

СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОЙ МАШИНЫ
Схема замещения позволяет определить токи, потери мощности и падения напряжения в асинхронноймашине.
Схема замещения ротора.
В обмотке вращающегося ротора проходит ток, действующее значение и частота которого зависят от частоты вращения. 
индуктивное сопротивление обмотки ротора зависит от скольжения
где Х2—индуктивное сопротивление обмотки заторможенногоротора. Получим:
Этому выражению соответствует схема замещения (а). Поделив, числитель и знаменатель выражения на скольжение,(S) получим
Этому уравнению соответствует электрическая схема замещения (б). Здесь ЭДС Е2 и индуктивное сопротивление Х2 неизменны, а активное сопротивление R2/s изменяется в зависимости от скольжения. Схемы, представленные на рис а и б, с энергетической точкизренияне эквивалентны.
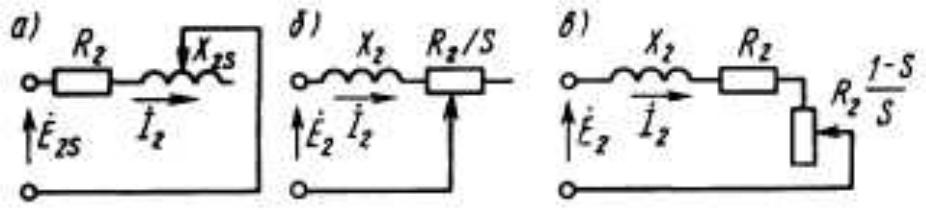

В схеме а электрическая мощность ротора Рр равна электрическим потерям
Мощность в схеме рис. б равна всей электромагнитной мощности, подводимой от статора к ротору Рэм 
По известным значениям Рэл2 и Рэм можно определитьмеханическую мощностьротора:
Этому соответствует схема (в) в которой активное сопротивление обмотки ротора состоит из двух частей: R2 и R2(1—s)/s.
Первое сопротивление не зависит от режима работы, и потери в нем равны электрическим потерям реального ротора. Второе сопротивление зависит от скольжения, и мощность, выделяющаяся в нем, численно равна механической мощности двигателя, т.е. мощности нагрузки. Схема замещения (в) позволяет заменить реальный вращающийся ротор неподвижным, в цепь обмотки которого включено активное сопротивление, зависящееот частоты вращенияротора.
Т-образная схема замещениявращающегосяАД.
Схема замещения АД при вращающемся роторе отличается от схемы замещения АД с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (от скольжения). Эту схему замещения называютТ-образной.
Сопротивления Rm и Хт намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток хх АД гораздо больше, чем у трансформатора. При рассмотрении работы АД пренебречь намагничивающим контуром нельзя, так как ошибкаможет получиться значительной.
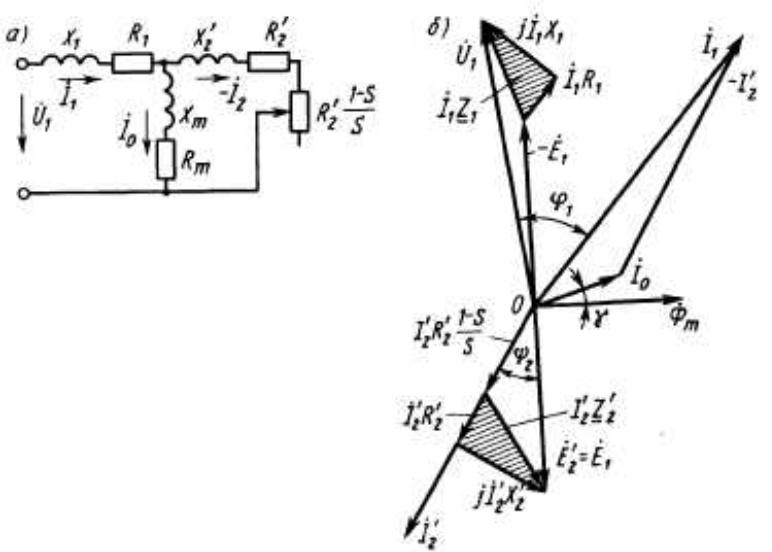
Т-образнаясхема замещения (а) асинхронной машиныи ее векторнаядиаграмма (б)
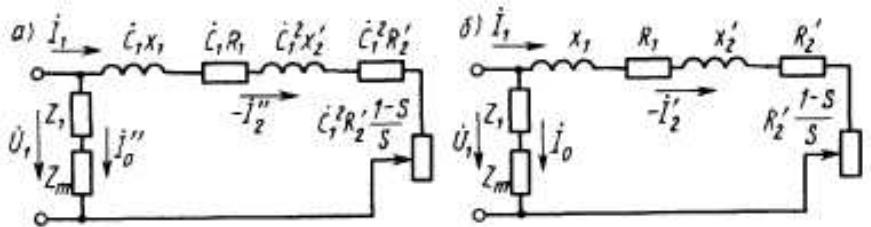
Г-образная схема замещения. Можно упростить Т-
образную схему замещения в Г-образную. Для Г-образной схемы замещения ( а) имеем
I1 I0 ( I2);I2 I2 /C1,
где I и I2 — токи рабочих контуров для Т- и Г-образной схем2замещения. Комплекс
C1 1 (R1 jX1)/(Rm jXm)
можно заменить модулем С1 который для АД мощностью 10 кВт и выше равен 1,02...1,05. При анализе часто полагают С1≈1, что мало влияет на точность полученных результатов. Г-образную схему замещения при С1 = 1 называют упрощенной схемой замещения с вынесенным намагничивающим контуром
(б). В этой схеме намагничивающий ток без большой погрешности можно приравнять току I0
Связь между скольжением и коэффициентом полезного действия
КПД АД Где
Если в данном выражении пренебречь потерями на трение (∆Рт) и добавочными потерями (∆Рдоб) возрастает числитель и можно записать неравенство
Следовательно, η<η2<(1—s).Таким образом, для работы асинхронного двигателя в номинальном режиме с высоким КПД необходимо, чтобы в этом режиме он имел небольшое скольжение (sном= 0,01...0,06). Для этого обмотку ротора выполняют с небольшимактивным сопротивлением.