

neuro_lab5
.pdfОтчет по лабораторной работе № 5
по дисциплине «Нейрокомпьютеры и их применение»
на тему «Синтез нейросетевого оптимального регулятора»
Цель работы: лабораторная работа посвящена задаче синтеза нейросетевого оптимального регулятора (НОР). В ней изучаются принципы применения нейронных сетей в качестве регулятора и модели объекта управления. Исследуется влияние архитектуры нейронной сети на скорость и качество обучения.
Выполнение
1.Моделирование САУ с линейным регулятором в контуре со ступенчатой уставкой без помехи.
Вид структурной схемы САУ:
Параметры объекта управления:
Параметры линейного ПИД-регулятора:

Сигнал уставки:
2

Сигнал помехи отсутствует (представляет собой постоянную 0):
Графики входного и выходного сигналов, сигнала ошибки:
3

Из графика видно, что перерегулирование составляет примерно 25 %.
Результаты моделирования:
СКО ≈ 0,424
2.Моделирование САУ с линейным регулятором в контуре с целью сбора данных для обучения.
Для формирования обучающей и контрольной выборок возьмем передаточные функции объекта и регулятора из первого пункта
Обучающая выборка:
Устанавливаем:
4

Сигнал уставки (случайный равномерный, макс. амплитуда – 1, длина ряда - 1000):
Сигнал помехи (случайный равномерный, макс. амплитуда – 0.1, длина ряда - 1000):
5

График выходного и входного сигналов:
Результаты моделирования:
6

Контрольная выборка
Устанавливаем:
Графики рядов сигналов уставки и помехи соответственно (случайный равномерный, макс. амплитуда – 1/0.1, длина ряда - 100):
7

Графики выходного и входного сигналов:
Результаты моделирования:
3.Обучение НС-Р вне контура на созданных обучающей и контрольных выборках.
8
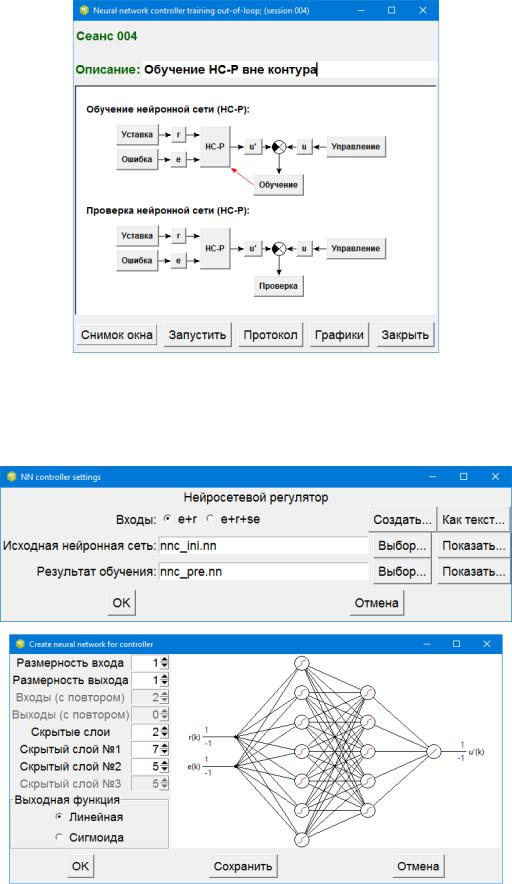
Вид структурной схемы НС-Р вне контура объекта управления:
Обучим различные варианты архитектуры НС-Р (наилучшей будет та архитектура, при которой наименьшие ошибки на обучающей выборке LearnMSE и тестовой выборке
TestMSE)::
1 архитектура:
9

График ошибок обучения:
2 архитектура:
10