

10. Что такое OpenCv
OpenCV (Open Source Computer Vision Library) — библиотека алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения с открытым кодом.
Основные объекты:
1. Mat — двумерная матрица для хранения фото. Каждый элемент представляет собой один пиксель. Для изображениях в градациях серого элемент представлен 8-битным числом без знака (от 0 до 255). Для цветного изображения в формате RGB таких чисел 3, по одному на каждую компоненту цвета. CVMat
2. Point — точка (структура из двух переменных (x, y)). CVPoint
3. Size — размер (структура из двух переменных (width, height)). CVSize
4. Rect — прямоугольник (структура из четырех переменных (x, y, width, height)). CVRect
5. Scalar — скаляр (4 числа типа double). CVScalar
6. Цветовое пространство hsv
HSV (англ. Hue, Saturation, Value — тон, насыщенность, значение) или HSB (англ. Hue, Saturation, Brightness — оттенок, насыщенность, яркость) — цветовая модель, в которой координатами цвета являются:
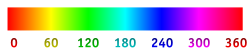
Шкала оттенков — Hue
Hue — цветовой тон, (например, красный, зелёный или сине-голубой). Варьируется в пределах 0—360°, однако иногда приводится к диапазону 0—100 или 0—1.
Saturation — насыщенность. Варьируется в пределах 0—100 или 0—1. Чем больше этот параметр, тем «чище» цвет, поэтому этот параметр иногда называют чистотой цвета. А чем ближе этот параметр к нулю, тем ближе цвет к нейтральному серому.
Value (значение цвета) или Brightness — яркость. Также задаётся в пределах 0—100 и 0—1.
7. Цветовое пространство yuv
YUV широко используется в семействе кодеков MPEG.
Составляющие пространства:
Y - яркостная компонента, если оставить только её получим изображение в оттенках серого, компонента получается из исходного RGB сигнала, каждая составляющая множится на свой вес (сумма весов - 1)
U - разностная компонента для голубого цвета (B' - Y')
V - разностная компонента для красного цвета (R' - Y')
Основная прелесть этого пространства в том, что для телевизионщиков можно использовать ЧБ инфраструктуру, а кроме того, для хранения информации о цвете для одного пикселя требуется меньший объем памяти (при различных организациях хранения, коих множество).
Лекция 3. Основные операции с изображениями
1. Какие типы операций с изображениями бывают?
— Поточечные (локальные) — работающие с местоположением одной ячейки.
— Фокальные (локальные с окрестностью) — работающие с местоположением ячейки и соседних с ней ячеек.
— Глобальные — работающие со всеми ячейками растра.
2. Что такое поточечные операции? Приведите примеры
Это побитовые операции изображения (Прямые операции с нужными пикселями изображения). Например, увеличение интенсивности изображения (умножение каждого пикселя картинки на какое-то число)
3. Что такое автоматическая коррекция изображения?
Линейная (или автоматическая) коррекция — компенсация узкого диапазона яркостей y = a ·
x + b, где a — контрастность, b — яркость, определяют желаемые показатели ymin и ymax выходной яркости.
4. Что такое выравнивание гистограммы и как оно работает?
Гистограмма — это график распределения яркостей на изображении. На горизонтальной оси шкала яркостей тонов от белого до черного, на вертикальной оси — число пикселей данной яркости.
Выравнивание (или эквализация) гистограммы – процедура коррекции яркости пикселей, которая делает гистограмму яркости пикселей более равномерной, без больших пиков и пропусков.
5. Что такое локальное выравнивание гистограммы и как оно работает?
Локальное выравнивание гистограммы – изображение делится на части и происходит выравнивание гист в каждой отдельной части. Нужно, когда изображение неравномерное – во избежание пересветов/недосветов
При локальных операциях используют только соседние точки.
6. Что такое проблема границы и как ее решают?
При локальной обработке возникает проблема обработки краев изображения. Решение этой проблемы заключается в дополнении краев определенным цветом, заворачивании изображения, считая его структурой шара, размножении края и отражении от границ.
7. Что такое линейный фильтр, как он работает и зачем нужен
Линейная фильтрация (операция свертки) – операция усреднения цвета пикселя по его окрестности, каждый пиксель заменяется взвешенным средним по окрестности. Задается квадратной матрицей h размером k.
При линейной фильтрации выходное значение пикселя зависит от взвешенной суммы входных пикселей. (Средний фильтре, Гаусс фильтре и тд)
Фильтрация выполняется для каждого пикселя в матрице пикселей исходного изображения, вычисляется произведение окружающих пикселей и соответствующего элемента положения матрицы фильтра, а затем складываются результаты для получения окончательного значения.
С их помощью решаются задачи поиска границ, уголков, удаления шумов