

ные методы исследования этой проблемы, так и летные исследования [3, 8]. В летных испытаниях с помощью фотооптических приборов расстояние измеряется в каждой из 6-ти “точек встречи”, в которых лопасти верхнего винта оказываются над лопастями нижнего винта при их относительном вращении с удвоенной угловой скоростью.
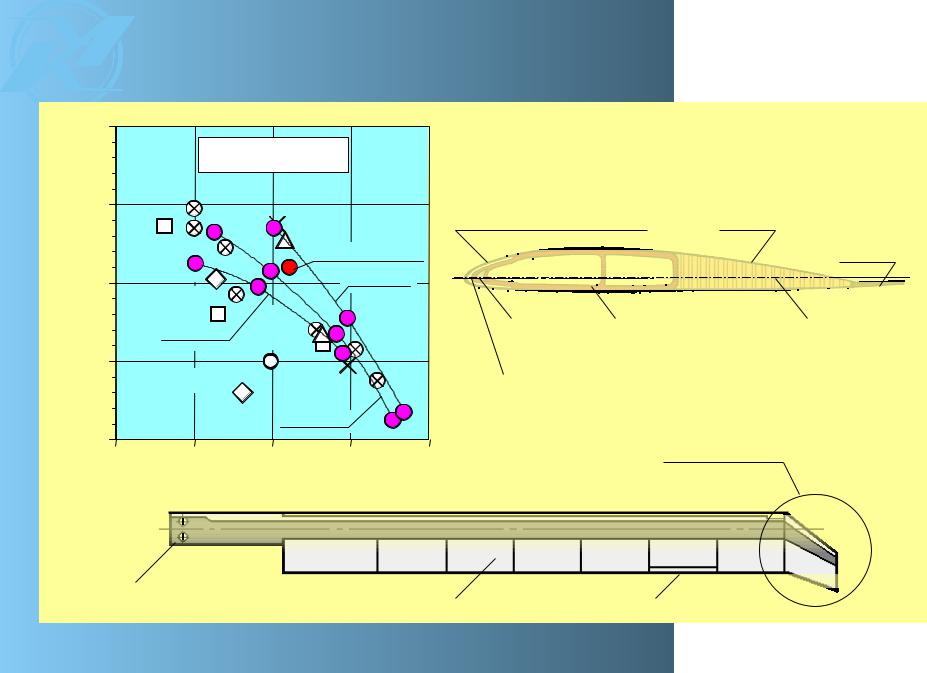
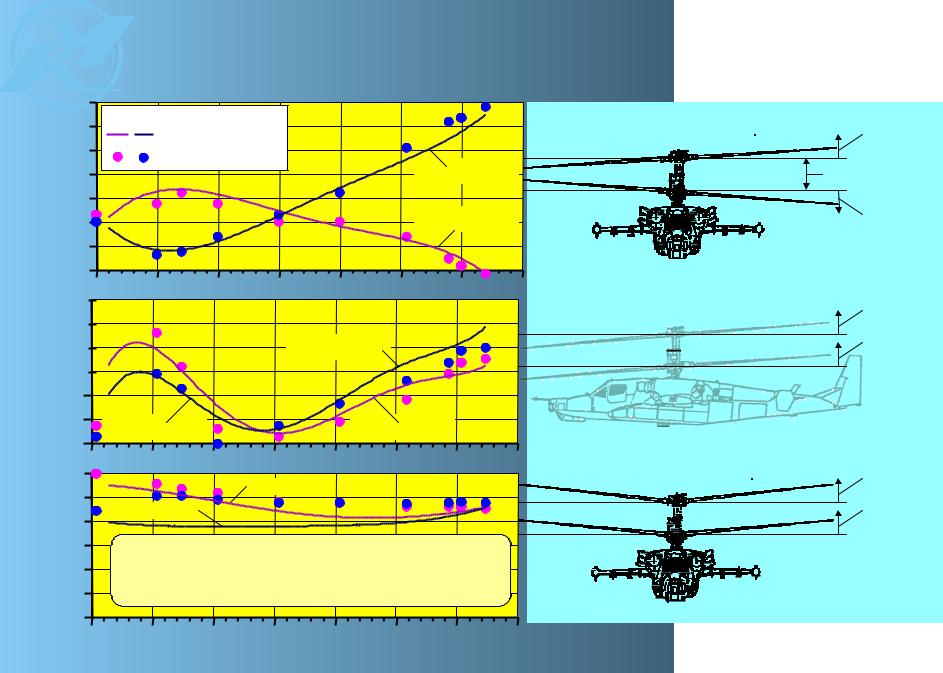
Ниже кратко описана механика явления сближения концов лопастей (Рис.20). На режиме висения плоскости концов лопастей верхнего и нижнего винтов параллельны. Расстояние между ними несколько больше конструктивного расстояния между втулками винтов (Н0).
Впоступательном полете возникают переменные по азимуту воздушные силы, которые вызывают маховое движение лопастей. В следствии этого в продольном направлении плоскости концов лопастей верхнего и нижнего винтов наклоняются на равные углы в направлении скорости полета (вперед или назад).
Впоперечном направлении ( при виде по полету ) плоскости концов лопастей наклоняются навстречу друг другу, вследствие противоположного направления вращения лопастей верхнего и нижнего винтов (Рис.20).
Поэтому на одной стороне диска расстояние между плоскостями концов лопастей уменьшается, а на противоположной – увеличивается. В поперечном направлении угол наклона плоскости концов лопастей примерно равен углу взмаха лопасти (влево / вправо) и зависит от режима полета (Рис.20). Как известно из аэромеханики, имеются зависимости между маховым движением лопасти и параметрами винта, особенно числом Локка, углом геометрической крутки лопасти и крутильной жесткостью лопасти / проводки управления.
Расчеты и результаты летных испытаний определили значения параметров соосных винтов, упомянутых выше, которые гарантируют приемлемое безопасное расстояние между концами лопастей.
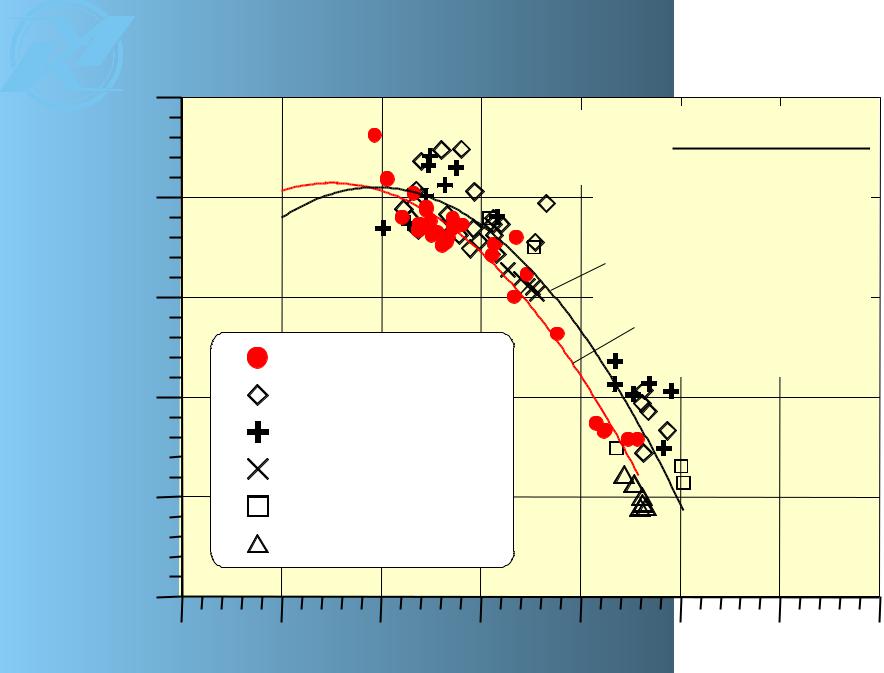
На Рис.20 показаны измеренные в ходе летных испытаний вертолета Ка-50 углы махового движения концов лопастей в сравнении с расчетными данными.
Обобщенные результаты измерений для горизонтального полета и маневров вертолета Ка50, представлены на Рис.21, Рис.22.
Приемлемые расстояния между концами лопастей соосного винта были обоснованы математическим моделированием и подтверждены результатами летных испытаний для всего утвержденного перечня маневров.
Приемлемые расстояния между концами лопастей нижнего винта и хвостовой балкой были проверены и обеспечиваются.
4.2.Особенности маневренности вертолета Ka-50
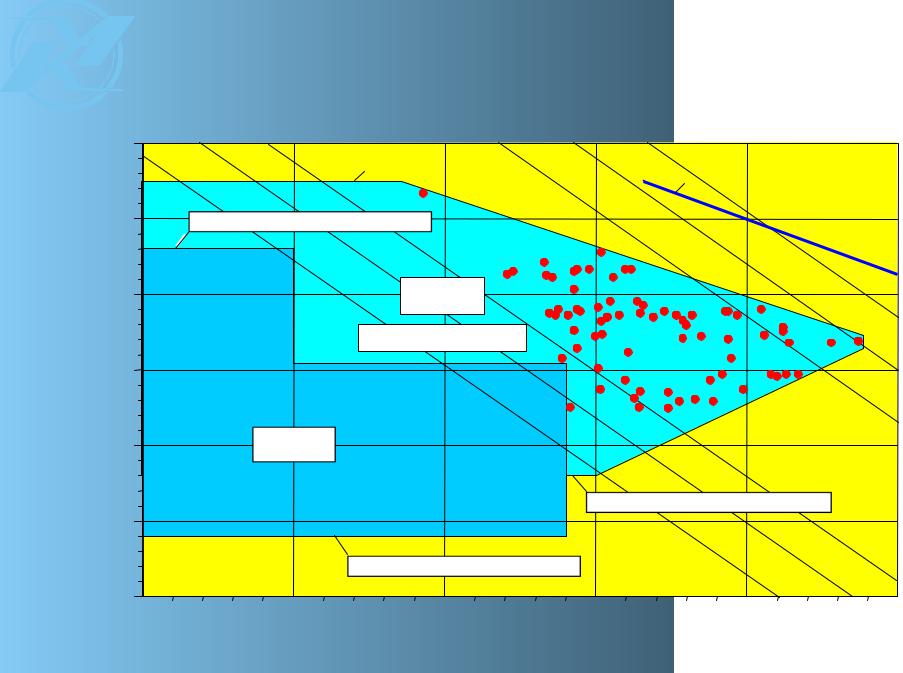
Зависимость – перегрузка / скорость полета вертолета Ka-50 была рассчитана и подтверждена результатами летных испытаний:
–в пределах эксплуатационных ограничений (тангаж, крен, частота вращения винта, нагрузки на лопастях, …);
–в пределах специальных ограничений акробатического пилотажа.
На Рис.23 представлена лишь часть точек летных испытаний, а именно:
для 2 < nY < 3.5 и для nY ≈ 0.
Каждая точка соответствует одному из выполненных маневров. Большая часть точек показана на Рис.23. Никакие из установленных ограничений не были превышены.
На Рис.23 также показаны данные летных испытаний вертолета “Tiger” [13].
Таблица на Рис.24 представляет параметры некоторых маневров в пределах специальных ограничений для акробатических показательных полетов. Особо следует отметить параметры "плоского разворота" и вывода из пикирования после “косой петли” ( nY ≈ 3.5 ).
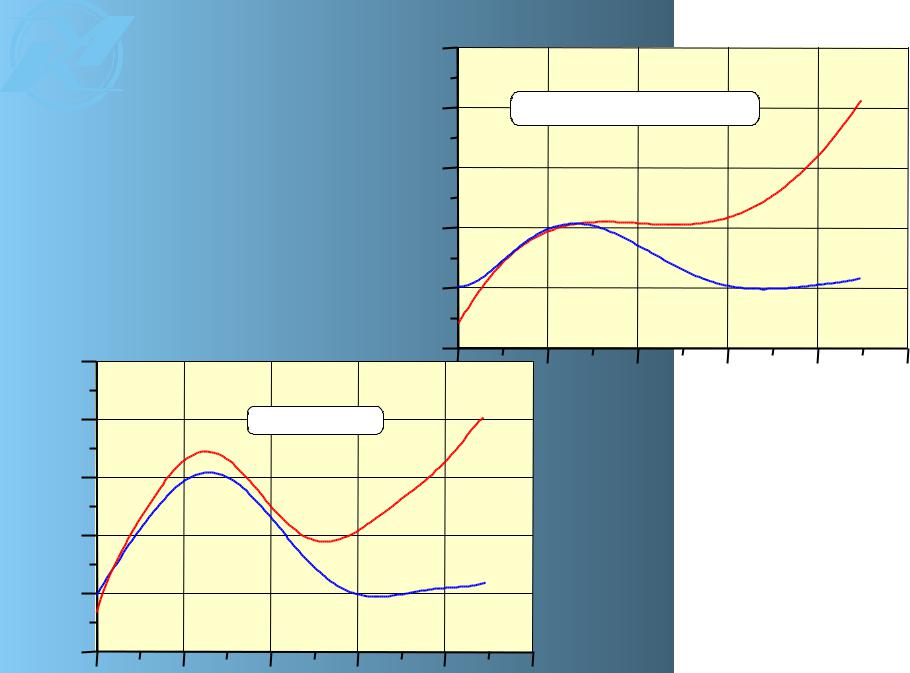
4.3.Средства контроля и анализа акробатического полета
Программное обеспечение NSTAR было создано, чтобы обеспечить обработку и анализ данных полета вертолета Ka-50. При использовании записей, сделанных испытательной кон- трольно-измерительной аппаратурой вертолета программное обеспечение NSTAR делает возможным восстановить траекторию маневра и вычислять дополнительные значения параметров полета [14].
Программное обеспечение NSTAR совместимо как с аппаратурой летных испытаний, так и со штатными бортовыми магнитными регистраторами. Результаты работы NSTAR используются для следующих целей:
–анализа действий и помощи в обучении пилотов;
–контроля ограничений критических параметров;
–как входные данные для математического моделирования.
Рис.25 представляет пример восстановления траектории “косой петли”.
5. Заключение
Основные проблемы аэромеханики и аэроупругости соосных винтов были исследованы и передовые конструкции были реализованы.
Передовые конструктивные решения определяют летные данные и маневренность вертолета.
4
6. Литература
1.Bourtsev, B.N., “Aeroelasticity of Coaxial Helicopter Rotor”, Proceedings of 17th European Rotorcraft Forum, Germany, Berlin, Sept. 1991.
2.Bourtsev, B.N., “The Coaxial Helicopter Vibration Reduction”, Proceedings of 18th European Rotorcraft Forum, France, Avignon, Sept. 1992.
3.Bourtsev, B.N., Selemenev, S.V., “The Flap Motion and the Upper Rotor Blades to Lower Rotor Blades Clearance for the Coaxial Helicopters”, Proceedings of 19th European Rotorcraft Forum, Italy, Como, 14 – 16 Sept. 1993.
4.Coleman, C.P., “A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic Research”, Proceedings of 19th European Rotorcraft Forum, Italy, Como, 14 – 16 Sept. 1993.
5.Akimov,A.I., Butov, V.P., Bourtsev, B.N., Selemenev, S.V., “Flight Investigation of Coaxial Rotor Tip Vortex Structure”, ASH 50th Annual Forum Proceedings, USA, Washington, DC, May 1994.
6.Акимов,А.И., Бутов, В.П., Бурцев, Б.Н., Селеменев, С.В., “Летные исследования и анализ вихревой структуры винтов соосного вертолета”, Российское Вертолетное Общество, Труды 1го Форума, Россия, Моск-
ва, 20 – 21 Сентября 1994.
7.Bourtsev, B.N., Gubarev, B.A., “A Ka-115 Helicopter a New Development of KAMOV Company”, Proceedings of 22nd European Rotorcraft Forum, Russia, Saint-Petersburg, 30 August – 1 Sept., 1995.
8.Bourtsev, B.N., Selemenev, S.V., “The Flap Motion and the Upper Rotor Blades to Lower Rotor Blades Clearance for the Coaxial Helicopters”, Journal of AHS, No1, 1996.
9.Bourtsev, B.N., Kvokov, V.N., Vainstein, I.M., Petrosian, E.A., “Phenomenon of a Coaxial Helicopter High Figure of Merit at Hover”, Proceedings of 23rd European Rotorcraft Forum, Germany, Dresden, 16 – 18 Sept. 1997.
10.Бурцев, Б.Н., Вайнштейн, И.М., Квоков, В.Н., Петросян,Э.А., “Феномен высокого коээфициента полезного действия соосных несущих винтов на режиме висения”, Российское Вертолетное Общество, Труды 3го Фору-
ма, Россия, Москва, 24 – 25 Марта 1998.
11.Bourtsev, B.N., Koptseva, L.A., Animitsa, V.A., Nikolsky, A.A., “Ka-226 Helicopter Main Rotor
– as a New Joint Development by KAMOV & TsAGI ”, Aviation Prospects 2000, International Symposium, Russia, Zhukovsky Moscow Region, 19 – 24 August 1997.
12.Бурцев, Б.Н., Копцева, Л.А., Анимица, В.А., Никольский, А.А., “Несущий винт вертолета Ка-226 – новая совместная разработка фирмы КАМОВ и ЦАГИ”, Российское Вер-
толетное Общество, Труды 3го Форума,
Россия, Москва, 24 – 25 Марта 1998.
13.Kurt Gotzfried, “Survey of Tiger Main Rotor Loads from Design to Flight Test”, Proceedings of 23rd European Rotorcraft Forum, Germany, Dresden, 16 – 18 Sept. 1997.
14.Bourtsev,B.N., Guendline,L.J., Selemenev, S.V., “Method and Examples for Calculation of Flight Path and Parameters While Performing Aerobatics Maneuvers by the Ka-50 Helicopter based on Flight Data Recorded Information”,
Proceedings of 24th European Rotorcraft Forum, France, Marseilles, 15 – 17 Sept. 1998.
15.Mikheyev,S.V., Bourtsev,B.N., Selemenev, S.V., “Ka-50 Attack Helicopter Aerobatic Flight”, Proceedings of 24th European Rotorcraft Forum, France, Marseilles, 15 – 17 Sept. 1998.
16.Mikheyev,S.V., Bourtsev,B.N., Selemenev, S.V., “Ka-50 Attack Helicopter Aerobatic Flight”, ASH 55th Annual Forum Proceedings, Canada, Montreal, 25 – 27 May 1999.
17.Самохин, В.Ф., Ермилов, А.М., Котляр, А.Д., Бурцев, Б.Н., Селеменев, С.В., “Импульсное акустическое излучение вертолета соосной схемы при крейсерских скоростях полета”,
Тезисы докладов на семинаре “Авиационная акустика”, Россия, Дубна Московской об-
ласти, 24 – 27 Мая 1999.
18.Bourtsev, B.N., Selemenev, S.V., Vagis V.P., “Coaxial Helicopter Rotor Design & Aeromechanics”, Proceedings of 25th European Rotorcraft Forum, Vol.1, Paper No.G22, Italy, Rome, 14 – 16 Sept. 1999.
5
|
|
|
|
Основные параметры |
|
|
||||||
|
соосных вертолетов фирмы KAMOВ |
|||||||||||
|
|
|
|
НАГРУЗКА НА МОЩНОСТЬ |
|
|
||||||
|
|
|
|
|
|
G MAX / N, [кГ/ л.с.] |
|
|
|
|
||
8 |
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
Ka - 8 |
Ka - 10 |
Ka - 15 |
Ka - 18 |
Ka - 26 Ka -126 Ka -226 Ka - 25 |
Ka - 32 Ka - 29 |
Ka - 50 |
Ka - 52 |
||||
|
7,1 |
7,1 |
5,2 |
5,3 |
5 |
4,5 |
3,7 |
4 |
2,9 |
2,6 |
2,5 |
2,6 |
|
|
МАКСИМАЛЬНАЯ СКОРОСТЬ |
|
|
|||||||
|
|
|
|
|
VMAX, [км / ч] |
|
|
|
|
||
350 |
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
250 |
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
150 |
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
0 |
Ka - 10 |
Ka - 15 Ka - 18 Ka - 26 Ka -126 Ka -226 Ka - 25 Ka - 32 Ka - 29 Ka - 50 |
Ka - 52 |
||||||||
Ka - 8 |
|||||||||||
80 |
115 |
150 |
150 |
160 |
190 |
200 |
220 |
250 |
280 |
310 |
300 |
Рис. 1
|
|
Основные параметры |
|
|
|||||||
соосных вертолетов фирмы KAMOВ |
|||||||||||
ОТНОСИТЕЛЬНОЕ РАССТОЯНИЕ МЕЖДУ ВТУЛКАМИ НЕСУЩИХ ВИНТОВ |
|||||||||||
|
|
|
|
|
|
H 0 / D |
|
|
|
|
|
0,1 |
|
|
|
|
|
|
|
|
|
|
|
0,08 |
|
|
|
|
|
|
|
|
|
|
|
0,06 |
|
|
|
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
|
|
|
|
0 |
Ka - 10 |
Ka - 15 Ka - 18 Ka - 26 Ka -126 Ka -226 Ka - 25 Ka - 32 Ka - 29 Ka - 50 Ka - 52 |
|||||||||
Ka - 8 |
|||||||||||
0,098 |
0,1 |
0,085 |
0,085 |
0,09 |
0,09 |
0,09 |
0,095 |
0,093 |
0,093 |
0,097 |
0,097 |
|
|
|
НАГРУЗКА НА ДИСК ВИНТА |
|
|
||||||
|
|
|
|
G MAX /(π |
R 2 ), |
[кГ / м 2 ] |
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
0 |
Ka - 10 Ka - 15 |
Ka - 18 |
Ka - 26 Ka -126 Ka -226 Ka - 25 Ka - 32 Ka - 29 |
Ka - 50 |
Ka - 52 |
||||||
Ka - 8 |
|||||||||||
13 |
14,8 |
18,7 |
19 |
24,5 |
24,5 |
25,6 |
37,5 |
63,5 |
57,9 |
65,4 |
73,1 |
Рис. 2
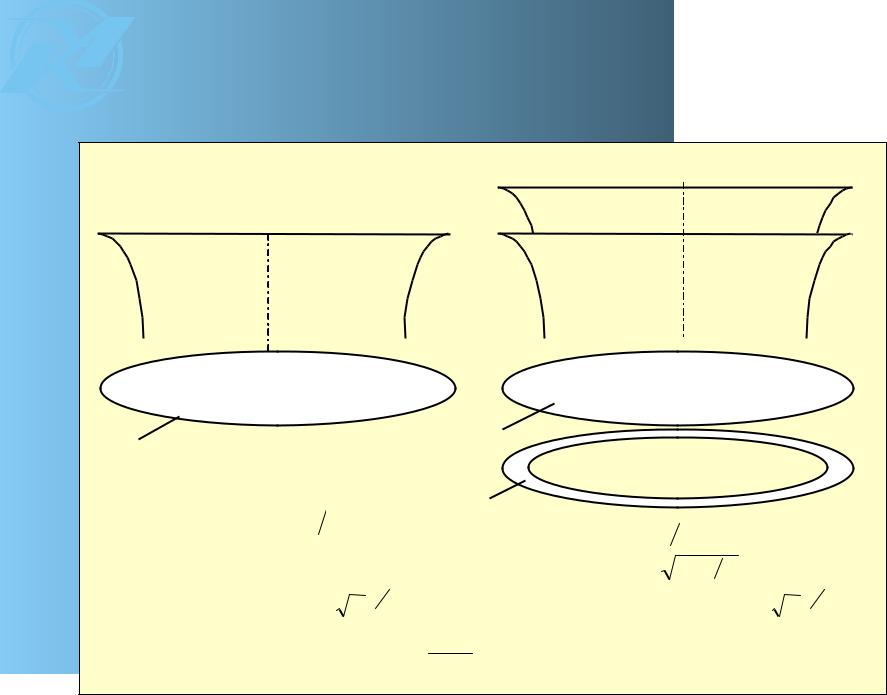
Одиночный и Соосный винты |
|
|||||||
площади активных дисков , эффективные диаметры , |
||||||||
мощность и тяга на висении |
|
|||||||
ОДИНОЧНЫЙ ВИНТ ( s ) |
R |
|
СООСНЫЙ ВИНТ ( c ) |
|
||||
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
0,85R |
|
|
|
0,78R |
|
|
|
|
0,91R |
|
|
|
F |
|
F |
|
|
|
|
|
|
Fs = F = π D2 4 |
δ F = 0,28F |
|
|
Fc = π D |
2 |
4 + δ F = 1,28 Fs |
||
|
|
|
|
|
|
|||
|
|
|
|
|
D EFF = |
|
4 Fs π = 1,13 D |
|
Ts = (33,25 η S D N ∆ )23 |
= DEFF η |
|
|
Tc = (33,25 η C D N ∆ |
)23 |
|||
η |
C |
S |
= |
η |
|
|
|
|
|
D |
|
1,13 S |
|
|
|
||
|
|
|
|
|
|
|
Рис. 3 |
|
|
|
|
|
|
|
|
|
|
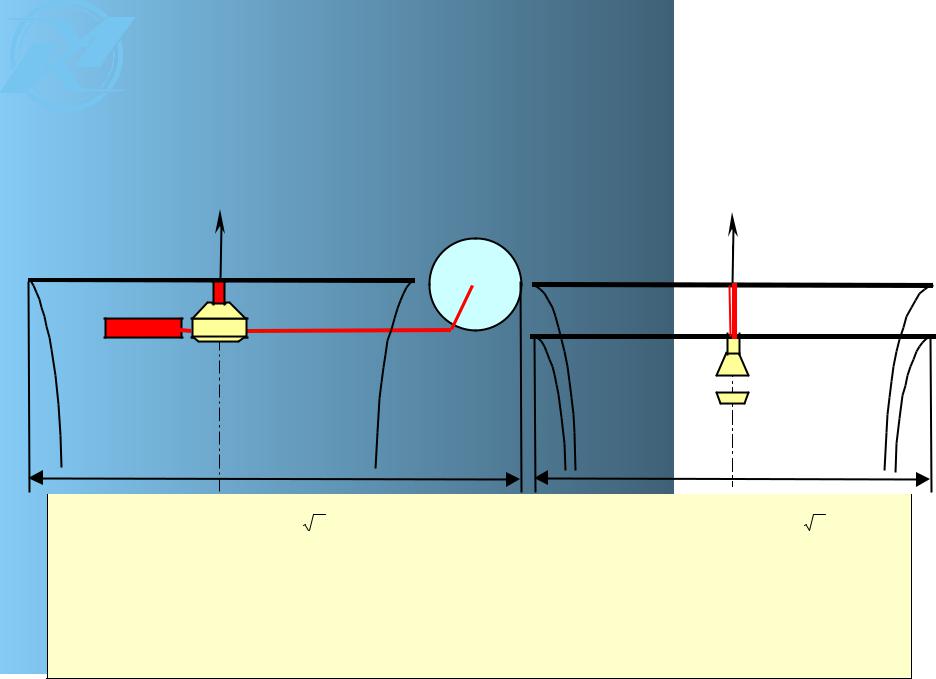
Одиновинтовой и Соосный вертолеты
диаметр несущего винтаРис, мощность. 4 и тяга на висении
ВЕРТОЛЕТ С РУЛЕВЫМ ВИНТОМ |
СООСНЫЙ ВЕРТОЛЕТ |
|
|
Ts |
Tc |
|
0,9N |
0,5N |
|
|
0,5N |
N |
NРВ = 0,1N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|||
|
Ls |
|
|
|
|
|
|
|
|
Lc |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Ts = ( 33,25 ηS Ds 0,9N |
∆ ) 2/3 |
|
|
|
|
Tc = ( 33,25 ηC Dc N ∆ ) 2/3 |
|
||||
|
При η c / η s = 1,13 |
и |
Nc = Ns = N и |
|
NPB= 0,1N: |
|||||||
|
1. При Dc = Ds |
отношение |
тяг |
Тc / Тs = |
(1,13 / 0,9)2/3 = 1,16 ; |
|
||||||
|
2. При Ts = Tc |
отношение диаметров Ds / Dc = |
1,13 / 0,9 = 1,26. |
|
||||||||
Рис. 4
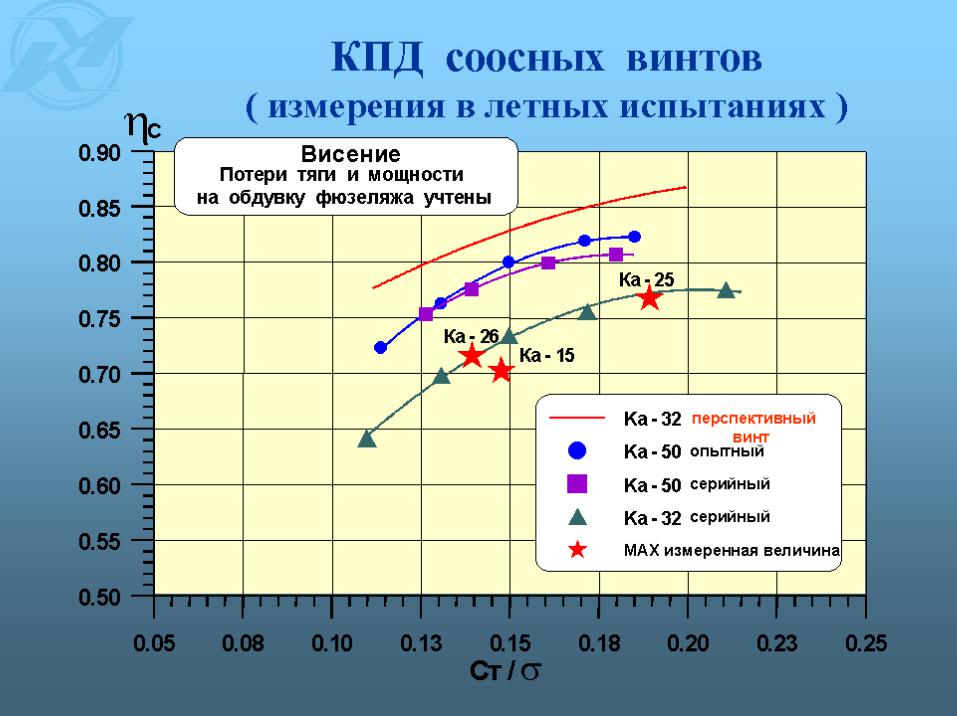
Рис. 5
ОСЕВАЯ КООРДИНАТА , y / R
|
Форма вихревого следа на висении |
||
|
|
Аппроксимация формы следа |
|
0.0 |
|
Рис. 6 |
|
|
|
|
|
|
y / R |
K1 |
Ка - 32 СООСНЫЙ ВИНТ |
|
K2 |
АППРОКСИМАЦИЯ ФОРМЫ СЛЕДА : |
|
|
|
Верхний винт : K1 = 0.0371 , K2 = 0.1028 |
|
|
|
|
Нижний винт : K1 = 0.0431 , K2 = 0.0854 |
0.2 |
|
|
|
2π
0.85
3
r / R
0.4
0.7
|
, r / R |
0.8 |
КООРДИНАТА |
|
|
0.9 |
РАДИАЛЬНАЯ |
|
r / R = A + ( 1 - A ) / ch ( n λ ψ )
Верхний винт : Нижний винт :
2 2
A = 0.82 , n = 2 |
Aнв/ Aвв= Cтвв/ Cтнв = 1.23 |
|
A = 0.91 , n = 4 |
||
|
0.6 |
|
|
|
|
|
|
|
|
|
|
|
1.0 |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
АЗИМУТАЛЬНЫЙ УГОЛ СЛЕДА , ψ ( ГРАД )
Рис. 6
СТАТИСТИЧЕСКАЯ ДИАГРАММА
Нагрузка на мощность - Нагрузка на диск - Относительный КПД для соосных вертолетов и вертолетов с рулевым винтом
Gmax / ( |
π |
|
|
Рис. 7Gmax < 13 000 [ кГ ] |
||||||||||
|
R2 ) , [ кГ / м 2 ] |
|
|
|
|
|
|
|
|
|||||
100 |
0.5 |
0.6 |
0.7 |
η c = 0.8 |
|
|
|
|
|
|
|
|
||
|
9 |
η |
s = 0.6 |
0.7 |
0.8 |
ОТНОСИТЕЛЬНЫЙ КПД |
||||||||
|
8 |
|
|
|
Ka-52 |
|
||||||||
|
7 |
|
|
|
|
|
( Висение , ∆ = 1) |
|
|
|||||
|
|
|
|
Ka-50 |
|
|
|
|
||||||
|
|
|
|
Ka-31,32 |
_____ ηC ≈ |
2 |
|
Gmax |
Gmax |
|||||
|
6 |
|
|
|
Ka-29 |
|||||||||
винта |
|
|
|
|
75 |
N |
πR |
2 |
∆ |
|||||
|
|
|
Ka-27 |
|
|
|
|
|
||||||
5 |
|
|
|
|
|
_ _ _ |
ηS ≈ |
2 |
G max |
G max |
||||
диск |
|
|
|
|
|
|
75 |
0,9 N |
πR 2 ∆ |
|||||
4 |
|
|
|
|
|
Ka-25 |
Г Т Д |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
на |
3 |
|
|
|
|
|
Ka-226 |
|
|
|
П Д |
|
||
Нагрузка |
|
Статистические данные |
|
|
(Airfoil TsAGI-4M) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Kамов /coосные/ |
|
Ka-126 Ka-26 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Aerospatiale |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
Agusta |
|
|
|
|
|
|
|
|
|
|
|
|
|
Bell |
|
|
|
|
Ka-15,18 |
|
|
|
|||
|
|
|
|
Hiller |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Hughes ( MDH ) |
|
|
|
|
|
|
|
|
Ka-10 |
|
|
|
|
|
Kaman |
|
|
|
|
|
|
|
|
||
|
|
|
|
MBB |
|
|
|
|
|
|
|
|
|
Ka-8 |
|
|
|
|
Mиль |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sikorsky |
0.3 |
0.4 |
|
|
|
|
|
|
||
|
|
|
|
Westland |
|
|
|
|
|
|
||||
|
10 |
|
|
0.3 |
0.4 |
0.5 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
|
|
3 |
4 |
5 |
|
|
6 |
7 |
8 |
||
|
|
|
|
|
|
|
||||||||
Gmax / N , [ кГ / л.с. ] - Нагрузка на мощность |
Рис. 7 |
Боковой вид формы вихревого следа соосного винта
для нескольких скоростей полета вне влияния земли
Рис. 8
Vвозд = 5 [км/ч]
Vвозд = 73 [км/ч]
Vвозд = 138 [км/ч]
Vвозд = 227 [км/ч]
Рис. 8
Положение передней границы вихревого следа
по скорости горизонтального полета
Рис. 9
Рис. 9
Моделируемые аэроупругие явления соосных несущих винтов
|
|
|
|
|
|
|
В Е Р С И И М О Д Е Л И |
||||
Моделируемыеявления |
Рис. 10 |
|
MFE |
||||||||
|
|
|
|
|
|
|
ULISS-6 ULISS-1 ULMFE FLUT |
||||
1 |
|
EIx (r/R,ω |
t) |
9 |
9 |
|
|
|
|||
|
EIy (r/R,ω |
t) |
|
|
|
||||||
|
|
GIp (r/R,ω |
t) |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
o=||υ ij||× |
|
|
9 |
|
|
9 |
9 |
|
ϕ |
M |
|
|
|
|||||||
3 |
|
|
Vi (r/R, ψ |
) |
|
9 |
|
|
|
|
|
4 |
|
Cy , Cxp , Cm |
9 |
9 |
9 |
|
|
||||
|
(α , α•, M, M)• |
|
|
||||||||
5 |
|
|
Cy_MAX |
|
|
|
9 |
9 |
9 |
|
|
|
|
(α , α•, M) |
|
|
|||||||
|
|
Аэроупругая |
|
|
|
|
|
||||
6 |
|
деформация |
9 |
9 |
9 |
9 |
|
||||
|
|
профиля |
|
|
|
|
|||||
|
|
|
лопасти |
|
|
|
|
|
|
|
|
7 |
|
|
Данные |
|
|
|
9 |
9 |
9 |
9 |
9 |
|
верхн. / нижн. |
||||||||||
|
|
|
винтов |
|
|
|
|
|
|
|
|
Рис. 10
Результаты аэроупругого моделирования соосных несущих винтов
Результаты |
|
В Е Р С И И М |
О Д Е Л И |
||||||
|
|
анализа |
|
|
Рис. 11 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
ULISS-6 ULISS- |
ULMFE |
FLUT MFE |
||||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
Граница |
соосные |
лопасть |
лопасть |
|
|
||
|
срывного |
|
винты |
|
|
||||
|
|
флаттера |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
Изгиб. моменты , |
соосные |
|
|
|
|
||
|
нагрузки проводки |
лопасть |
лопасть |
|
|
||||
|
управления , |
|
винты |
|
|
||||
|
|
нагрузки бустера |
|
|
|
|
|
|
|
3 |
|
Упругие |
соосные |
лопасть |
лопасть |
|
|
||
|
деформации |
|
винты |
|
|
||||
|
|
|
|
|
|
|
|
|
|
4 |
|
Переменные |
соосные |
|
|
|
|
||
|
нагрузки |
|
|
|
|
||||
|
|
винты |
|
|
|
|
|||
|
на втулках |
|
|
|
|
|
|||
5 |
|
Расстояние |
соосные |
|
|
|
|
||
|
между концами |
|
винты |
|
|
|
|
||
|
|
лопастей |
|
|
|
|
|
|
|
6 |
|
Флаттер в летных |
соосные |
лопасть |
лопасть |
|
|
||
|
испытаниях |
|
винты |
|
|
||||
|
|
|
|
|
|
|
|
|
|
7 |
|
Флаттер |
соосные |
|
|
лопасть |
|||
|
в наземных |
|
|
||||||
|
|
винты |
|
|
|||||
|
|
|
|
|
|
|
|
||
|
|
испытаниях |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
Собственные |
|
|
|
лопасть |
|
лопасть |
|
|
частоты |
|
|
|
|
|
|
||
Рис. 11
Аэродинамические характеристики существующих аэродинамических профилей ЦАГИ-2, ЦАГИ-4
и перспективного профиля ЦАГИ-4M
Рис. 12
CУ 2.0
1.5
1.0
0.5 |
|
|
|
|
|
|
|
|
|
|
0 |
M=0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0.2 |
-0.1 |
0.0 |
0.0 |
0.0 |
0.0 |
|
0.0 |
0.0 |
0.1 |
|
|
|
|
Cm ( 0.25 хорды ) |
|
|
|
|
. 12 |
||
|
|
|
|
|
|
|
|
|
Рис |
|
Су MAX AT ( M = 0.4 )
Аэродинамический профиль лопасти
1.8 |
|
|
|
|
|
Рис. 13 |
|
|
||
|
|
ПРОФИЛИ |
|
|
Ka-50 Аэродинамический профиль |
|||||
1.6 |
RAE9645 |
OA313 |
|
|
|
|
|
Антиэррозионная кромка |
Обшивка |
|
OA213 |
|
VR-12 |
|
|
|
Задняя |
||||
|
|
|
|
|
|
|
|
|
||
|
OA312 |
|
DM-H4 |
|
|
|
|
кромка |
||
|
|
Ka-50 профиль |
|
|
|
|||||
1.4 |
NACA-23012 |
|
|
|
ЦАГИ-4 |
|
|
|
|
|
|
OA212BFM |
|
|
|
|
|
Углепластиковый |
|
||
|
RAE9648 |
OA309 |
|
|
|
|
||||
|
ЦАГИ-2 |
|
OA209 |
|
Балансировочный |
лонжерон |
Соты |
|||
1.2 |
|
SC 1095 |
DM-H3 |
|
|
|
|
|||
|
RAE9634 |
|
OA207 |
груз |
|
|
||||
|
NACA-0012 |
|
VR-15 |
|
Нагревательный |
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
1.0 |
|
|
|
ЦАГИ-3 |
|
|
элемент |
|
|
|
|
0.75 |
0.80 |
0.85 |
0.90 |
Стреловидная законцовка |
|||||
0.70 |
|
|
|
|||||||
|
|
MDD AT |
( Сy= 0 ) |
|
|
|
|
|
||
Узел крепления лопасти |
Хвостовая секция |
Триммерная пластина |
Рис. 13

Модель проводки управления несущими винтами вертолета Ka-32
Рис
Модель проводки управления несущими винтами вертолета Ka-50
Рис. 14
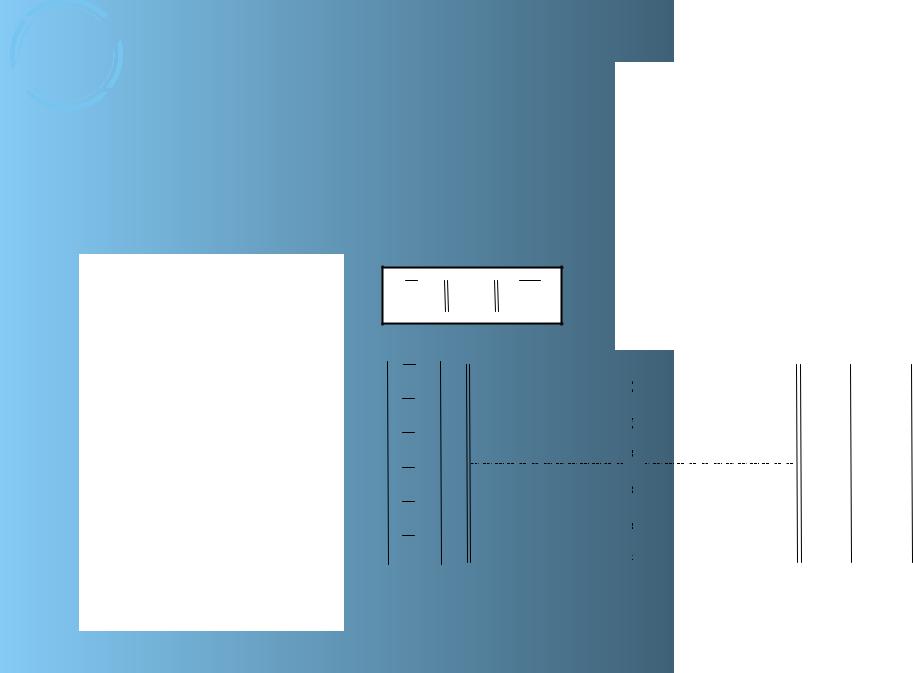
 Схема эксперимента по определениюРис. 15
Схема эксперимента по определениюРис. 15
матрицы податливости проводки управления
ϕ = ϑ I,J × M
ϕ |
1 |
|
ϑ |
11 |
ϑ |
12 |
ϕ |
2 |
|
ϑ |
21 |
ϑ |
22 |
ϕ |
3 |
= |
ϑ |
31 |
ϑ |
32 |
ϕ |
ϑ |
|
ϑ |
|
||
4 |
|
41 |
42 |
|||
ϕ |
5 |
|
ϑ |
51 |
ϑ |
52 |
ϕ |
6 |
|
ϑ |
61 |
ϑ |
62 |
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
13
23
33
43
53
63
 ϑ
ϑ
 ϑ
ϑ
 ϑ
ϑ

 ϑ
ϑ
 ϑ
ϑ
 ϑ
ϑ
14
24
34
44
54
64
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
15
25
35
45
55
65
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
16 |
|
M1 |
|
26 |
× |
M 2 |
|
36 |
M 3 |
||
|
|||
46 |
|
M 4 |
|
56 |
|
M 5 |
|
66 |
|
M 6 |
Рис. 15
Матрица податливости
|
АППРОКСИМАЦИЯ : ϑ I,J (ψ 1LR ) = f ( TC, TK, TПОП,ТПР, ТВАП, ТОШ, ТВОШ, ψ 1LR ) |
|||||||||||||||||||
|
|
KАЧJ KАЧI |
Рис. 16 |
|
|
|
|
|
|
|||||||||||
|
ВЫЧИСЛЕНИЕ : |
|
|
{TK [KAI |
|
(Sinϕ I |
+ Cosϕ I )− 1] [KAJ (Sinϕ J + Cosϕ J )− 1]+ |
|||||||||||||
|
ϑ I,J (ψ |
1LR ) = ρ |
ПJ |
ρ |
ПI |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
Cosϕ J + ТПР Sinϕ I |
Sinϕ J )}+ ТС + ТВАП + ϑ 0 I,J ; |
||||||||||
|
|
+ KAI |
KAJ (ТПОП Cosϕ I |
|||||||||||||||||
|
ТОШ |
2ТОШ |
|
|
ψ |
1LR |
+ |
ОП |
− π |
− 2π |
(I |
− |
1); |
I |
= |
1, 2 , ... , K |
||||
|
|
|
|
|
|
2 |
K |
|
|
|||||||||||
ϑ 0 = |
2ТОШ |
4ТОШ + ТВОШ |
; ϕ I = |
|
|
(ψ |
|
|
|
|
|
|
π |
2π |
|
|
||||
|
|
|
|
|
|
2π − |
1LR + |
ОП + DFI)− 2 |
− K (I − K − 1); I |
= K + 1, ... , 2K |
||||||||||
Главные жесткости матрицы податливости и динамические жесткости из частотных испытаний
|
Mϕt + ϑ −1ϕ = 0 |
1000 |
|
C1 ; 1/λ K , |
кГм / рад |
|
||||
|
ϕ = u e |
ipt |
|
2 тон |
|
|
|
1/λ 2 |
|
|
|
|
500 |
|
|
|
|
1/λ 1 |
|
||
|
2 |
|
1 тон |
|
|
|
|
|||
(ϑ M − E / PK ) u = 0 |
|
|
|
|
|
|
||||
|
|
1/λ - |
расчет собственных чисел |
|
||||||
|
PK2 = 1/(λ K I) |
0 |
|
C1 - частотные испытания Ка-32 |
|
|||||
ИЗМЕРЕННЫЕ ЖЕСТКОСТИ ПРОВОДКИ |
|
|
|
|
|
|
||||
|
-200 |
-100 |
|
0 |
100 |
200 |
||||
УПРАВЛЕНИЯ НЕСУЩИМИ ВИНТАМИ Ка-32 |
Ψ |
|||||||||
|
|
1нв , град |
Рис. 16 |
|||||||
|
|
|
|
|
|
|
|
|
||
Скорость конца лопасти, ΩR [м/с]
|
|
|
Диапазон |
скоростей винтов |
|||||||
260 |
|
|
|
Рис. 17 |
|
|
|
|
|||
|
0.9 |
Число М конца лопасти ( МСА, уровень моря ) |
1.02 |
|
|||||||
|
0.92 |
|
0.98 |
1.0 |
|
|
|||||
|
|
|
|
maх.Переходные: 255[м/с] (98%) |
|
|
|
|
|
||
|
0.88 |
|
|
|
|
|
|
||||
250 |
|
|
|
|
|
|
Расчет: НЕТ ФЛАТТЕРА |
||||
maх.Переходные: 246[м/с](98%) |
|
|
|
|
|
|
|||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||
240 |
Ka-50 |
 - Ка-50 летные испытания
- Ка-50 летные испытания
230
220 Ka-32
min.Переходные: 216[м/с] (83%)
210
min.Переходные:208[м/с](83%)
200 |
200 |
250 |
300 |
350 |
400 |
150 |
V_возд, [км/ч]
Рис. 17
Коэф. тяги винта
Cт/ σ |
Граница срывного флаттера |
||
0.5 |
Рис. 18Cт/ σ |
= |
nу. G |
|
|||
|
|
|
|
0.4 |
|
|
ρ / 2.Fв.( Ω R )2 |
|
Граница флаттера ( теория ) |
||
|
|
||
|
Новые профили DMH4, DMH3 |
||
|
TIGER, EC135, BO105 KWS |
||
0.3 |
|
Ka - 50 летные испытания |
|
|
|
||
|
Ка-50 летные испытания |
|
( аппроксимация ) |
|
|
|
|
0.2 |
TIGER , PAH2 / HAC |
|
|
|
TIGER , HAP |
|
|
0.1 |
EC135 Stress Flights |
|
|
WG13 Lynx Record |
|
|
|
|
Dauphin DGV Test |
|
|
0.0
0.0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
|
Относительная скорость , |
|
|
Рис. 18 |
|||
g, м/сeк
|
0.25 |
|
|
|
Вертикальные Рис. 19 |
Базовый |
|||
вариант |
||||
|
0.20 |
В центре тяжести |
||
|
|
|||
вибрации |
0.15 |
|
|
|
с частотой 3ω |
0.10 |
|
снижены |
|
|
|
|
Вибрации |
|
|
0.05 |
|
|
|
g, м/сeк2 |
0.00 |
|
|
0.25 |
|
||
0 |
50 |
||
|
|||
|
В кабине |
Базовый |
|
0.20 |
вариант |
||
|
0.15
0.10
Вибрации
снижены
0.05
0.00
0 |
50 |
100 |
150 |
200 |
250 |
V, км/ч
100 |
150 |
200 |
250 |
V, км/ч
Вертолетет KaKa -- 2525
Рис. 19
B1 [мм]
A1 [мм]
Ao [мм]
Коэффициенты махового движения конца лопасти Сравнение расчетов и результатов испытаний
500 |
ВВ НВ |
Level Flight |
Рис. 20 |
14500 мм |
|
|
Горизонтальный полет |
|
|||
400 |
|
- Ka-50 аппроксимация |
B1_ВВ < 0 |
||
300 |
|
летных испытаний |
|
|
|
200 |
|
- ULYSS-6 расчеты |
Нижний винт |
|
H0 = 1400 мм |
|
|
|
100 |
Верхний винт |
|
|
|
B1_НВ > 0 |
|
0 |
ψ |
= 90° |
ψ |
|||
= 270° |
||||||
-100 |
|
|
|
|
|
-200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ψ - Азимут нижнего винта |
|
|
600 |
0 |
|
50 |
|
100 |
|
150 |
|
200 |
250 |
300 |
350 |
|
|
||||||
|
|
|
|
|
|
A1_ВВ > 0 |
||||||||||||||
500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1_НВ > 0 |
|
400 |
|
|
|
|
|
|
|
|
Нижний винт |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
Нижний винт |
|
|
|
|
|
Верхний винт |
|
ψ |
= 180° |
ψ |
= 0° |
|||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
600 |
0 |
|
50 |
|
|
100 |
|
150 |
|
200 |
250 |
|
300 |
350 |
|
|
A0_ВВ > 0 |
|||
500 |
|
|
|
|
|
|
|
Верхний винт |
|
|
|
|
|
|
|
|
|
|
||
|
Нижний винт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A0_НВ > 0 |
||||
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
(ψ |
) |
|
|
|
• Cos ψ |
|
|
|
|
Sin ψ |
|
|
|
|
|
||
300 |
|
Y |
_ ВВ |
0_ВВ |
|
1_ВВ |
1_ВВ |
• |
+ . . . |
|
|
|
||||||||
|
|
|
= A |
+ A |
+ B |
|
|
|
|
|||||||||||
200 |
|
Y |
_ НВ |
(ψ |
) |
0_НВ |
1_НВ |
• Cos ψ |
1_НВ |
• Sin ψ |
+ . . . |
|
|
|
||||||
|
|
|
= A |
|
+ A |
|
+ B |
) |
|
|
|
|||||||||
100 |
|
Расстояние: |
|
H(ψ )= H0 + Y_ВВ (ψ |
|
- Y_НВ (ψ |
) |
|
|
|
||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
50 |
|
|
100 |
|
150 |
|
200 |
250 |
|
300 |
350 |
|
|
|
|||
V_возд, [км/ч]
Рис. 20
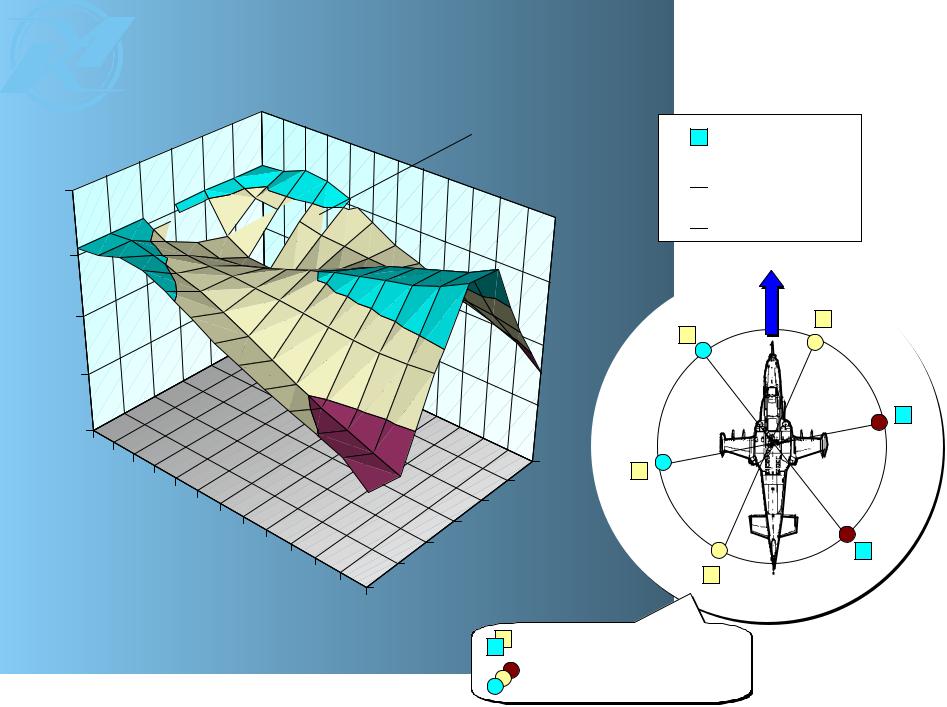
Расстояние между концами лопастей верхнего и нижнего винтов
в зависимости от скорости полета и азимута лопасти
H, 
2000


 •
•

1500
1000
500
0
0
50 |
|
|
100 |
|
|
150 |
|
167 |
|
200 |
|
|
|
|
VВОЗД , км/ч |
250 |
47 |
|
300 |
|
|
|
Аппроксимация 1500-2000 испытаний

 1000-1500
1000-1500

 500850-1000-
500850-1000-
Г о р и зз оо нн тт аа лл ьь нн ыы йй
П О Л Е ТТ |
|
227° |
167° |
|
47 287° |
107° |
287
47°
град. |
347° |
ψ = 0° |
- VВОЗД ≈ |
70 |
км/ч |
|
- VВОЗД ≈ |
300 |
км/ч |
Рис. 21 |
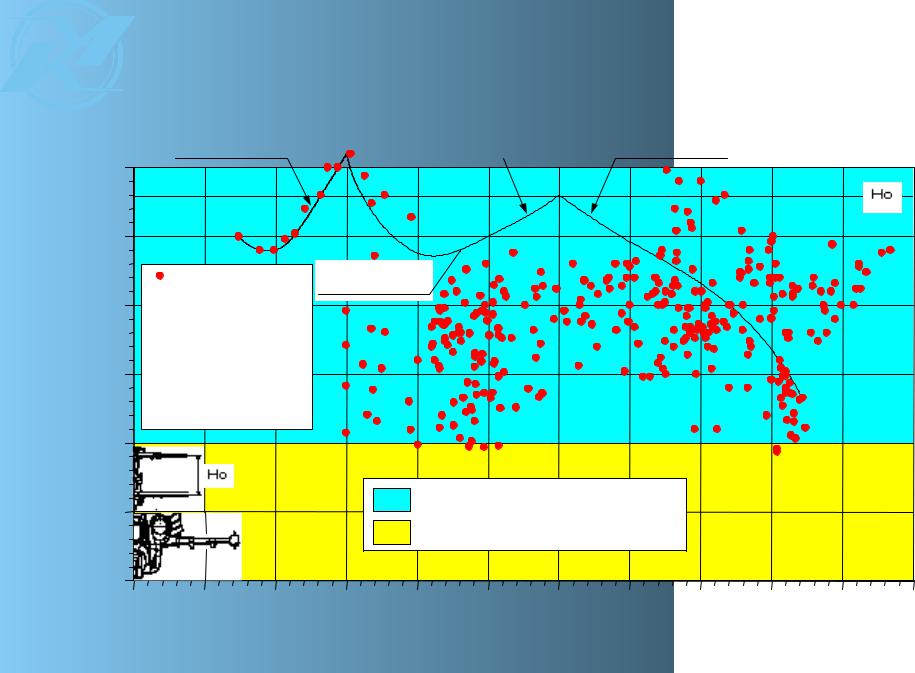
Измеренные расстояния, Н_min [мм]
Измеренные расстояния между концами лопастей
|
верхнего и нижнего винтов |
|||
ψ = 47°, 107° |
← | → |
Рисψ = 227°, 287.° |
22 |
ψ = 47°, 107° |
По правому борту |
По левому борту |
← | → |
По правому борту |
|
1500
Ho
1250 |
|
|
|
- Ка-50 летные испытания |
|
1000 |
МАНЕВРЫ : |
|
- ГОРКА |
||
|
||
|
- ПЛАНИРОВАНИЕ |
|
|
- ВЫХОД ИЗ ПИКИРОВАНИЯ |
|
750 |
- ФОРС. ВИРАЖ |
|
- БОЕВОЙ РАЗВОРОТ |
-БЫСТРОЕ ТОРМОЖЕНИЕ
-ВВОД-ВЫВОД ИЗ КРЕНА
-КОСАЯ ПЕТЛЯ
500
250
0
-150 -100 -50
Горизонтальный полет
( аппроксимация )
ИЗМЕРЕННЫЕ РАССТОЯНИЯ ДЛЯ ВСЕХ РЕЖИМОВ ( при спецограничениях для акробатического полета )
ЗАПАС РАССТОЯНИЯ : Н = 500 [мм]
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
400 |
V_возд, [км/ч]
Рис. 22
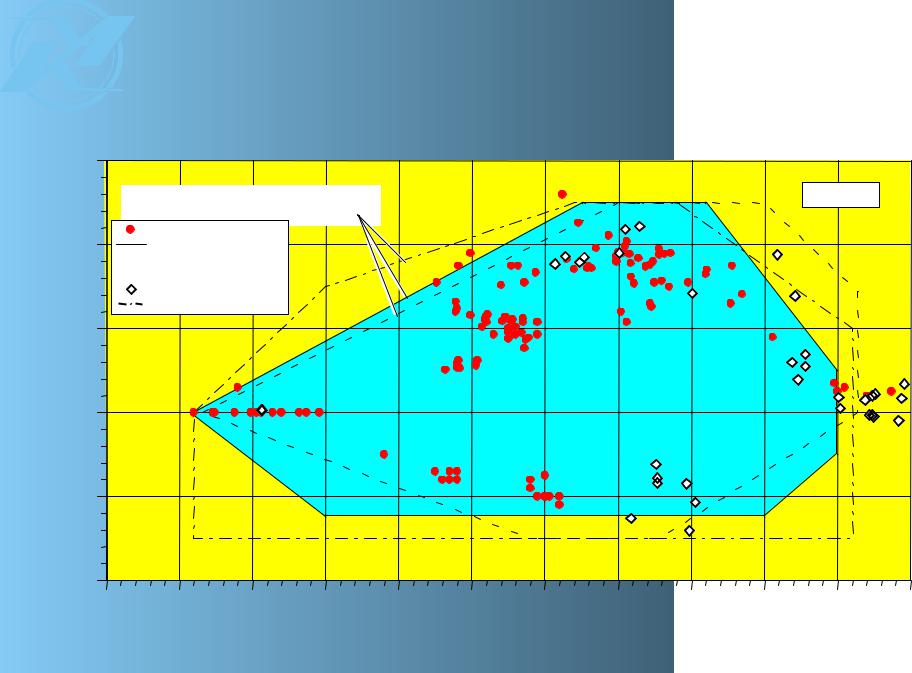
Коэффициент перегрузки Пу, [-]
Огибающие зависимостей коэффициента перегрузкиРис. 23от скорости полета
4
|
|
|
МСА |
|
Огибающие ( Пу - Vвозд ) |
уровень моря |
|
|
|
||
3 |
- Kа-50 летные испытания |
|
|
Kа-50 |
(G=9800[Kг]) |
|
|
|
- - - - AH-64A (G=6650[Kг]) |
|
|
|
- Tiger летные испытания |
|
|
|
Tiger |
(G=5400[Kг]) |
|
2
1
0
-1
-150 |
-100 |
-50 |
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
400 |
|
|
|
|
|
V_возд, [км/ч] |
|
|
|
|
|
|
Рис. 23
Маневры демонстрационных полетов Ka-50
|
|
Рис. 24 |
|
|
|||
|
|
|
|
||||
|
ИЗМЕРЕННЫЕ ПАРАМЕТРЫ ( MAX / MIN ) |
|
|
||||
МАНЕВРЫ |
|
|
|
|
ОПИСАНИЕ |
||
Воздушная |
Коэффициент перегрузки |
Углы |
Углы |
||||
|
cкорость |
|
Пу |
|
тангажа |
крена |
|
|
Vвозд, [км/ч] |
|
[-] |
|
[град] |
[град] |
|
Форсированный |
|
|
|
|
|
|
Неустановившийся |
вираж |
280 ÷ 60 |
1.0 → |
2.9 |
→ 2.0 |
20 ÷ 50 |
0 ÷ - 70 |
вираж |
( правый / левый ) |
|
|
|
|
|
|
с тангажом и креном |
Плоский |
|
|
|
|
|
|
Величина |
разворот |
220 ÷ 0 |
1.0 → |
1.5 |
→ 1.0 |
± 5 |
± 20 |
скольжения |
( правый / левый ) |
|
|
|
|
|
|
± 80 ÷ ± 90 [град.] |
Разворот |
|
|
|
|
|
|
|
на горке |
280 ÷ 0 |
1.0 → 2.9 → |
1.0 |
→ 2.9 → 1.0 |
0 ÷ 90 |
± 90 |
|
( правый / левый ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ввод, |
Пикирование |
0 ÷ 390 |
1.0 → 0.25 → 2.9 → 1.0 |
0 ÷ - 90 |
± 30 |
пикирование, |
||
|
|
|
|
|
|
|
вывод |
Косая |
|
|
|
|
|
|
|
петля |
280 ÷ 70 |
1.0 → 2.9 → |
1.2 |
→ 3.5 → 1.0 |
0 ÷ 360 |
± 150 |
|
( правая / левая ) |
|
|
|
|
|
|
|
Быстрое |
|
|
|
|
|
|
Тангажом / креном |
торможение |
150 ÷ 40 |
1.0 → 2.0 → 1.2 → 1.0 |
0 ÷ 40 |
± 55 |
торможение |
||
( правое / левое ) |
|
|
|
|
|
|
|
Горка |
|
|
|
|
|
|
Разгон на хвост |
хвостом |
- 90 ÷ 0 |
1.0 → |
1.5 |
→ 1.0 |
0 ÷ - 70 |
± 10 |
и горка |
вперед |
|
|
|
|
|
|
хвостом вперед |
|
|
|
|
|
|
|
|
Рис. 24
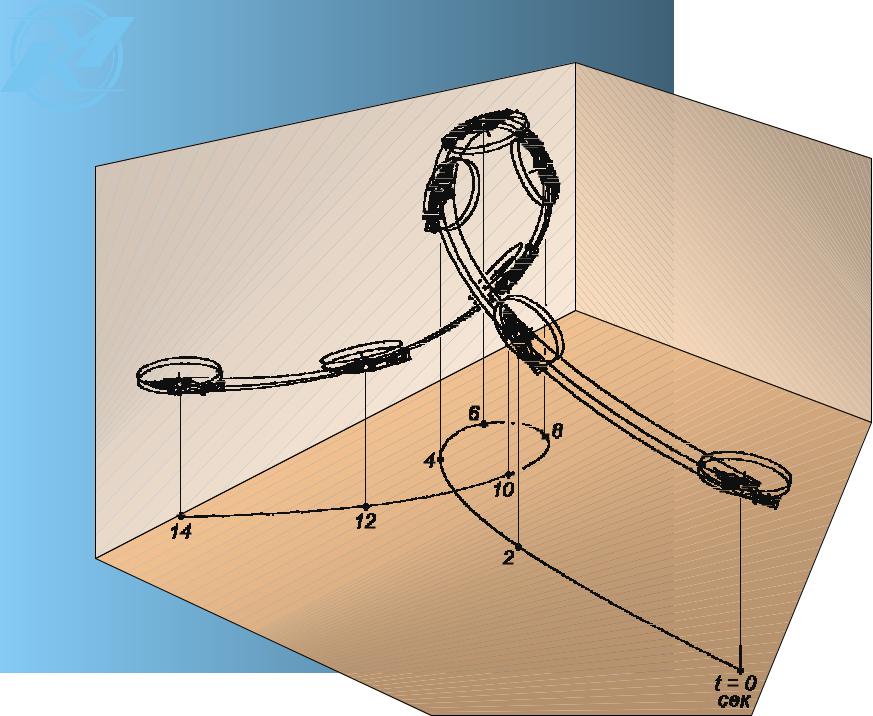
Траектория полета при косой петлее (( правойправой))
Вид на северо-запад от наблюдателя
Рис. 25