

Общее представление о схеме управления (рис.1)
Схема управления состоит из широтно−импульсного модулятора (ШИМ) и канала усиления разницы Uε между напряжениями задания Uзад и обратной связи Uос ; его называют каналом рассогласования .
В состав ШИМ входят генератор пилообразного напряжения (ГПН) (генератор «пилы») и пороговый элемент (ПЭ) . Диаграмма ,поясняющая работу ШИМ представлена на рис. 19 . У ПЭ два входа ; на один из них подается линейно нарастающее , в пределах периода T , напряжение Uп ,на другой − аналоговое напряжение Uс с выхода канала рассогласо − вания .
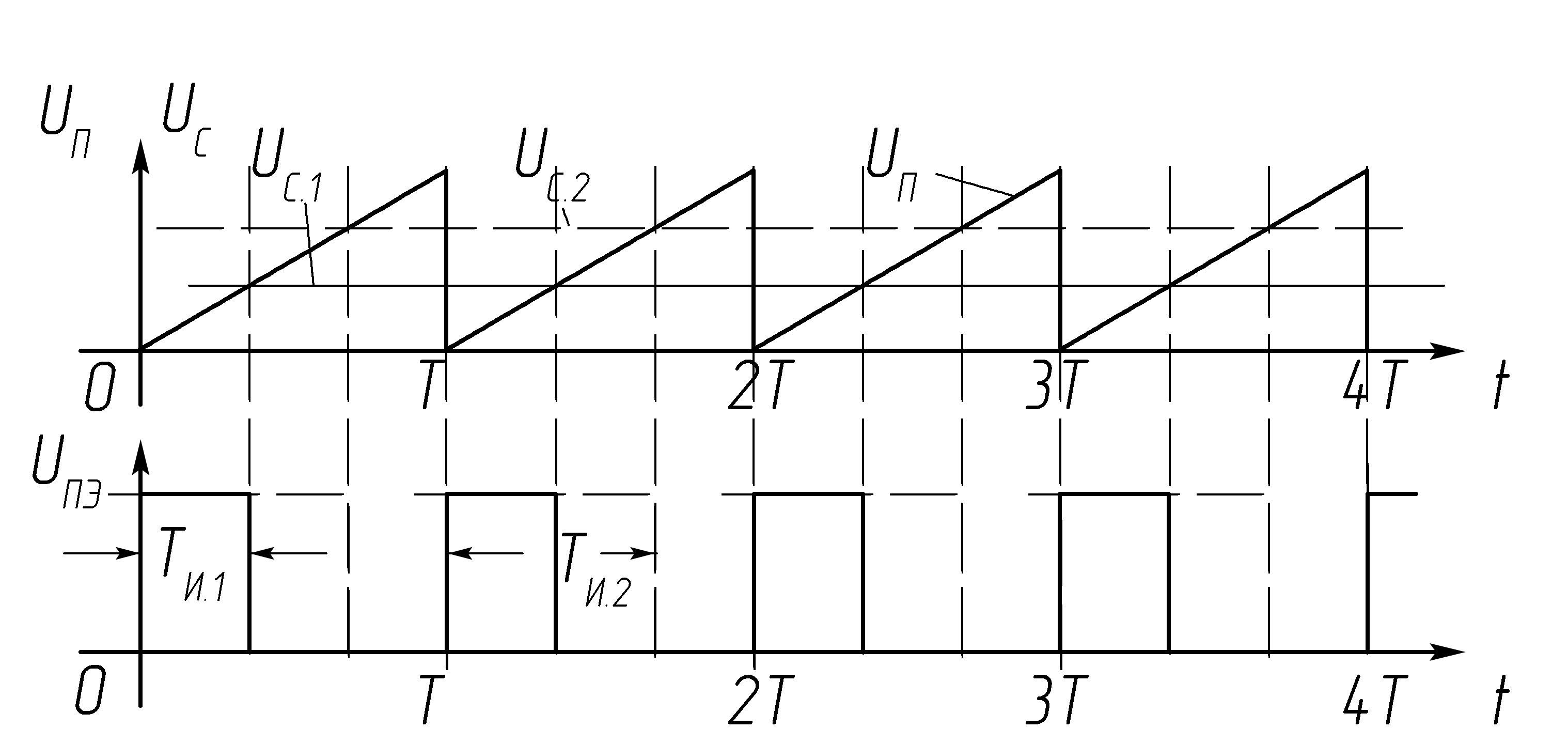
Рис. 19
Пока Uс больше Uп , напряжение Uпэ имеет высокий уровень ; в момент равенства Uп и Uс напряжение Uпэ скачком падает и остается равным нулю до конца периода «пилы» . В начале следующего периода Uпэ вновь скачком возрастает до некоторого постоянного уровня . Таким образом на выходе ПЭ формируется последовательность прямоугольных импульсов . Если величина Uс возрастает , то момент равенства Uп и Uс сдвигается вправо от начала периода «пилы» , соответственно длитель − ность импульсов Tи становится больше . Изменение Uс приводит к мо − дуляции (ширины) импульсов Uпэ .
Буферный каскад является связующим звеном между выходом ШИМ и входом силового триода . Если ТП построен на мощном би − полярном триоде , БПТ , то желательно , чтобы выходной сигнал БК был знакопеременным . Например , в интервале импульса Uупр > 0 , в интер − вале паузы Uупр < 0 (или наоборот , зависимости от типа проводимости БПТ) .
При знакопеременном сигнале на входе БПТ обеспечивается при − нудительное , ускоренное его выключение , снижаются динамические по − тери . Без принудительного выключения БПТ на высокой частоте нера − ботоспособны . Если ТП построен на основе группы параллельно сое − диненных триодов , то требуемая мощность сигнала Uупр может ока − заться заметной . Это следует учесть при разработке схемы БК .
Для управления ПТ MOSFET достаточно однополярного импульс − ного сигнала Uупр . Но и в этом случае приходится выбирать триоды БК по величине допустимого импульсного тока из − за емкостного харак − тера входной цепи ПТ . Буферный каскад может потребоваться и при использовании интегрального ШИМ−контроллера в качестве схемы управления силовым триодом .
Канал рассогласования состоит из схемы сравнения Uзад и Uос и усилителя разницы Uε = Uзад − Uос . Чем больше коэффициент усиления Ku усилителя , тем выше его чувствительность , тем выше точность с которой поддерживается заданный уровень напряжения или тока в на − грузке . Качество работы системы стабилизации системы стабилизации зависит не только от Ku , но и от закона , который реализуется в про − цессе работы системы , т.е. от закона регулирования .
Подробное описание принципов построения схем управления пре − образователями , методики расчетов и выбора элементов даны в при − веденном ниже библиографическом списке .
Схема управления разрабатывается самостоятельно .
Итогом курсового проектирования являются : 1 .Расчетно − поясни − тельная записка (РПЗ) . 2. Чертеж принципиальной схемы системы .
Проект защищается сообщением (докладом) .