

1. Текст задания
Для объекта, который описывается следующей передаточной функцией:
 ,
,
где
 выбрать из варианта задания.
выбрать из варианта задания.
Вычислить операторным методом параметры регулятора, с учетом следующих требований к процессу:
1.1 Запас устойчивости
по фазе не менее
 ;
;
1.2 Перерегулирование в системе не более 10%;
1.3 .
2. Построить систему без регулятора и систему с регулятором в среде Matlab/SIMULINK. Для каждой системы получить переходные характеристики, частотные характеристики (ЛЧХ, АФХ).
2. Вариант.
Вариант №4:

Согласно заданному варианту ПФ будут описаны следующими уравнениями:
3. Выполнение задания.
Входные воздействия
определим как

Исследуемая схема изображена на рис. 18.
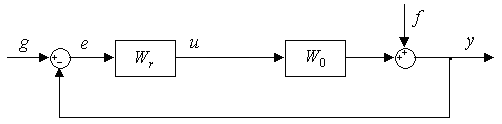
Рис.18. Исследуемая схема.
В качестве регулятора будем использовать ПИ-регулятор с неизвестными параметрами, которые будут определены в процессе исследования системы.
ПФ ПИ-регулятора:
Так как, по условию
необходимо установление статической
ошибки на значении
 то необходимо первоначально исследовать
то необходимо первоначально исследовать





Условие сохранения
 выполнены. Для исследования частотных
и временных характеристик необходимо
построить ПФ для цепи. Преобразуем
исходную схему к эквивалентным для 2
случаев: 1)
выполнены. Для исследования частотных
и временных характеристик необходимо
построить ПФ для цепи. Преобразуем
исходную схему к эквивалентным для 2
случаев: 1)
 ,
2); 2
,
2); 2
 .
.
В результате преобразования получим ПФ для обозначенных выше случаев:
Рассмотрим структурную схему с двумя источниками воздействий, тогда для нее можно применить метод наложения. ПФ схемы будет выражаться:

Оценим
устойчивость системы по критерию
Стодолы. Запишем ХП системы:

Коэффициенты
полинома не могут принимать значения
с одинаковыми знаками. Исключим
коэффициент
 добавлением
добавлением
 :
:

За
этот коэффициент отвечает коэффициент
при
 в числителе
в числителе
 :
:
В итоге имеем ПИД-регулятор:
ПФ разомкнутого контура принимает вид:



Условие нуля установившееся ошибки выполнено.
Определим устойчивость системы по критерию Гурвица для ПФ системы:

Запишем характеристический полином:




Решив
данные неравенства при T=1 получим, что
система является устойчивой при
 .
Подберем параметры таким образом, чтобы
запас устойчивости по фазе был больше
либо равен 60, а перерегулирование не
превышало 10%.
.
Подберем параметры таким образом, чтобы
запас устойчивости по фазе был больше
либо равен 60, а перерегулирование не
превышало 10%.
Используя
программные средства MATLAB/Simulink построим
график переходной характеристики (рис.
18), ЛАЧХ и ЛФЧХ(рис. 19) при
 .
.
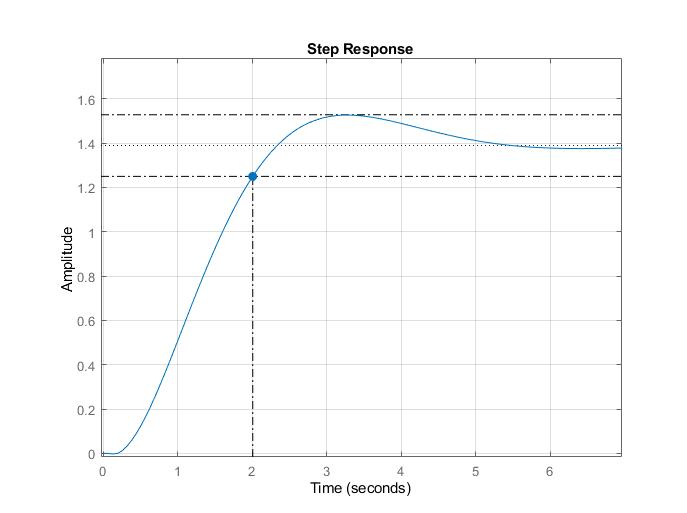
Рис. 18. Переходная характеристика при .
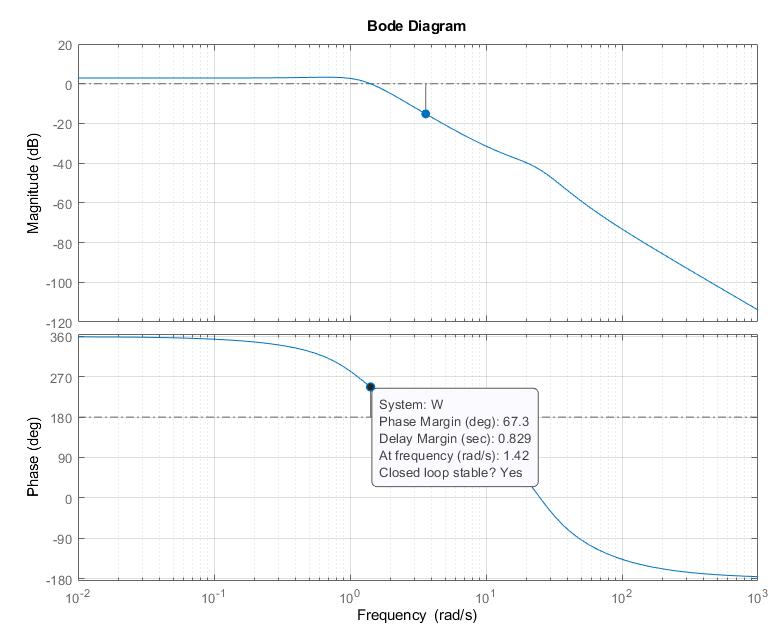
Рис.
19. ЛАЧХ и ЛФЧХ при
(запас
устойчивости по фазе -
 ).
).
Построим систему без регулятора и систему с регулятором в среде Matlab/SIMULINK.
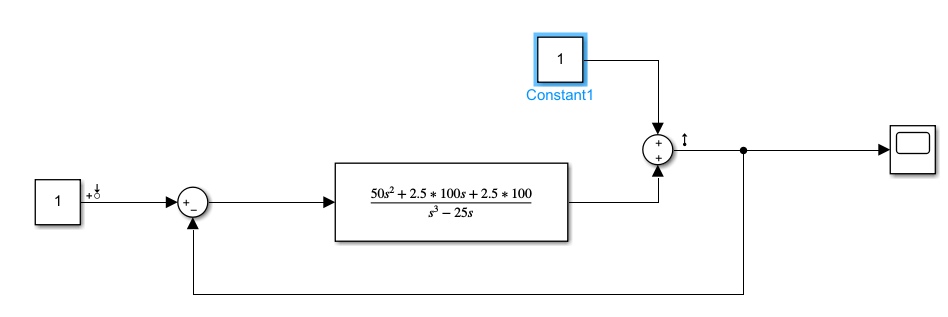 Рис.
20. Структурная схема с
ПИД-регулятором
в среде Matlab/SIMULINK.
Рис.
20. Структурная схема с
ПИД-регулятором
в среде Matlab/SIMULINK.
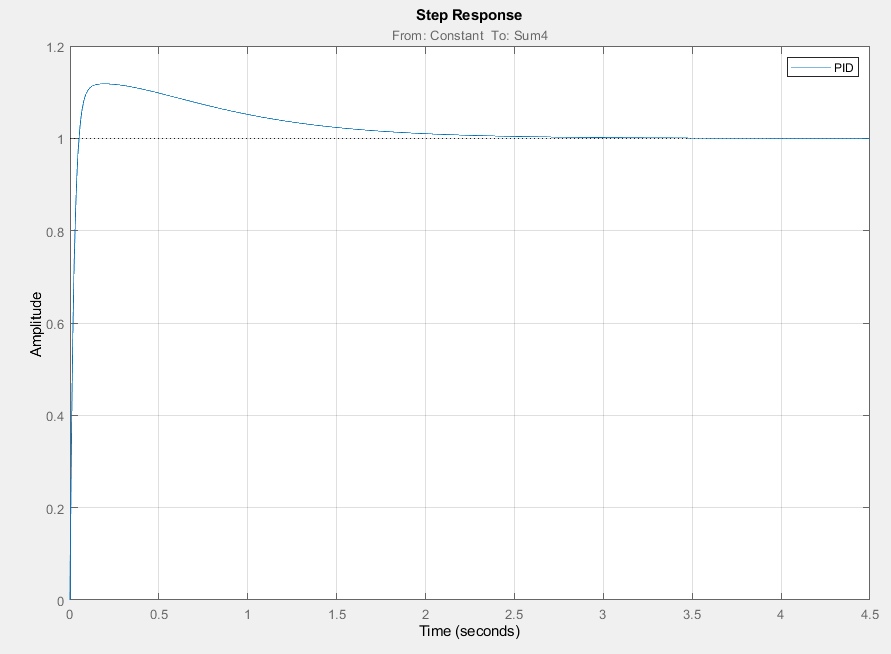
Рис. 21. ПХ с ПИД-регулятором (перерегулирование 10%).
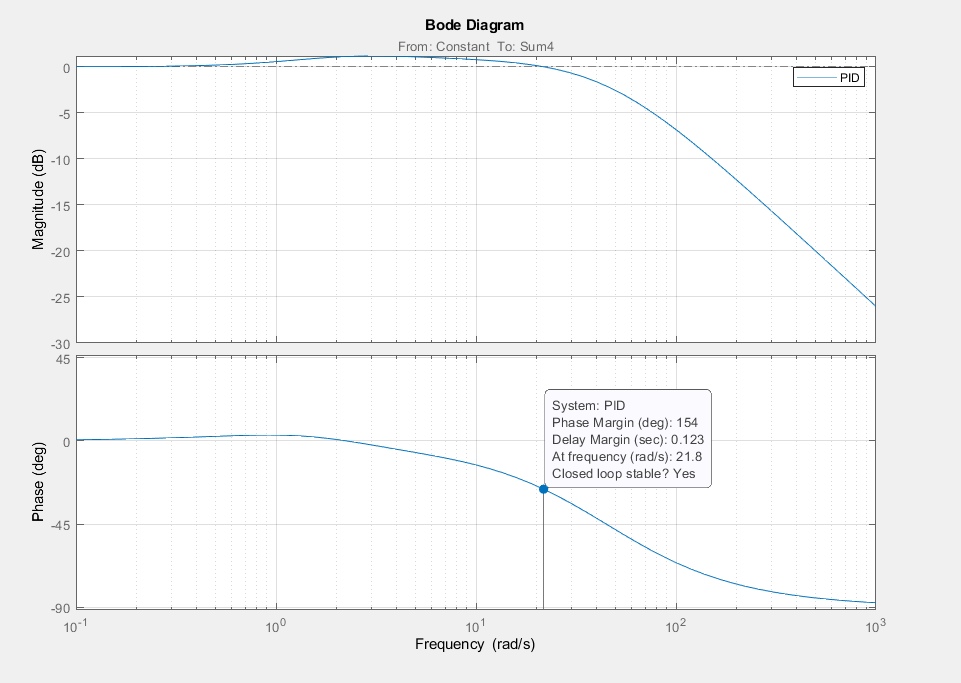 Рис.
22. ЛАЧХ и ЛФЧХ с
ПИД-регулятором
(запас
устойчивости по фазе -
Рис.
22. ЛАЧХ и ЛФЧХ с
ПИД-регулятором
(запас
устойчивости по фазе -
 ).
).
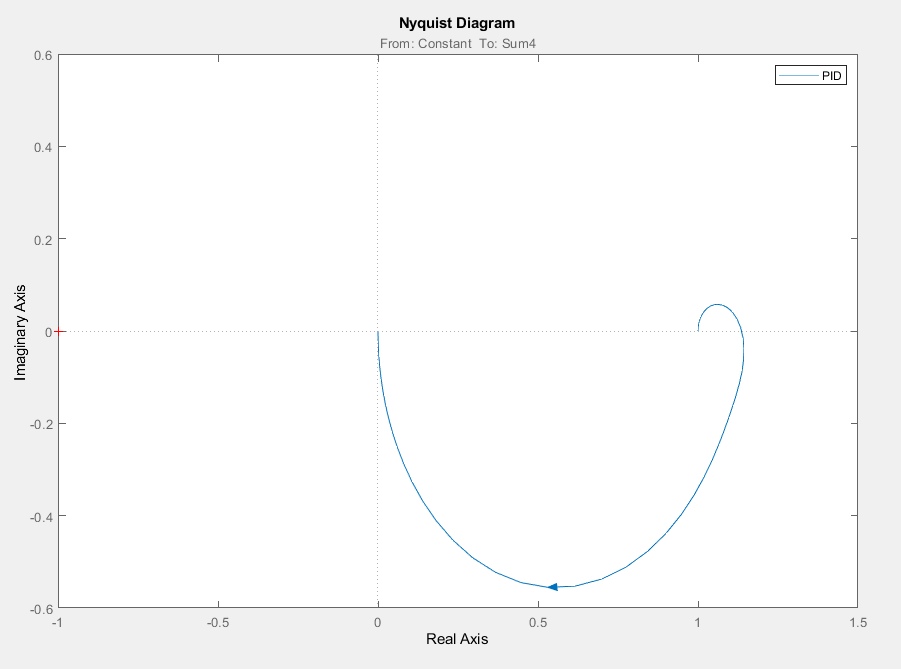 Рис.
23. АФХ с
ПИД-регулятором.
Рис.
23. АФХ с
ПИД-регулятором.
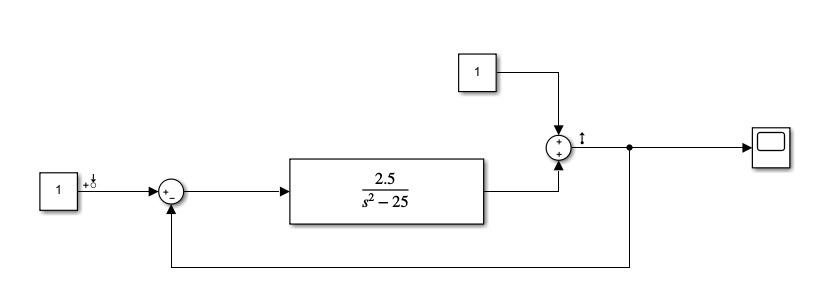 Рис.
24. Структурная схема без
регулятора в
среде Matlab/SIMULINK.
Рис.
24. Структурная схема без
регулятора в
среде Matlab/SIMULINK.
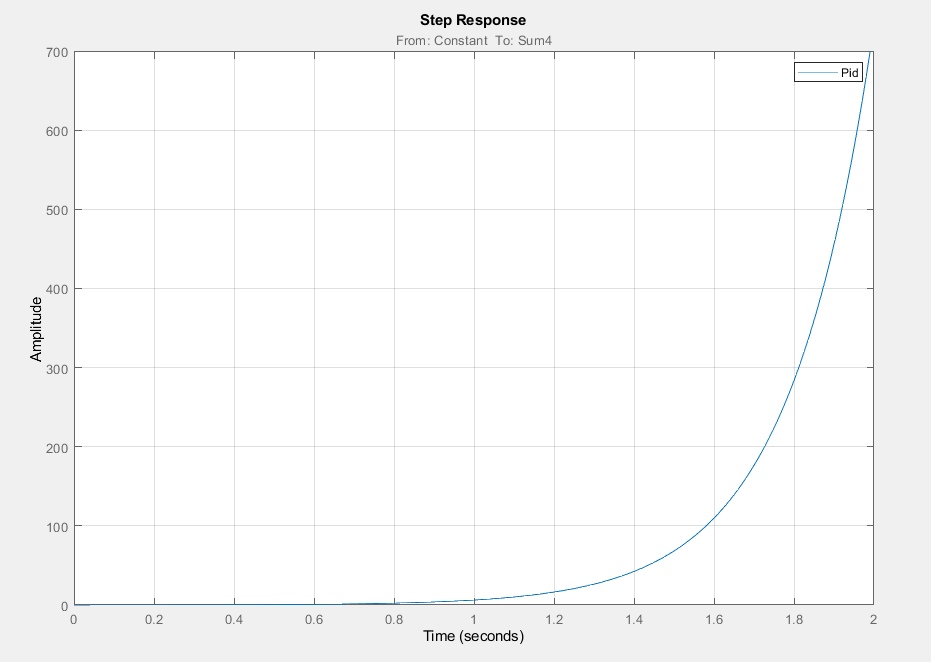
Рис. 25. Переходная характеристика.
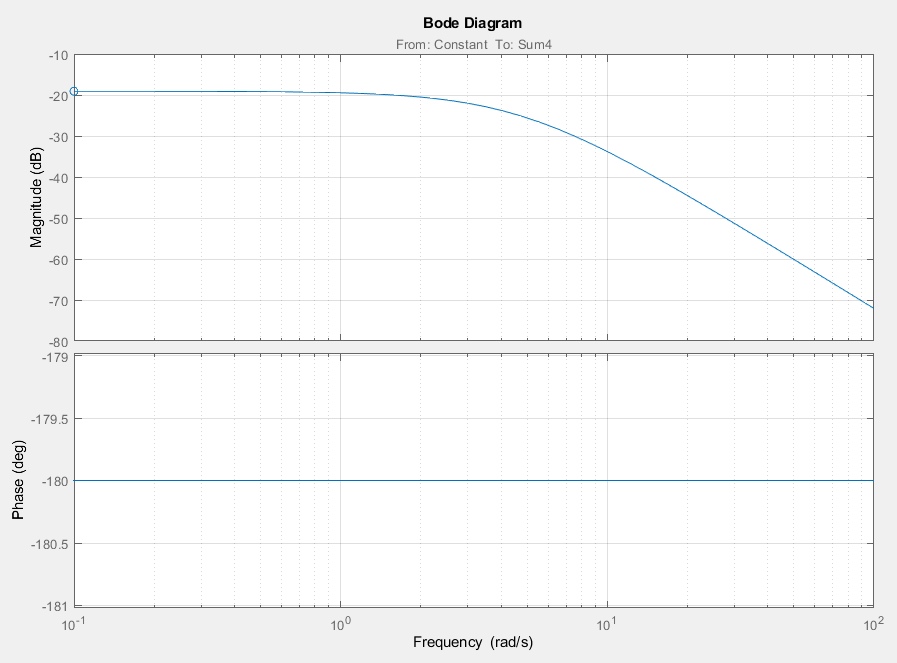
Рис. 26. ЛАЧХ и ЛФЧХ.
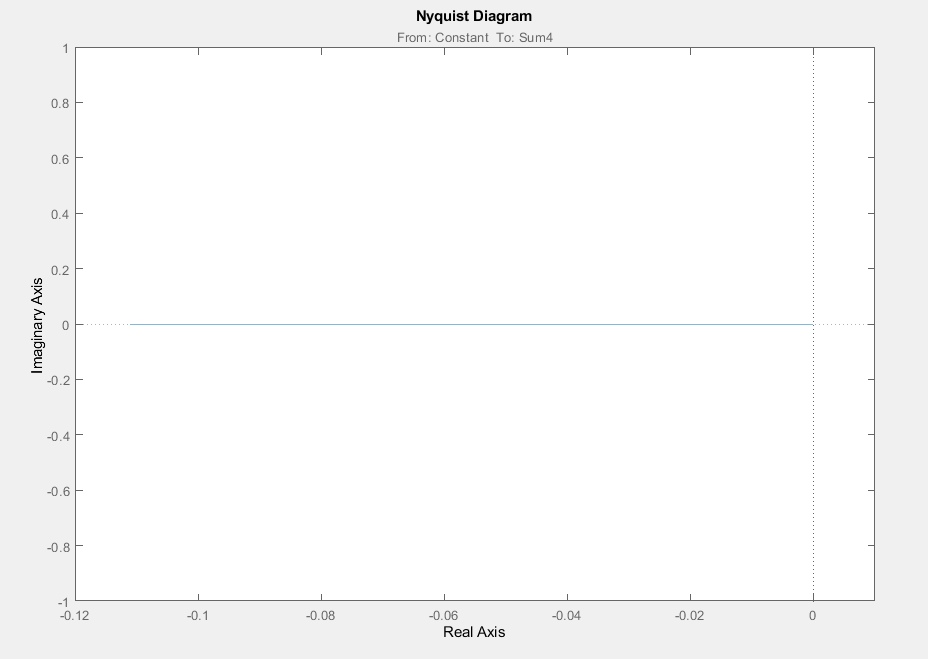
Рис. 27. АФХ.
Вывод: несмотря на нестандартный подход к решению поставленной задачи, удалось найти ПФ, удовлетворяющей условию задания. Исходя из вышеприведенных графиков можно сделать вывод о том, что системе необходим регулятор для компенсации возмущающего воздействия.