

5331
.pdfОсновные выражения для расчёта трёхфазного асинхронного двигателя с короткозамкнутым ротором
Асинхронный двигатель является простейшей машиной из всех электрических машин. Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля и основных законов электротехники. Электрическая схема трёхфазного асинхронного двигателя представлена на рисунке 1.
У асинхронного двигателя на статоре расположена трёхфазная обмотка. При питании этой обмотки от трёхфазной сети она образует вращающееся магнитной поле, частота вращения которого, об./мин:
n |
60 f1 |
, |
|
||
1 |
p |
|
|
|
|
где f1 – частота тока питающей сети, f1 |
50 Гц; p – число пар полюсов |
|
обмотки статора.
В пазы ротора двигателя уложена короткозамкнутая обмотка, имеющая вид беличьего колеса. Обычно это медные или алюминиевые стержни в пазах ротора, замкнутые накоротко по концам кольцами из этого же металла.
Вращающееся поле статора пересекает обмотки статора и ротора, индуктируя в них ЭДС. В обмотке статора ЭДС – E1 , в обмотке ротора – E2 .
ЭДС ротора E2 создаёт в обмотке ток I2 , который, взаимодействуя с маг-
нитным потоком статора, создаёт вращающий электромагнитный момент M . Этот момент заставляет вращаться ротор в том же направлении, что и магнитное поле статора, но с меньшей скоростью. Отношение разности между частотой вращения магнитного поля статора и частотой вращения ротора машины переменного тока к частоте вращения магнитного поля (в процентах):
|
|
|
|
|
|
s |
|
n1 n2 |
100% , |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
n1 |
|
|
|
где |
n2 – частота вращения ротора, об./мин. |
|
|
||||||||
|
Критическое скольжение – это скольжение, при котором асинхронная |
||||||||||
машина |
развивает |
максимальный |
вращающий |
момент |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
sкр |
sном |
2 |
1 , где |
|
М макс / М ном – коэффициент, определяющий |
||||||
|
|
|
|||||||||
перегрузочную способность двигателя; sном – скольжение при номиналь-
ной нагрузке.
Частота вращения ротора n2 n1 1 s .
Активная мощность, потребляемая двигателем из сети
51
P |
3U |
ф |
I |
ф |
cos |
3P , |
1 |
|
|
|
Ф |
где U ф – фазное значение напряжения, В; Iф – фазное значение тока, А;
cos – угол сдвига фаз между током и напряжением (коэффициент мощности)
– угол сдвига фаз между током и напряжением (коэффициент мощности)
cos |
|
Pф |
|
. |
|||
Uф Iф |
|
||||||
|
|
|
|||||
Активная мощность генератора |
Pг |
Uг Iг , |
|||||
где Uг – напряжения на зажимах генератора, В; I г – тока генератора, А. |
|||||||
Полезная мощность на валу двигателя |
|
|
|||||
P2 |
|
Pг |
|
|
, |
||
пер |
г |
||||||
|
|
|
|||||
где пер – КПД передачи, пер 1; |
г – КПД генератора, г 0,8. |
||||||
КПД двигателя |
|
|
|
|
|
|
|
P2 .
P1
2. Задание
2.1. Под рабочими характеристиками асинхронного двигателя понимают зависимость n , S , cos , M , I , P1 ,  f P2 .
f P2 .
Для снятия рабочих характеристик необходимо собрать схему, представленную на рисунке 1.
В качестве механической нагрузки на двигатель служит генератор постоянного тока параллельного возбуждения, имеющий электрическую нагрузку – лампы накаливания. Первое измерение параметров двигателя и генератора сделать при холостом ходе, затем последующие – при изменении нагрузки.
Показания приборов записать в таблицу 1.
Таблица 1 – Результаты измерений и вычислений
№ |
|
|
Измерено |
|
|
|
Вычислено |
|
||||||
Uг , |
I г , |
U ф , |
Iф , |
Pф , |
ns , |
P2 , |
P1 , |
, |
cos , |
n , |
M , |
|
||
опыта |
s |
|||||||||||||
В |
А |
В |
А |
Вт |
об/мин |
Вт |
Вт |
% |
о.е. |
об/мин |
Н·м |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
52
2.2. Скоростная характеристика – это зависимость s f P2 .
При холостом ходе, когда P2 0, ротор вращается с частотой близкой к частоте магнитного поля n1 . По мере увеличения нагрузки частота враще-
ния |
ротора уменьшается, а скольжение |
s |
увеличивается. Зависимость |
||
n |
f P2 |
представляет собой |
линию |
с |
небольшим наклоном, т.к. |
s% |
1 |
6 % . |
|
|
|
Частота вращения ротора n2 |
определяется стробоскопическим мето- |
||||
дом. Для этого на вал ротора помещается диск с нанесёнными на него секторами, число которых равно числу полюсов двигателя. Если освещать диск вращающегося ротора газоразрядной лампой, то создаётся эффект вращения секторов на диске в обратную сторону. Вращение столь медлен-
ное, что их частоту можно подсчитать визуально: ns n1 n2 , зная n1 |
и ns , |
|
определяют n2 n1 ns . |
|
|
Скольжение определяется соотношением s |
ns n1 . |
|
2.3. Механическая характеристика показывает зависимость M f P2 |
, где |
|
M – полезный момент на валу двигателя; P2 |
– полезная мощность на валу |
|
двигателя.
Вращающий момент на валу асинхронного двигателя M 9,55P2 / n2 . Так как с увеличением P2 скорость вращения ротора уменьшается не-
значительно, то зависимость M  f P2 будет почти линейной с некоторой
f P2 будет почти линейной с некоторой
вогнутостью.
2.4. По результатам опытов и расчётов построить рабочие характеристики двигателя n , S , cos , M , I , P1 , f P2 в одной системе координат и
механическую характеристику M  f P2 – в другой. 2.5. Сформулировать выводы по работе.
f P2 – в другой. 2.5. Сформулировать выводы по работе.
3. Контрольные вопросы
3.1.Объясните принцип действия трёхфазного асинхронного двигателя. Какие законы лежат в основе работы?
3.2.Какие виды асинхронных двигателей существуют?
3.3.Как влияет изменение питающего напряжения на вращающий момент асинхронного двигателя?
3.4.Перечислите способы регулирования частоты вращения асинхронных двигателей.
3.5.Что такое номинальное и критическое скольжение?
3.6.Назовите способы пуска асинхронных двигателей?
53
|
|
Лабораторная работа № 13 |
|
|||
ИССЛЕДОВАНИЕ ПОЛУПРОВОДНИКОВОГО ДИОДА |
||||||
Цель работы: Исследование напряжения и тока диода при прямом и об- |
||||||
|
ратном смещении р-n перехода, построение и исследование |
|||||
|
вольтамперной характеристики (ВАХ) полупроводникового |
|||||
|
диода и определение по ней основных параметров диода. |
|||||
1. Схема опыта |
|
|
|
|
||
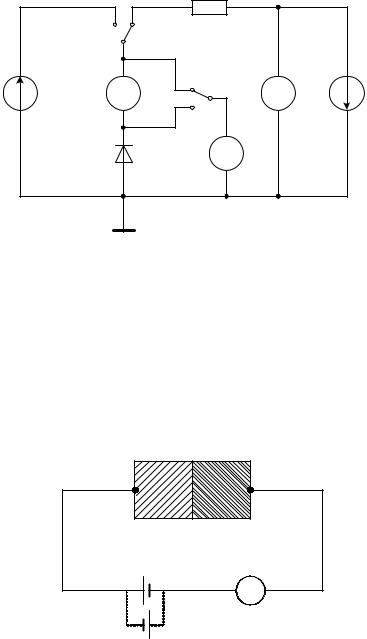
Схема для исследования представлена на рисунке 1. |
|
|||||
|
|
|
R1 |
|
|
|
|
|
S1 |
10 кОм |
|
|
|
|
|
|
|
|
||
|
- |
|
S2 |
+ |
Еобр |
|
Епр |
5 B |
A1 |
V2 |
|||
|
||||||
|
100 B |
|||||
|
+ |
|
|
- |
||
|
|
VD |
V1 |
|
|
|
Рисунок 1 – Электрическая схема измерения вольтамперной характеристики |
||||||
|
|
полупроводникового диода |
|
|||
Основные понятия о полупроводниковом диоде и его характеристиках
Полупроводниковый диод представляет собой двухэлектродный прибор на основе электронно-дырочного перехода в кристалле полупроводника (рисунок 2) и предназначен для преобразования переменного тока в пульсирующий ток одной полярности.
|
|
n |
p |
|
котод |
|
|
анод |
|
+ |
|
Обратное |
|
|
- |
смещение |
A |
||
|
||||
|
|
|
||
- |
|
Прямое |
|
|
|
смещение |
|
||
|
+ |
|
Рисунок 2 – Схема включения р-n перехода в электрическую цепь
54
Если к диоду приложить напряжение в прямом направлении, когда положительный полюс источника энергии соединён с р-областью (анодом), а отрицательный – с n-областью (катодом), то потенциальный барьер p-n- перехода понижается и через диод протекает большой прямой ток даже при невысоком приложенном напряжении. При смене полярности приложенного к диоду напряжения потенциальный барьер повышается и через диод протекает очень малый ток неосновных носителей заряда (обратный ток) даже при высоких значениях обратного напряжения.
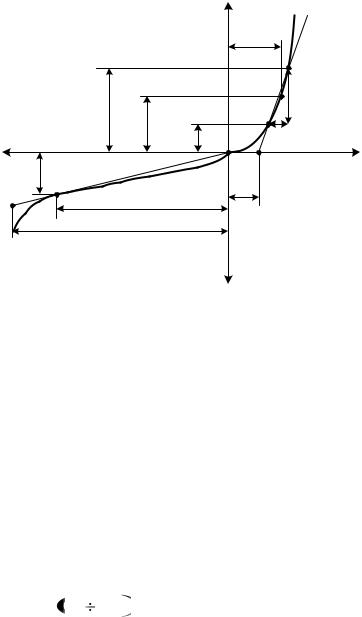
Вольтамперная характеристика (ВАХ) диода вследствие этого является резко несимметричной, и её типичный вид представлен на рисунке 3.
|
|
|
Iпр , А |
|
N |
|
|
|
|
|
|
Uпр |
|
|
|
|
|
|
L |
|
|
|
|
|
|
Iпр |
|
|
|
|
|
|
K |
|
Uобр , В |
1,5Iпр |
Iпр |
0,5Iпр |
|
Uпр |
Uпр , мВ |
|
|
|
О |
М |
||
Iобр |
|
|
|
|
||
P |
|
|
|
|
|
|
|
Uобр |
|
|
|
||
Q |
|
Uпорог. |
|
|||
Uпробоя |
|
|
||||
|
|
|
||||
|
|
|
|
|
||
V |
|
|
|
|
|
|
|
|
|
|
Iобр , мкА |
|
|
Рисунок 3 – Вольтамперная характеристика диода |
|
|||||
При анализе электрических цепей, содержащих диоды, нелинейные ВАХ последних во многих случаях заменяют отрезками прямых, т.е. проводят кусочно-линейную аппроксимацию ВАХ. На рисунке 3 прямая ветвь ВАХ диода аппроксимирована отрезками ОМ и MN. Отрезок MN проходит через точки K и L ВАХ, которые определяются по значению максимального прямого тока диода Iпр . Отрезок ОМ соответствует пороговому напря-
жению диода U порог. .
Обратная ветвь ВАХ диода заменяется отрезками прямых линий OQ и QV . Отрезок OQ выходит из начала координат и проходит через точку P ,
положение которой на ВАХ диода определяется наибольшим обратным напряжением Uобр  0,6 0,8 Uпробоя, где Uпробоя – напряжение пробоя диода. Отрезок QV параллелен оси тока и смещён относительно её на величину напряжения пробоя.
0,6 0,8 Uпробоя, где Uпробоя – напряжение пробоя диода. Отрезок QV параллелен оси тока и смещён относительно её на величину напряжения пробоя.
55

Дифференциальное прямое сопротивление rпр и дифференциальное обратное сопротивление rобр диода определяется углами наклона отрезков
MN и OQ к оси токов |
на рисунке |
3 и |
могут быть вычислены по |
|||
выражениям |
|
|
|
|
|
|
r |
|
Uпр |
, |
r |
Uобр |
. |
|
|
|
||||
пр |
|
Iпр |
|
обр |
Iобр |
|
|
|
|
|
|
||
2. Задание
2.1. Для снятия ВАХ диода необходимо собрать схему, представленную на рисунке 1.
На этой схеме источник напряжения Eпр позволяет регулировать пря-
мое напряжение диода VD от 0 до 5 В с шагом 0,05 В. Источник напряжения Eобр позволяет регулировать обратное напряжение диода VD от 0 до
100 В с шагом 1 В.
Вольтметр V1 измеряет напряжение на диоде, а амперметр А1 показывает ток диода. Вольтметр V2 является вспомогательным.
Переключатели S1 и S2 переключаются одновременно. Переключатель S1 в левом положении подключает к диоду источник прямого напряжения,
а в правом положении подключает к диоду источник обратного напряжения. Переключатель S2 подключает вольтметр V1 непосредственно к дио-
ду при измерении малых прямых напряжений для исключения погрешности за счёт падения напряжения на амперметре А1. При измерении малых обратных токов диода этот переключатель подключает амперметр А1 непосредственно к диоду для исключения погрешности за счёт утечки тока через вольтметр. Резистор R1 в схеме предназначен для ограничения об-
ратного тока диода при высоких обратных напряжениях.
2.2. Измерить напряжения и токи диода для прямой ветви его ВАХ. Для этого перевести переключатель S1 в левое по схеме положение. Регулируя
прямое напряжение, записать показания приборов таблицу 1.
Таблица 1 – Прямая ветвь ВАХ полупроводникового диода
Uпр , В |
0 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
Iпр , А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.3. Измерить напряжения и токи диода для обратной ветви его ВАХ. Для этого перевести переключатель S1 в правое по схеме положение. Регули-
руя обратное напряжение, записать показания приборов таблицу 2.
56
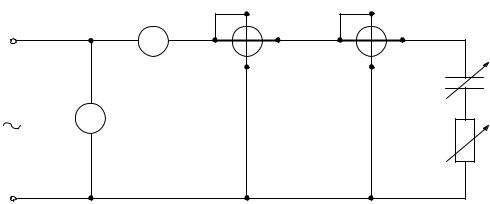
Таблица 2 – Обратная ветвь ВАХ полупроводникового диода
Uобр, В |
0 |
|
|
|
|
|
|
|
Uпробоя |
Iобр , А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Всего провести 8–10 измерений, ограничившись напряжением, близким к напряжению пробоя диода Uпробоя. Режим пробоя проявляется значительным увеличением обратного тока через диод при увеличении приложенного к нему обратного напряжения.
2.4. Построить ВАХ диода по результатам эксперимента, определить по ней основные параметры диода. На этом же графике выполнить кусочнолинейную аппроксимацию ВАХ.
2.5. Сформулировать выводы по работе.
3. Контрольные вопросы
3.1.Как образуется р-n переход и какое его основное свойство?
3.2.Как устроен диод?
3.3.Какова схема включения диода в электрическую цепь?
3.4.Каков принцип работы полупроводникового диода?
3.5.Что обозначает каждый из параметров диода в этой работе?
Лабораторная работа № 14
ОПРЕДЕЛЕНИЕ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
Цель работы: Определение погрешностей электроизмерительных приборов.
1. Схема опыта
Электрическая цепь для измерения параметров электрической цепи представлена на рисунке 1.
|
* |
|
W |
A |
* |
|
V
*
*
XC
R
Рисунок 1 – Электрическая цепь для измерения параметров электрической цепи
57
Основные расчётные выражения для определения погрешностей электроизмерительных приборов
Погрешность измерений – это отклонение результата измерений от истинного значения измеряемой величины. Различают абсолютную, относительную и приведённую погрешности измерения.
Абсолютная погрешность  равна разности между результатом измерения Aиз и истинным значением измеряемой величины А :
равна разности между результатом измерения Aиз и истинным значением измеряемой величины А :
Аиз А .
Относительная погрешность  представляет собой отношение абсолютной погрешности измерения к истинному значению измеряемой величины, выраженное в процентах:
представляет собой отношение абсолютной погрешности измерения к истинному значению измеряемой величины, выраженное в процентах:
А |
100% |
Аиз |
А |
100% . |
А |
А |
|
Приведённая погрешность – это отношение абсолютной погрешности к нормирующему значению прибора, выраженное в процентах:
100% ,
Анорм
где Анорм – максимальное значение шкалы прибора, т. е. нормирующее
значение прибора.
Согласно ГОСТ 8.401-80 средствам измерений присваивают определённые классы точности. Классы точности выражаются одним числом из
ряда 1, 1,5, 2, 2,5, 4, 5, 6 10n , где n 1, 0, -1, -2 и т.д.
Классом точности средства измерения называется обобщённая его характеристика, определяемая пределами допускаемых основной погрешности и погрешностей, названных изменением значений влияющих величин.
Большинству аналоговых электроизмерительных приборов присваивается класс точности, определяемый основной, наибольшей, допустимой приведённой погрешностью
доп Амакс 100% , норм
где макс – предел допустимой максимальной абсолютной погрешности измерения.
58
У приборов, класс точности которых выражается одним числом, основная приведённая погрешность прибора в рабочем диапазоне рабочей шкалы, выраженная в процентах, не должна превышать значения, соответствующего класса точности.
2. Задание
2.1. Собрать электрическую схему, представленную на рисунке 1. Снять показания приборов при двух значениях нагрузки, указанных преподавателем.
2.2. По результатам измерений вычислить относительную погрешность , приняв абсолютную погрешность максимальной макс .
2.3. Результаты измерений и вычислений занести в таблицу 1.
Таблица 1 – Результаты измерений и вычислений
Наименование |
Класс |
Предел |
Показание |
макс , |
, |
прибора |
точности |
измерения |
прибора, |
А, В, Вт, - |
% |
|
прибора, |
прибора, |
А, В, Вт, - |
|
|
|
% |
А, В, Вт, - |
|
|
|
Амперметр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вольтметр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ваттметр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фазометр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.4. Сделать выводы по работе.
3. Контрольные вопросы
3.1.Какие виды погрешностей измерения Вы знаете:
–по способу числового выражения?
–в зависимости от источника возникновения?
–по закономерности появления?
3.2.Как устанавливаются классы точностей для различных типов средств измерений?
3.3.Определить класс точности миллиамперметра с пределом измерения 0,5 мА для измерения тока 0,1 … 0,5 мА так, чтобы относительная погрешность измерения тока не превышала 1 %?
59

ЗАКЛЮЧЕНИЕ
В настоящем пособии представлены только 14 лабораторных работ, которые охватили основные темы из теории линейных электрических цепей постоянного однофазного и трёхфазного переменного тока, магнитных цепей (10 работ) и некоторые темы из области электрических машин и электронной техники (4 работ). По всем этим темам даны краткие теоретические сведения.
Упрощённый и достаточно подробный подход к порядку выполнения лабораторных работ и необходимые теоретические сведения, которые сопровождают каждую работу, позволят, на взгляд авторов, быстрее и лучше усвоить теоретический материал по дисциплине «Электротехника и электроника».
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Власьевский, С. В. Электротехника и электроника : учеб. пособие / С. В. Власьевский. – Хабаровск : РИЦ ХГАЭП, 2007. – 116 с.
2. Данилов, И. А. Общая электротехника с основами электроники / И. А. Данилов, П. М. Иванов. – М. : Высшая школа, 2000. – 752 с.
3. Берёзкина, Т. Ф. Задачник по общей электротехнике с основами электроники / Т. Ф. Берёзкина, Н. Г. Гусев, В. В. Масленников.– М. : Высшая школа, 2001. – 380 с.
Учебное издание
Станислав Васильевич Власьевский
Ольга Александровна Клинкова
ЭЛЕКТРОТЕХНИКА И ЭЛЕКТРОНИКА
Учебное пособие
Редактор Г.С. Одинцова
______________________________________________________________________________
Подписано в печать |
Формат 60 |
84/16 |
|
Бумага писчая. Печать офсетная |
|
||
Усл. п.л. |
Уч-изд. |
Тираж |
экз. |
Заказ
______________________________________________________________________________
680042, г. Хабаровск, ул. Тихоокеанская, 134, ХГАЭП, РИЦ
60