

РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ И ИЗМЕНЕНИЕНАПРАВЛЕНИЯ ВРАЩЕНИЯ
Посколькучастота вращениямагнитногополя АД
определяетсявыражением
используют три метода регулирования частоты вращенияасинхронныхдвигателей:
1.Изменение частоты f питающего напряжения (частотное регулирование);
2.Изменениечисла полюсов 2р обмоткистатора;
3. Изменение скольжения s. Данный метод основан на свойствах механической характеристики и реализуетсяпо двум способам:
3.1. В АД с фазным ротором скольжение s обычно изменяют путем изменения величины сопротивления добавочного реостата, включенного
вцепь ротора.
3.2.В двигателях с К.З. ротором изменяют
величинупитающего напряжения.
Частотноерегулирование.
Способ позволяет применять двигатели с короткозамкнутым ротором. Требуется наличие преобразователя частоты - источника электрического тока переменной частоты. Преобразователи частоты обычно выполняются на управляемых полупроводниковых транзисторах или тиристорах. Для получения требуемой характеристики двигателя следует изменять не только f1, но и U1.
Основнойзакон частотногорегулирования:
Закон Костенко — характеристики АД при частотах питающего напряжения, отличных от номинальной, зависят от соотношения между напряжениемсети U1 и частотой f1.
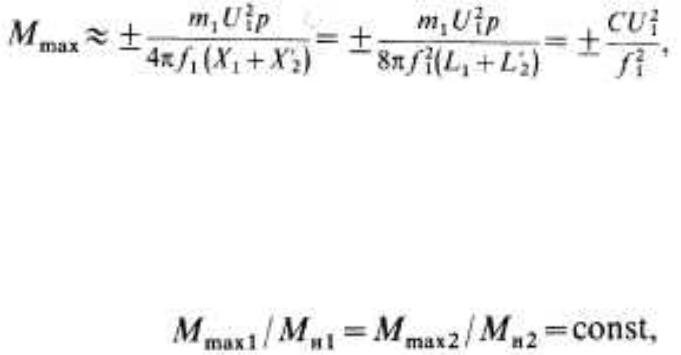
Для максимального момента АД имеем
При изменении частоты меняется Mmax.
Для устойчивости работы двигателя необходимо выполнить соотношение Mmax/Mном≥1,7...2. Поэтому при частотном регулировании должно быть обеспечено условие
индексы «1» и «2» относятся к различным частотам U1, т. е. к различным частотам вращения.
Соотношение максимальных моментов при частотном регулировании 
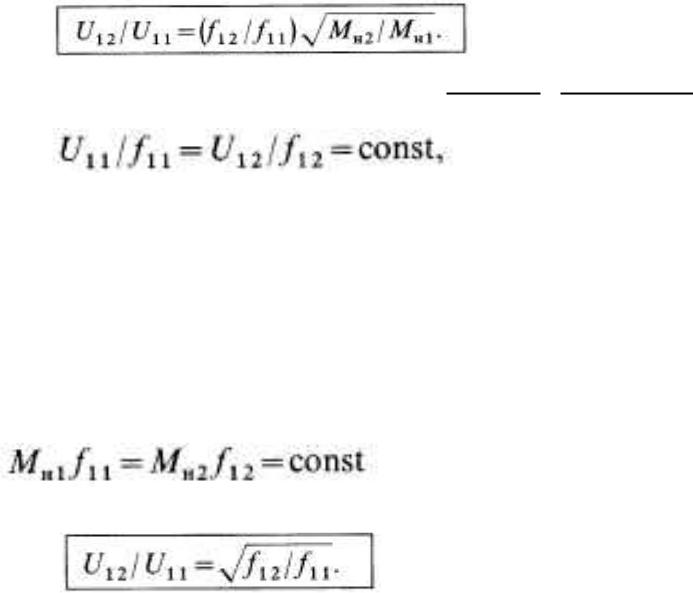
Основной закон частотного регулирования :
При постоянном моменте нагрузки Мн1 = Мн2 = const уравнение принимает вид
Питающее напряжение следует изменять прямо пропорциональноего частоте.
При этом мощность двигателя увеличивается прямо пропорциональновозрастанию частоты вращения.
При постоянной мощности нагрузки требуется поддерживать режим Ρ2 = Μ2Ω2 = const. Отсюда получим условие
или подставив его в (4) получим
Регулирование путем изменения числа полюсов.
Позволяет получить ступенчатое изменение частоты вращения. Показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в 2 раза. Для этого каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. При включении катушек 1—2 и 3—4 в две параллельные ветви число полюсов уменьшается в 2 раза, а следовательно, частота вращения магнитного поля увеличивается в 2 раза.
Асинхронные двигатели с переключением числа полюсов называют многоскоростными. Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями
3000:1500:1000:750
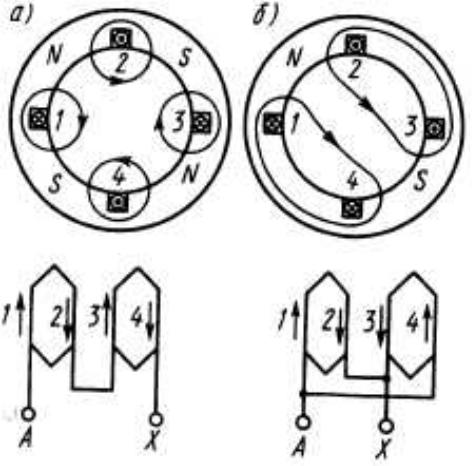
Схема переключения одной фазы обмотки статора для
изменения числа полюсов при 2p=4 (а) и 2p = 2(б)
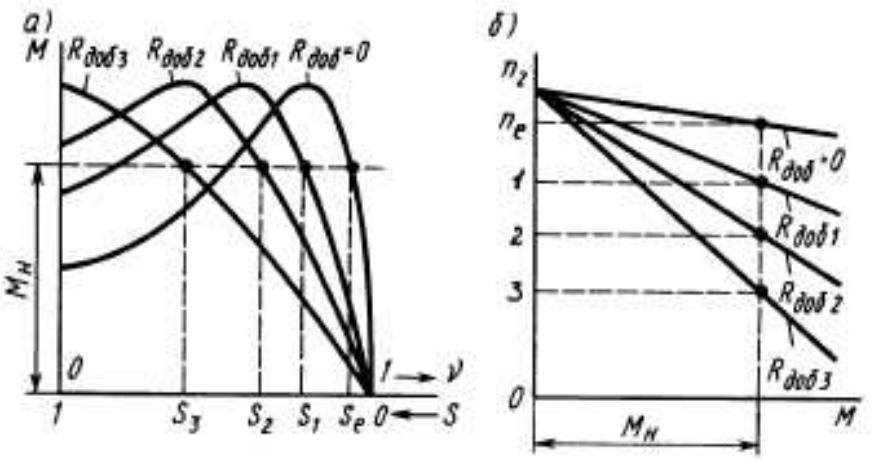
Регулирование путем включения реостата в цепь ротора.
Этот метод регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются: а) большие потери энергии в регулировочном реостате; б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлениив цепи ротора.
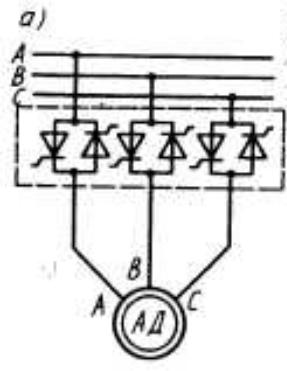
Регулирование путем изменения питающего напряжения.
Этот способ можно осуществить посредством тиристорного регулятора напряжения РН в каждой фазе которого включено по два встречно-параллельно включенных тиристора. При изменении угла регулирования тиристоров изменяется действующее значение напряжения, подаваемого на асинхронныйдвигатель АД.