

Лекция № 10
ФФП – формирователи функции приоритета
УВК с max приоритетом - устройство выбора канала с мах приоритетом
Уровень квантования взят с запасом. Шаг дискретизации выбирается, исходя из наиболее высокочастотного компонента
ФФП формируют приоритет в каждом канале (берут разность между переданным в предыдущий момент времени и текущим значением, если разность больше, чем у остальных, то передаем)
Р ешение
осуществляется в тактовые моменты.
ешение
осуществляется в тактовые моменты.
Уменьшается избыточность малоинформационного параметра S2 через интервал То производится проверка фронта.
ω1i≈2πf1i
!!!
![]() - частота вывода(с ее помощью выбирается
скорость передачи информации)
- частота вывода(с ее помощью выбирается
скорость передачи информации)
На частоту вывода влияет также дисперсия передаваемого процесса.
λi![]() Δ
– среднее значение функции приоритета
Δ
– среднее значение функции приоритета
Э тот
адаптивный коммутатор строго эквивалентен
с точки зренияFb
следующй системе:
тот
адаптивный коммутатор строго эквивалентен
с точки зренияFb
следующй системе:
(+) нет физической задержки в передаче в данном АК, по сравнению с БЗУ.
Адресная информация должна быть, а дополнительная информация о задержке не требуется, т.к. ее нет.
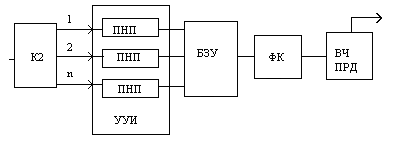
Билет № 9. Структурная схема РТС с опертурным уменьшением избыточности
Передающая
часть
УКЗ – устройство контроля заполнения БЗУ
К – коммутатор
БЗУ – буферное запоминающее устройство
УУИ – устройство уменьшения избыточности
УУС – устройство управления синхронизацией
ФК – формирователь кадра
ПНП – предсказатель нулевого порядка
К1 осуществляет опрос источников информации с заведомо завышенной частотой. АЦП осуществляет квантование по уровню с шагом меньшим требуемого. УУИ осуществляет исключение избыточных отсчетов с помощью ПНП с фиксированной или плавающей апертурой.

Поток существенных отсчетов представляет собой существенно случайный поток. Чтобы убрать случайную передачу выравнивается случайный поток ставится буфер, который опрашивается с частотой Ro, To.
Техническая скорость передачи равна: nFo
Rт = nFo
Tопр – временная дискретизация
Т – интервал между существенными отсчетами
То – интервал передачи
Характеристики адаптивной РТС с аппертурным методом уменьшения избыточности.
Определение коэффициента сжатия.
Коэффициент сжатия по выбору Кв, определяется отклонением частоты выборок в системе без сжатия к частоте существенных отсчетов в системе с сжатием.
+ не учитываются дополнительная служебная информация, которую необходимо передавать в системе сжатия (например задержка)
Коэффициент сжатия по полосе частот Кс, который определяется как отношение количества двоичных единиц в единицах времени переданных в системе без сжатия к количеству двоичных единиц в единицу времени в системе с сжатием.
Кв > Кf
Количество переданных двоичных единиц равна технической скорости передачи
Rт≈Δfc≈Δfэ
П
 о
энергии сигнала ( по пороговому сигналу)
Это отклонение энергии, необходимо
для передачи одного отсчета в системе
без сжатия к энергии необходимой для
передачи одного отсчета в системе с
сжатием при одинаковой достоверности
передачи измерительной информации.
о
энергии сигнала ( по пороговому сигналу)
Это отклонение энергии, необходимо
для передачи одного отсчета в системе
без сжатия к энергии необходимой для
передачи одного отсчета в системе с
сжатием при одинаковой достоверности
передачи измерительной информации.
Избыточные отсчеты могут быть использованы приемной частью для исключения сбоев (в системе без сжатия)
Билет № 10. Интенсивность существующих отчетов
Интервал времени между отсчетами существенно случайная величина поэтому интенсивность существенных отсчетов λ, в принципе это средняя частота существенных отсчетов, и ее можно определить как:
λ=Fопр(1-Р)
Р – вероятность того, что отсчет будет несущественный
Р
=
![]() ,l
– число уровней квантования
,l
– число уровней квантования
Pi – вероятность того, что отсчет будет несущественный в i-ой апертуре.

Задача и сводится к определению Рi. Надо определить функции распределения W(X,X1), W(X1)
Будем полагать, что исходный измеряемый процесс имеет гауссовское распределение с дисперсией δ2с и нулевым средним.
ЛЕКЦИЯ №5
Мы полагаем, что исходные входные сигналы относятся к гауссовским. Перед нами стоит задача определения вероятности того, что отсчет Хi будет избыточным.
Если исходный процесс имеет нормальное распределение, то распределение величин Хi будет тоже нормальным.
W(X/X1)
=
![]() *
exp
-
*
exp
-
![]() - условное распределение случайного
отсчета Х
- условное распределение случайного
отсчета Х
R(Tопр) – условное среднее
δ2 =δ2 с[1-R2(Топр)] – дисперсия
Распределение величины X1 – гауссовское
W(X1)
=
Т.о. вероятность того, что в i-ой апертуре отсчет будет избыточным(отсчет Xi пойдет в i-ю апертуру.
Pi
=
![]()
Кроме этого, можно полагать, что Δ/δс<<1
![]() - в одну из апертур
отчет обязательно покажет)
- в одну из апертур
отчет обязательно покажет)
С учетом этого получаем, что интенсивность существенных отчетов, равная
λ= (1)
(1)
ω1 – среднеквадратическая ширина спектра
S(ω) – спектр мощности
ω12=
-R``(0)=![]()

Если
![]()
![]() (3) из свойств вероятности, то интенсивность
существенных отсчетов определяется:
(3) из свойств вероятности, то интенсивность
существенных отсчетов определяется:
![]() (2)
(2)
![]()
![]()
Сжатие имеет смысл только тогда, когда Топр завышено. Вопрос в том, насколько нужно ее зависеть

Для высокой точности наша частота опроса должна быть:
Топр![]()
2πFm
![]() ω;
ω;
В этом случае обеспечивается приемная точность восстановления
Поэтому мы понимаем, что наше предположение будет верно.
Если частота опроса не зависима, то это выражение выполняется и устройство сжатия не работает. В этом случае возникает зависимость от Топр интенсивности существенных отсчетов.
Когда Топр завышено и происходит эффективное сжатие, то нет зависимости от Топр.
Следует понимать, что реально сжатие осуществляется в том случае, если частота опроса существенно завышена и превышает среднеквадратическую ширину спектра на два порядка и более. В этом случае интенсивность существенных отсчетов определяется выражением (2), т.е. среднеквадратичной шириной спектра, дисперсией и апертурным уменьшением избыточности.
Если условие (3) не выполняется, а это значит, что частота опроса сравнена со среднеквадратической шириной спектра или даже меньше, то интенсивность существенных отсчетов определяется выражением (1) и зависит еще от частоты опроса, т.е. в этом случае принципиально(практически) уменьшения избыточности не происходит, сжатия нет.
Билет № 11. Системы синхронизации
Задачи системы синхронизации.
Задачей системы синхронизации является:
Формирование ансамбля сигналов, необходимых для передачи информации от источников информации к различным потребителям информации. Эту задачу решает система сбора информации и система передачи информации. Т.о. передающую часть системы синхронизации практически невозможно отделить от системы сбора и передачи информации. Т.о. система формирования и передачи сигналов одновременно является системой формирования сигналов синхронизации. Приемная часть выделяет сигналы синхронизации. В передатчике есть генератор несущей частоты. fo – несущая частота.
Первый уровень синхронизации: формирование несущей и выражение ее в приемнике
Элементная синхронизация (тактовая) fт – тактовая частота. В приемной части задается тактовая частота кfт = fo
Канальная частота fк или частота следования слов задается системой сбора (например в коммутаторе)
Кадровая частота Fo(Tк)
3) и 4) – групповая синхронизация (блоковая синхронизация)
Принципиально синхронизацию по несущей можно отнести к элементной.
Вторая часть системы синхронизируемая часть, задача которой - выделение сигналов синхронизации.
Задачи синхронизации всегда неразрывно связаны с задачами формирования, выделение и приема сигналов.
В многоканальных системах задачи синхронизации более сложные вследствие того, что возрастает размер ансамбля сигналов по сравнению с одноканальной системой. В многоканальной системе вследствие различия источников информации возникают подуровни сигналов групповой синхронизации.
Системы синхронизации цифровых РТС передающая/приемная часть
Синхронизация РТС с ВИМ передающая/приемная часть
Билет № 12. Характеристики БЗУ
Вероятность холостого хода БЗУ (вероятность опустошения БЗУ)
Закон Пуассона:
Р(К,
То) =
![]()
Вероятность того, что за интервал времени То произойдет k отсчетов.
Исходный процесс случайный, используем ПНП преобразователь.
Вероятность того, что БЗУ перейдет из нулевого состояния в i:
Роj
=![]()
Вероятность того, что БЗУ будет за один такт переполнено:
РON=![]()
Pij=![]()
При записи этих выражений мы учитываем, что за такт передачи выводится один отсчет
Вероятность, когда переполнение происходит не от нуля
PiN=
![]()

Следует иметь в виду, что Pij = 0, если i>j+1
Можно использовать выражение для односвязного Марковского процесса, в котором каждое
Рj=![]()
Последующее состояние зависит только от предыдущего. Используя эти выражения и условие нормированности: Ро+Р1+…+Pn=1, можно записать систему линейных уравнений:
![]()
 Ро
=(Ро+Р1)е-λТо
Ро
=(Ро+Р1)е-λТо
*
*
*
PN =
которая решается рекуррентно, т.е. выражением с вероятностью с большими номерами через выражение с вероятностью с меньшим номером.
В итоге получаем выражение:
![]()
![]()
q=λTo – коэффициент загрузки БЗУ