит из прибора ТМл-18, аналого-цифрового преобразователя (АЦП), ПЭВМ типа IBM PC и программного комплекса. Программаменеджер обеспечивает согласованное взаимодействие всех компонентов лабораторного комплекса (рис. 1).
Рис. 1. Блок-схема лабораторного комплекса
3
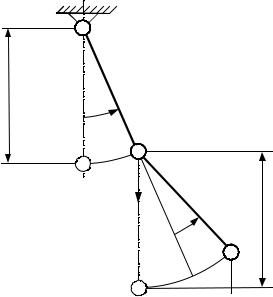
В модели двойного маятника (рис. 2) однородный стержень О1А прикреплен к неподвижному основанию с помощью шарнирного узла О1, имеющего горизонтальную ось. На нижнем конце стержня О1А закреплен шарнирный узел О2, имеющий ось, параллельную оси шарнирного узла О1. К нижнему концу стержня O2B прикреплен груз В. В шарнирных узлах О1 и О2 расположены датчики, фиксирующие углы отклонения стержней О1А и О2В – α1 и α2 соответственно.
O1
l1 |
α1 |
|
A O2 |
|
|
P1 |
l2 |
|
α2 |
||
|
||
|
B |
P2 
Рис. 2. Модель двойного маятника
Угол α1 является абсолютным углом отклонения стержня О1А от вертикали, а угол α2 – относительный угол, т. е. угол поворота стержня О2В вокруг оси шарнира О2 относительно стержня О1А.
В качестве чувствительного элемента в датчиках применены потенциометры, которые питаются от АЦП постоянным напряжением ±5 В.
4
2. СОСТАВЛЕНИЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ДВИЖЕНИЯ
Чтобы записать дифференциальные уравнения движения, сначала необходимо принять физическую модель системы (см. рис. 2). В качестве такой модели выберем систему твердых тел, соединенных между собой цилиндрическим шарниром О2. Будем считать, что стержни О1А и О2В имеют длины l1 и l2 соответственно и являются невесомыми, а шарнирный узел О2 и груз В – точечные массы, m1 и m2. Трением в шарнирах О1 и О2 и сопротивлением воздуха пренебрегаем. На рис. 2 показаны силы тяжести P1 и P2, равные m1g и m2g соответственно (g – ускорение свободного падения).
Для составления дифференциальных уравнений движения механической системы воспользуемся уравнениями Лагранжа второго рода.
Полагая углы α1 и α2 малыми, выражения для кинетической T и потенциальной П энергий системы можно записать следующим образом:
Т = |
|
1 |
m l2α |
2 |
+ |
1 |
m |
l |
|
+l |
α |
+α |
|
l 2 |
, |
(1) |
|||||||
|
|
|
|
|
|
2 |
|||||||||||||||||
|
2 |
1 1 1 |
|
2 |
2 |
( |
1 |
|
|
2 ) 1 |
|
|
|
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
П = |
1 |
|
(m1 +m2 ) gl1α12 + |
|
1 |
m2 gl2 (α1 +α2 )2 . |
(2) |
||||||||||||||||
2 |
|
|
2 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Введем обозначения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
β= |
l1 |
|
, |
|
γ = |
m1 |
|
, |
|
n2 = |
g |
. |
|
|
|
|||||
|
|
|
l |
|
m |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
||||
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|||
С учетом принятых обозначений дифференциальные уравнения движения можно представить так:
( |
) |
|
|
1 |
|
( |
) |
α |
2 |
( |
) |
n |
|
1 |
|
n |
|
2 |
|
|
γ+1 |
β2 |
+2β+1 |
α |
+ |
|
β+1 |
|
+ |
γ +1 |
β+1 |
2α |
|
+ |
|
2α |
|
= 0, |
|
|
|
|
(β+1)α1 +α2 +n2α1 +n2α2 =0. |
|
|
|
|
|
|
(3) |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
Сложность аналитического решения системы дифференциальных уравнений (3) обусловлена тем, что прибор ТМл-18 является неразборным, и поэтому нельзя измерить значения масс m1 и m2, которыми определяются значения коэффициента γ.
5

Коэффициент n определяет вторую (высшую) парциальную частоту системы – n2. Значение этой частоты можно найти экспериментально, закрепив стержень О1А. Значение первой (низшей) парциальной частоты n1 также можно определить экспериментально. Для этого достаточно исследовать колебания системы, в которой оба стержня жестко скреплены между собой, т. е. расчетную схему для этого случая можно представить в виде невесомого стержня О1В, на котором закреплены точечные грузы А и В. Таким образом, имеется возможность измерить длины l1 и l2 и экспериментально определить значения частот n1 и n2.
Введем еще один коэффициент, учитывающий отношение парциальных частот, – θ = (n1/n2)2.
Тогда коэффициент γ можно определить как
γ = |
θ(1+ 2β+β2 ) −β−1 |
. |
(4) |
|
|||
|
β(1−θβ) |
|
|
Итак, имеется возможность экспериментально-аналитическим способом определить коэффициенты системы дифференциальных уравнений:
a =(γ +1)β2 |
+ 2β+1, |
c11 |
= (γ+1)β+1 n2, |
|
11 |
|
|
|
|
a12 = a21 =(β+1), |
c12 |
=c21 = n2 , |
(5) |
|
a22 =1, |
|
c22 = n2. |
|
|
Учитывая введенные обозначения, собственные частоты ω1 и ω2 системы можно определить по формуле
|
|
|
|
ω1, 2 = |
A ± |
A2 − B , |
|
|
|
(6) |
||
где |
|
|
|
|
|
|
|
c c −c2 |
|
|||
|
c a +c a −2c a |
|
|
|||||||||
|
11 |
22 |
22 |
11 |
12 |
12 |
11 |
22 |
12 |
|
|
|
A = |
|
|
|
|
|
, B = |
|
. |
(7) |
|||
|
2 |
(a11a22 −a122 |
) |
|
a11a22 −a122 |
|||||||
После того как будут найдены собственные частоты, определить коэффициенты распределения амплитуд:
ηi |
= − |
c11 |
−a11 |
ωi2 |
, |
i =1, 2. |
|
c12 |
−a12 ωi2 |
||||||
|
|
|
|
||||
можно
(8)
6
Общее решение системы дифференциальных уравнений (3):
α1(t) =C1sin (ω1t +ψ1) +C2 sin ( |
ω2t +ψ2 ), |
(9) |
||
α2(t) =η1C1sin (ω1t +ψ1) |
+η2C 2 sin (ω2t + |
|||
ψ2 ). |
||||
Коэффициенты C1, C2, ψ1 и ψ2 определяют из начальных усло- |
||||
вий: |
|
|
|
|
при t = 0 |
|
|
|
|
α1 = α10 , α2 =α20 |
, |
(10) |
||
α1 =α10 , α |
=α20 . |
|||
|
||||
|
2 |
|
|
|
3. ПРОВЕДЕНИЕ ЭКСПЕРИМЕНТА И ОБРАБОТКА ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
3.1.Включение и запуск комплекса
Спомощью кабеля, входящего в комплект установки ТМл-18, следует подключить датчики углов поворота стержней маятника к АЦП, размещенному в компьютере. При этом компьютер должен быть выключен из сети.
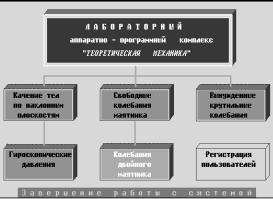
Затем надо включить компьютер и запустить файл astart.bat. На экране появится главное меню компьютерной системы (рис. 3).
Вглавном меню следует войти в раздел «Колебания двойного маятника».
Рис. 3. Главное меню компьютерной системы
7
Эксперимент должен проводиться в два этапа. На первом этапе нужно будет зафиксировать колебания двух парциальных систем – каждой по отдельности. После этого по полученным графикам парциальных колебаний системы требуется рассчитать парциальные частоты, измерить длины маятников и перейти ко второму этапу – исследованию главных колебаний.
3.2. Исследование парциальных систем
Исследование первой парциальной системы
Результатом экспериментального исследования должна быть частота колебаний первой парциальной системы.
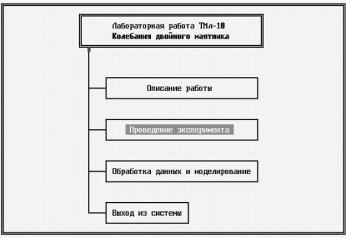
Рис. 4. Подменю лабораторной работы
В подменю лабораторной работы следует войти в раздел «Проведение эксперимента» (рис. 4). При этом запустится программа, обеспечивающая проведение физического эксперимента. После запуска программы необходимо:
а) ввести имя файла, в котором будут размещены данные, полученные экспериментально;
б) задать временной интервал между измерениями угла поворота стержня маятника и ввести интервал времени проведения эксперимента;
8
в) протарировать датчики углов поворота маятников. Для этого следует груз А установить на верхний левый фиксатор, а груз В – на нижний правый фиксатор и зафиксировать это положение. Затем надо вернуть стержни в вертикальное положение и также зафиксировать это положение;
г) после проведения тарировки необходимо скрепить между собой стрежни О1А и О2В с помощью специального приспособления, входящего в комплект поставки установки;
д) установить груз А на левый верхний фиксатор, при этом оба стержня окажутся повернутыми на одинаковый угол;
е) нажать на клавиатуре клавишу «Пробел» и отключить фиксатор – данные, снимаемые с датчиков, будут записаны в файле под указанным вами именем; после окончания записи колебаний первой парциальной системы программа вернется к пункту меню «Проведение эксперимента» (см. рис. 4);
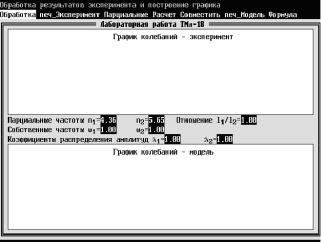
ж) обработать полученные данные. Для этого в подменю лабораторной работы необходимо войти в раздел «Обработка данных и моделирование». Диалоговая панель этого раздела имеет два окна для вывода графиков колебаний реального маятника и математической модели (рис. 5);
Рис. 5. Диалоговая панель парциальных систем
з) в меню этого раздела выбрать пункт «Обработка». При запуске этого режима система запросит имя файла с эксперимен-
9
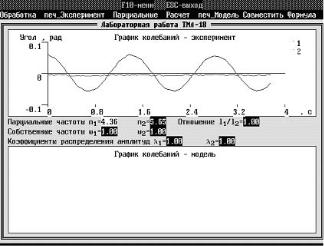
тальными данными, начальное значение угла отклонения и значение временного интервала записи колебаний маятника (значение этого интервала может быть и меньше интервала записи). После ввода этих данных запустится процедура обработки экспериментальных данных и построения графика, который будет выведен в верхнем окне панели. Полученный график следует распечатать, выбрав пункт меню «печ_Эксперимент» (рис. 6).
Рис. 6. Колебания первой парциальной системы. Экспериментальные кривые
Распечатанный график подлежит обработке для получения первой парциальной частоты.
Исследование второй парциальной системы
Результатом экспериментального исследования должна быть частота колебаний второй парциальной системы.
В подменю лабораторной работы следует войти в раздел «Проведение эксперимента» (см. рис. 4). При этом запустится программа, обеспечивающая проведение физического эксперимента. После запуска программы необходимо:
а) ввести имя файла, в котором будут размещены данные, полученные экспериментально;
б) задать временной интервал между измерениями угла поворота стержня маятника и ввести интервал времени проведения эксперимента;
10