

Задание 3
1. Текст задания
Для системы автоматического регулирования, структурная схема которой приведена на рис. 3.1, принять:
 .
.
Выбор
постоянной времени
 производится в соответствии с вариантом
задания.
производится в соответствии с вариантом
задания.
Рис 28.
Определить аналитическую зависимость ИКО
 от коэффициента передачи
.
Вычисления производятся в соответствии
с формулами (1.4) - (1.6).
от коэффициента передачи
.
Вычисления производятся в соответствии
с формулами (1.4) - (1.6).
Построить
график зависимости ИКО
от коэффициента передачи
 .
.
Получить семейство зависимостей улучшенной ИКО
 от коэффициента
при нескольких значениях весового
коэффициента
от коэффициента
при нескольких значениях весового
коэффициента
 .
Полученные результаты представить в
соответствующих строках табл. 1.
Вычисления производятся в соответствии
с формулами, приведенными в основных
сведениях из теории настоящих указаний.
.
Полученные результаты представить в
соответствующих строках табл. 1.
Вычисления производятся в соответствии
с формулами, приведенными в основных
сведениях из теории настоящих указаний.
2. Вариант.
Вариант №4:

Согласно заданному варианту ПФ будут описаны следующими уравнениями:
3. Выполнение задания.
1) Определение аналитической зависимости ико от коэффициента передачи :
Исходя из полученной ПФ согласно варианту видно, что регулятор имеет только коэффициент усиления. Следовательно, имеем дело с П-регулятором.
Запишем ПФ разомкнутого контура:

Для определения аналитической зависимости ИКО для начала определим изображение ошибки:

Где
 ,
поскольку информация о возмущающем
воздействии отсутствует.
,
поскольку информация о возмущающем
воздействии отсутствует.
По условию:

Тогда ИКО (интегральная квадратичная оценка) переходного процесса можно вычислить по изображению ошибки:


 Следовательно
порядок ХП изображения ошибки
Следовательно
порядок ХП изображения ошибки
 ,
а сами параметры изображения ошибки
таковы:
,
а сами параметры изображения ошибки
таковы:

Так как , то зависимость ИКО определяется по следующей формуле:

Используя программные средства MATLAB/Simulink построим график зависимости ИКО от коэффициента (рис. 29).
Заметно, что при достаточно малых коэффициентах регулятора значение ИКО велико, а на достаточно больших коэффициентах ИКО стремится к нулю. Это обусловлено тем, что при высоких коэффициентах П-регулятора переходный процесс сначала колебательный с высокой амплитудой, затем резко затухает. Для оценки интегрального показателя качества при больших коэффициентах усиления П-регулятора следует применять улучшенную ИКО.
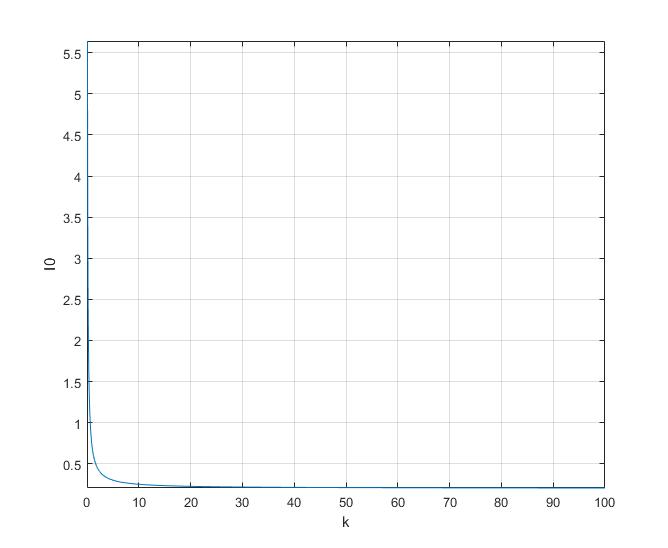
Рис. 29. Зависимость ИКО от коэффициента П-регулятора.
2) Определение семейства зависимостей улучшенной ико :
Для вычисления улучшенной ИКО выражение (1.2) записывается в виде:
 ,
где
,
где

Для
вычисления второго интеграла
 необходимо получить изображение
производной ошибки.
необходимо получить изображение
производной ошибки.

где
 определяется выражением
,
а начальное значение ошибки
определяется выражением
,
а начальное значение ошибки
 – по теореме о начальном значении
оригинала:
– по теореме о начальном значении
оригинала:
В таком случае имеем следующее:

Следовательно порядок ХП производной изображения ошибки , а сами параметры изображения ошибки таковы:

Так как
,
то зависимость
 определяется по следующей формуле:
определяется по следующей формуле:
Аналитическая зависимость улучшенной ИКО имеет вид:
 ,
где
,
где
 – весовой коэффициент.
– весовой коэффициент.
Весовой коэффициент подбирается таким образом, чтобы учесть производную ошибки. Рассчитаем ИКО и Улучшенную ИКО. (см табл. 1.)
Таблица 1. Значения ИКО и Улучшенной ИКО.
Значения |
Интегральные показатели качества |
||
|
|
|
|
0,01 |
50,2 |
0,01 |
50,2001 |
0,1 |
50,2005 |
||
1 |
50,2050 |
||
0,10 |
5,2 |
0,01 |
5,2005 |
0,1 |
5,2050 |
||
1 |
5,2500 |
||
1,00 |
0,7 |
0,01 |
0,7050 |
0,1 |
0,7500 |
||
1 |
1,2000 |
||
10,0 |
0,25 |
0,01 |
0,3000 |
0,1 |
0,7500 |
||
1 |
5,2500 |
||
100 |
0,205 |
0,01 |
0,7050 |
0,1 |
5,2050 |
||
1 |
50,2050 |
||
250 |
0,202
|
0,01 |
1,4520 |
0,1 |
12,7020 |
||
1 |
125,2020 |
||
1000 |
0,2005 |
0,01 |
5,2005 |
0,1 |
50,2005 |
||
1 |
500,2005 |
||
Отметим, что при
 улучшенная интегральная
квадратичная оценка
значительно отличается от обычной. На
малых
улучшенная интегральная
квадратичная оценка
значительно отличается от обычной. На
малых
 различия минимальны.
различия минимальны.
Исходя из информации можно сделать вывод, что в системе при переходный процесс либо монотонно-затухающий, либо плавно колебательно-затухающий, а при переходный процесс представляет собой резко колебательно-затухающий.