

roboty_lab2
.pdfОтчет по лабораторной работе № 2
по дисциплине «Робототехника и гибкие автоматические производства»
на тему: «Анализ устойчивости и синтез корректирующего устройства следящей системы с абсолютно жесткой кинематической передачей»
Цель работы
Оценка частотных свойств разомкнутой следящей системы с абсолютно жесткой кинематической передачей (оценка условий устойчивости и косвенная оценка динамических свойств). Синтез последовательного корректирующего устройства для обеспечения требуемого качества переходного процесса.
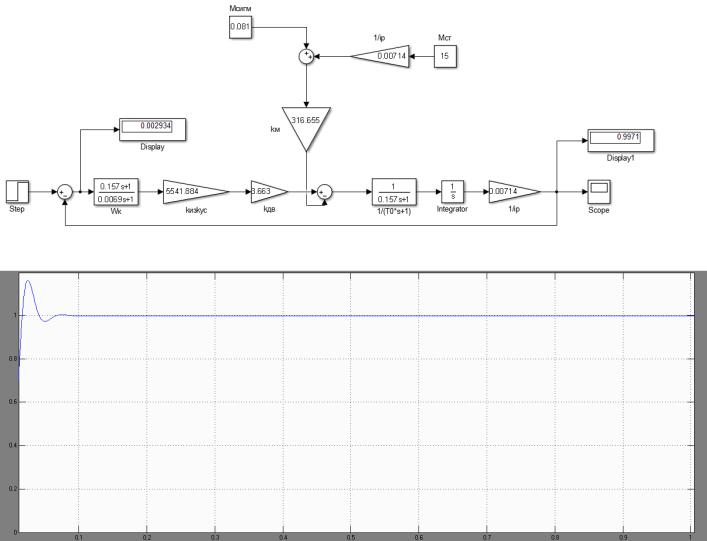
1.Проведем моделирование работы следящей системы с использованием Matlab (Simulink) и числовых данных из лабораторной работы № 1.
Рисунок 1 – Моделируемая в Matlab схема нескорректированной системы
2.Зафиксируем вид переходного процесс в нескорректированной системе по углу поворота нагрузки при отработке ступенчатого сигнала уставки величиной 1 рад.
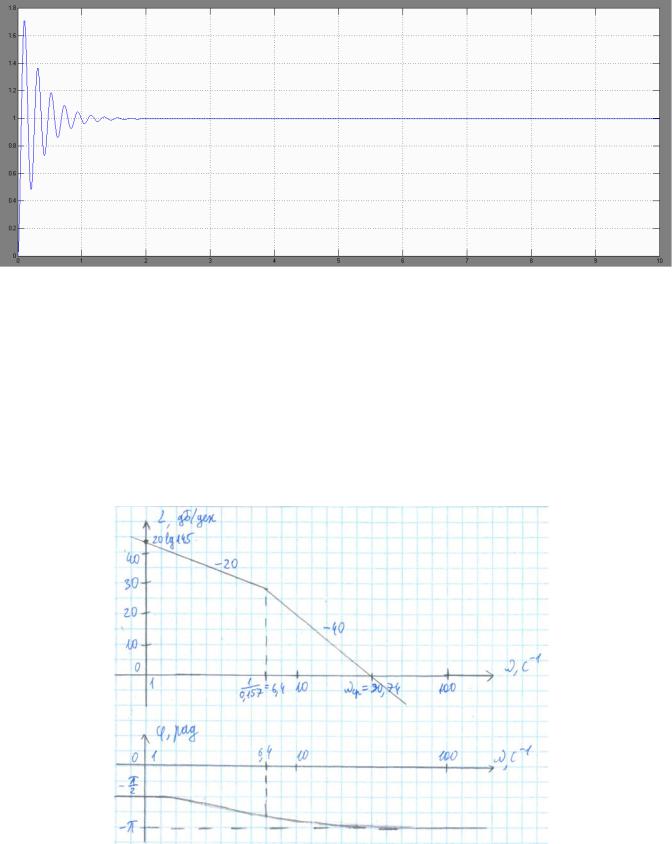
Рисунок 2 – Переходной процесс в нескорректированной системе Из рис. 2 видно, что переходной процесс представляет собой затухающие
колебания. Наибольшее колебание достигает значения 1,7. Переходной процесс затухает в течение примерно 2 с.
3.Сопоставим качество переходного процесса с видом ЛАЧХ и ФЧХ разомкнутой системы без коррекции, которые были построены в п. 5 Задания к лабораторной работе № 1.
Рисунок 3 – Асимптотическая ЛАЧХ и ФЧХ из лабораторной работы № 1
Низкочастотная часть ЛАЧХ связана с работой системы в установившихся режимах, среднечастотная характеризует качество работы системы в переходных режимах, высокочастотная определяет начальный участок переходного процесса.
2

Из рис. 2 видно, что значение установившейся ошибки достаточно мало, следовательно, низкочастотную область ЛАЧХ не нужно корректировать. Время затухания переходного процесса можно уменьшить путем увеличения частоты среза, располагающейся в области средних частот.
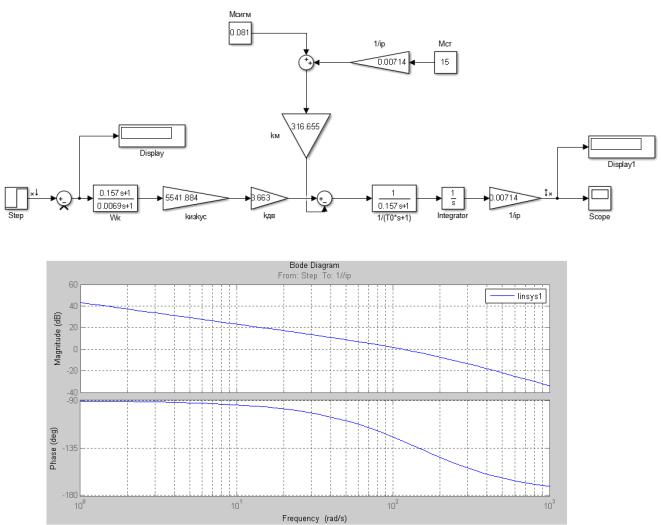
4.Используя Simulink, построим диаграммы Боде разомкнутой нескорректированной системы.
Рисунок 4 – Моделируемая в Matlab схема нескорректированной системы
Рисунок 5 - Диаграммы Боде разомкнутой нескорректированной системы Из рис. 5 видно, что запас по фазе приблизительно равен 10 градусам, следовательно, замкнутая система устойчива, но запас по фазе мал.
Из рис. 3, 5 видно, что общий вид асимптотической ЛАЧХ и ФЧХ, построенных в лабораторной работе № 1, и вид ЛАЧХ и ФЧХ, построенных с помощью Matlab, совпадает.
3
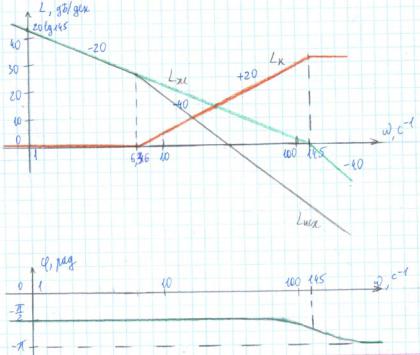
5.Рассчитаем параметры последовательного корректирующего устройства так, чтобы ЛАЧХ скорректированной системы имела излом асимптоты с -20
дб/дек на -40 дб/дек на частоте среза равной коэффициенту разомкнутой системы (145 рад/с).
На рис. 6 представлены асимптотические ЛАЧХ исходной нескорректированной системы (Lисх), скорректированной системы (Lж), звена коррекции (Lк) и ФЧХ скорректированной системы.
Рисунок 6 – Асимптотические ЛАЧХ и ФЧХ Передаточная функция звена коррекции:
 , где
, где
Tк = 1/kp = 1/145 = 0,0069 с
4
6. Проведем моделирование скорректированной системы.
Рисунок 7 – Моделируемая в Matlab схема скорректированной системы
Рисунок 8 – Переходной процесс в скорректированной системе Из рис. 8 видно, что для системы характерен переходной процесс с перерегулированием, перерегулирование составляет приблизительно 15 %. Переходной процесс затухает за 0,1 с.
Установившаяся ошибка без учета погрешности измерителя рассогласования составляет = 0,00293.
Установившаяся ошибка с учетом погрешности измерителя рассогласования составляет = δсист + δизм = 0,00293 + 0,00611 = 0,00904 рад
5
7. Построим диаграммы Боде для разомкнутой скорректированной системы.
Рисунок 9 – Моделируемая в Matlab схема скорректированной системы
Рисунок 10 - Диаграммы Боде разомкнутой скорректированной системы Из рис. 10 видно, что запас по фазе приблизительно равен 50 градусам, следовательно, замкнутая система устойчива, запас по фазе достаточно большой. Из рис. 6, 10 видно, что общий вид теоретических асимптотических ЛАЧХ и ФЧХ скорректированной системы, и вид ЛАЧХ и ФЧХ, построенных с помощью Matlab, совпадает.
6