

neuro_lab8
.pdfОтчет по лабораторной работе № 8
по дисциплине «Нейрокомпьютеры и их применение»
на тему «Нейросетевая система управления нестационарным объектом»
Цель работы: изучить применение нейросетевой модели объекта совместно с алгоритмом кумулятивных сумм для обнаружения изменения параметров объекта управления.
Выполнение
1.Задать параметры исходного объекта, нейросетевую модель объекта управления и
исходный линейный регулятор. Длительность моделирования – 2000 отсчетов. Определить исходную дисперсию ошибки идентификации σ02.
Структурная схема системы:
Параметры исходного объекта:
Уставка и помеха – цветной шум с передаточными функциями фильтра:

Параметры регулятора:
Модель объекта:
Определим значение σ0:
σ0 = 0,581097
2

2.Выбрать другие параметры исходного объекта, при которых контур сохраняет
устойчивость. Длительность моделирования – 2000 отсчетов. Определить дисперсию ошибки идентификации при номинальной разладке σ12.
Изменим параметры объекта:
Убедимся, что контур полученного объекта устойчив:
Определим значение σ1:
σ1 = 0,582711
3
3.Задать нестационарный объект управления с изменением параметров в момент
времени t =1000. Параметры объекта должны отличаться от заданных в п.2. В параметрах АКС задать дисперсии σ02, σ12, интервал второго обнаружения должен быть равен -1. В ряде экспериментов подобрать значение решающей границы, обеспечивающее безошибочное и быстрое обнаружение разладки.
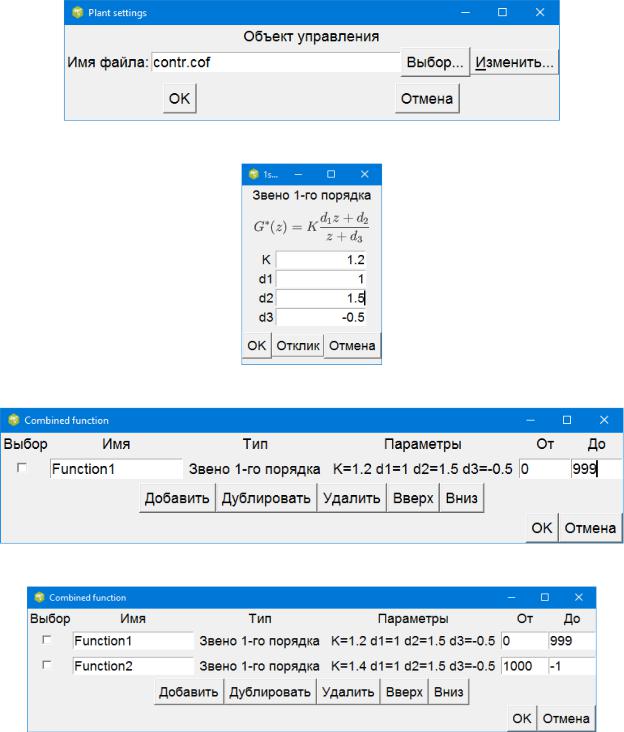
Находим в папке для сеанса 001 объект contr.tf и копируем его в текущий сеанс. Затем изменяем его расширение tf на cof и на схеме выбираем этот объект:
Теперь добавляем и редактируем его (изменить тип звена – добавить звено 1-го порядка):
Получилось следующее:
Еще раз добавляем и редактируем, итог:
Для каждого заданного объекта проверяем отклик на step (щелчок в окне по строчке с параметрами объекта – отклик – step), чтобы убедиться, что он устойчив.
4

Затем устанавливаем параметры АКС, полученные в предыдущих пунктах (сигмы – это параметр stdev или корень из соответствующих дисперсий):
Для решающей границы 2,5:
За время до 1000 отсчетов ложных срабатываний не наблюдалось. Первая разладка (превышение 2,5) обнаружена при 1814 отсчете (определили по графику путем изменения масштаба).
5

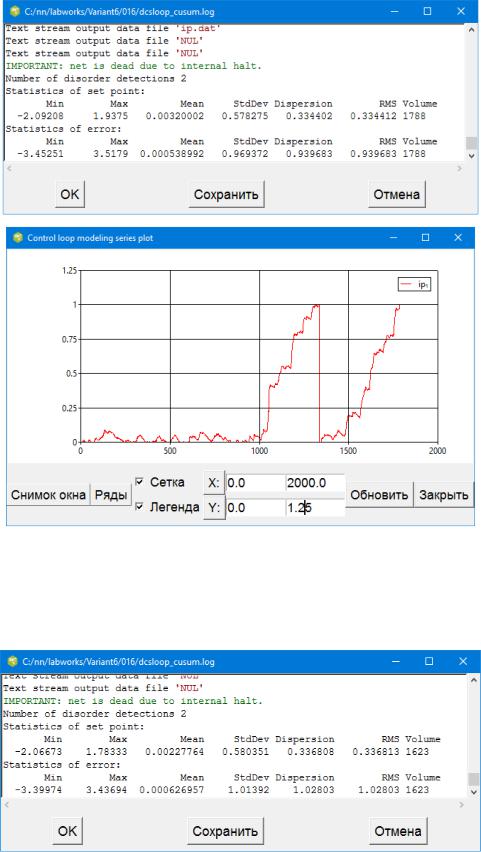
При решающей границе 1:
За время до 1000 отсчетов ложных срабатываний не наблюдалось. Первая разладка (превышение 1) обнаружена при 1266 отсчете.
При решающей границе 0,05:
6

Первая разладка (превышение 0,05) обнаружена при 44 отсчете, следовательно, происходит ложное срабатывание.
Из трех рассмотренных случаев видно, что наиболее быстрое обнаружение разладки, которое не является ложным, происходит при решающей границе 1.
4.Задать положительный интервал второго обнаружения разладки. Моделирование будет останавливаться, если разладка будет обнаружиться дважды в пределах временного интервала данной длительности.
Зададим интервал повторного обнаружения разладки 2000:
Результаты:
7
За время до 1000 отсчетов ложных срабатываний не наблюдалось. Первая разладка обнаружена при 1336 отсчете.
При повторном запуске:
8

За время до 1000 отсчетов ложных срабатываний не наблюдалось. Первая разладка обнаружена при 1325 отсчете.
При втором повторном запуске (при тех же параметрах):
9

За время до 1000 отсчетов ложных срабатываний не наблюдалось. Первая разладка обнаружена при 1395 отсчете.
Таким образом, моделирование было остановлено при обнаружении двух разладок до достижения 2000 отсчетов, ложных срабатываний не было, следовательно, АКС функционирует надежно.
Вывод
На лабораторной работе было изучено применение нейросетевой модели объекта совместно с алгоритмом кумулятивных сумм для обнаружения изменения параметров объекта управления.
10