

38_Зворотна задача_3 курс_2021
.pdfМІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ “ЛЬВІВСЬКА ПОЛІТЕХНІКА”
АНАЛІТИЧНЕ РОЗВ’ЯЗАННЯ ПОДВІЙНОЇ ОБЕРНЕНОЇ ФОТОГРАММЕТРИЧНОЇ ЗАСІЧКИ ДЛЯ СТЕРЕОЗНІМКІВ НАБЛИЖЕНИМ СПОСОБОМ
МЕТОДИЧНІ ВКАЗІВКИ
до розрахунково-графічної роботи з дисципліни "Фотограмметрія та дистанційне зондування, частина 2"
для студентів спеціальності 193 Геодезія та землеустрій
Затверджено на засіданні кафедри
фотограмметрії та геоінформатики.
Протокол № X (XXX) від XX.XX.2019 р.
Львів –2019
Аналітичне розв’язання подвійної оберненої фотограмметричної засічки для стереознімків наближеним способом: Методичні вказівки до розрахунково-графічної роботи з дисципліни «Фотограмметрія та дистанційне зондування, частина 2» для студентів спеціальності 193 Геодезія та землеустрій / Укл. М.Т. Процик, Н.З Грицьків, Л.В. Бабій – Львів, 2019.– 14 с.
Укладачі |
Процик М.Т., к.т.н., доцент |
|
Грицьків Н.З., ст. викл. |
|
Бабій Л.В., ст. викл. |
Відповідальний за випуск |
Дорожинський О.Л., д-р техн. наук, проф. |
Рецензент |
Глотов В.М. д-р техн. наук, проф., |
Зміст та обсяг роботи Мета роботи: поглиблення і закріплення теоретичних знань з розділу
«Аналітичне розв’язання подвійної оберненої фотограмметричної засічки для стереопари знімків» та набуття практичних навиків з при її розв’язанні наближеним способом.
На виконання роботи відводиться 12 год. з яких 4 год. відводиться на самостійну роботу студентів.
При розв’язанні оберненої подвійної фотограмметричної засічки для побудови моделі і визначенні за нею просторових координат точок необхідно виконати такі процеси:
побудова зв'язок проектуючих променів;
взаємне орієнтування знімків;
побудова фотограмметричної моделі місцевості;
орієнтування фотограмметричної моделі відносно системи координат місцевості за опорними точками (зовнішнє орієнтування);
визначення просторових координат контурних точок аерознімків в системі координат місцевості.
Для реалізації поставленої задачі використовують макетні знімки, при опрацюванні результатів фотограмметричних вимірів використовується базисна система елементів взаємного орієнтування, а просторові координати контурних точок визначають в топоцентричній системі координат.
1. Послідовність виконання роботи
1.Опрацювати теоретичний матеріал за наступними літературними джерелами: [1, с.39-44, 95-107; 2, с.33-36, 72-91; 3, с.45-63; 4, с.76-83; 5,
с.98-111; 6, розділ V «Обернена подвійна фотограмметрична засічка»].
2.Дати письмові відповіді на контрольні питання та завдання.
3.Виконати обчислення у відповідності до змісту.
Список рекомендованої літератури
1.Дорожинський О.Л. Основи фотограмметрії. Підручник.-Львів: Видавництво НУ «Львівська політехніка», 2003.-214с.
2.Дорожинський О.Л. Аналітична та цифрова фотограмметрія. Навчальний посібник.-Львів: Видавництво НУ «Львівська політехніка»,
2002.-164с.
3.Дорожинський О.Л., Тукай Р. Фотограмметрія. Підручник.-Львів: Видавництво НУ «Львівська політехніка», 2008.-332с.
4.Рудий Р.М. Прикладна фотограмметрія. Навчальний посібник.-К.: НМК ВО, 1991.-169с.
5.Лобанов А.Н., Буров М.И., Краснопевцев Б.В. Фотограмметрия: Учебник для ВУЗов.-М.:Недра, 1987.-309с.
6.Процик М.Т. Фотограмметрія та дистанційне зондування (частина 1): Конспект лекцій [текст].
3
2. Контрольні запитання
1.Що таке повздовжній та поперечний паралакси? В яких задачах фотограмметрії їх використовують?
2.Що визначають елементи взаємного орієнтування пари знімків? Скільки елементів взаємного орієнтування?
3.Які існують системи елементів взаємного орієнтування? Що приймається за умовно-горизонтальне положення в цих системах?
4.Покажіть на рисунку елементи взаємного орієнтування в різних системах. Дайте визначення кожному елементу.
5.Отримайте матриці напрямних косинусів з використанням елементів взаємного орієнтування для базисної системи.
6.Сформулюйте умову взаємного орієнтування пари знімків, та запишіть її математично у вигляді векторно-скалярного добутку, в матричній та координатній формах.
7.Обґрунтуйте стандартну схему розміщення точок для визначення елементів взаємного орієнтування.
8.Виведіть наближені формули для визначення елементів взаємного орієнтування для базисної системи, використовуючи умову рівності трансформованих координат.
9.Що визначають елементи зовнішнього орієнтування фотограмметричної моделі? Скільки елементів зовнішнього орієнтування
фотограмметричної моделі?
10.Покажіть на рисунку елементи зовнішнього орієнтування фотограмметричної моделі. Дайте визначення кожному елементу.
11.Запишіть формули зв’язку між координатами точок в зовнішній системі координат і фотограмметричної моделі. Поясніть величини що входять в ці формули.
12.Як у задачі розв’язання подвійної оберненої фотограмметричної засічки для стереопари знімків позбутись трьох елементів зовнішнього орієнтування – координат точки фотографування у зовнішній системі координат. Які величини вводять їм на заміну?
3. Вхідні дані, необхідне приладдя та матеріали
результати фотограмметричних вимірювань, отримані за даними макетних аерознімків у масштабі 1: аерофотоапаратом з фокусною віддаллю , для якого елементи внутрішнього орієнтування 0 = 0 = 0;
каталог координат опорних точок в топоцентричній системі координат.
4
4. Порядок та теоретично-методичні настанови
1. Аналіз та підготовка вхідних даних Отримавши вхідні дані слід заповнити відповідні таблиці, які наведені в
додатках (таблиці 1-2). Тут записують виміряні на макетних знімках координати та паралакси точок стереопари знімків {1, 1, , } у плоских прямокутних системах координат знімків 1 1 1 і 2 2 2.
Перехід від координат точок на лівому знімку до координат цих точок на правому знімку виконують за формулами:
2 = 1 − } (1)
2 = 1 −
2. Побудова фотограмметричної моделі.
Фотограмметрична модель місцевості це сукупність окремих точок, отриманих в результаті попарного перетину однойменних променів двох зв'язок. Для побудови такої моделі необхідно виконати внутрішнє та взаємне орієнтування знімків і визначити фотограмметричні координати точок отриманої моделі.
Аналітична побудова фотограмметричної моделі передбачає попереднє вимірювання координат і паралаксів точок стереознімків, а саме: точок, які розміщенні в стандартних зонах для визначення елементів взаємного орієнтування, опорних точок – для зовнішнього орієнтування моделі відносно вибраної системи координат місцевості, та контурних точок – для визначення їх просторових координат в координатній системі місцевості.
Під час внутрішнього орієнтування моделі в кожну координату вводять поправку за розташування головної точки знімка відносно центру знімка, тобто величини 0, 0:
|
|
|
|
|
= ′ |
− |
|
|
|
|
|
|
|
|
|
0 |
}, |
|
(2) |
|
|
|
|
|
= ′ |
− |
|
||
де ′, ′ |
|
|
|
|
0 |
|
|
|
|
- виміряні на знімках координати. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Оскільки в даному випадку для макетних знімків елементи внутрішнього |
|||||||||
орієнтування |
|
0 |
= 0 = 0, то |
етап |
внутрішнього |
орієнтування |
моделі не |
||
виконують. |
|
|
|
|
|
|
|
|
|
Порядок |
|
опрацювання |
даних |
для |
аналітичної |
побудови |
|||
фотограмметричної моделі такий: визначають елементи взаємного орієнтування знімків стереопари; виконують трансформування координат точок за елементами взаємного орієнтування; обчислюють фотограмметричні координати за формулами прямої фотограмметричної засічки.
2.1. Визначення елементів взаємного орієнтування.
Вхідною інформацією для визначення елементів взаємного орієнтування в базисній системі координат {1, 1, 2, 2, 2} є такі фотограмметричні дані:
– фокусна віддаль АФА; , – модулі абсцис та ординат точок знімка, які розташовані за стандартною схемою і – поперечні паралакси на цих точках.
Для визначення ЕВзО наближеним методом використовують формули:
5
1 = |
|
|
|
(6 |
− 4), |
2 |
= |
|
|
|
|
|
|
(5 − 3), |
|
||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
2 |
|
2 |
|
||||||||||||||||||||||||
|
|
= |
|
|
|
( |
|
+ |
+ |
|
+ |
|
|
− 2 |
− 2 |
), , |
(3) |
||||||||||
2 |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
42 |
|
|
3 |
|
|
4 |
5 |
|
6 |
|
|
|
|
1 |
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
= |
|
|
|
|
− |
2 |
, |
|
|
= |
|
|
|
|
− |
1 |
, |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
} |
|
||||||||||||||
|
|
1 |
|
|
2 |
|
|
|
|
|
2 |
|
|
2 |
|
|
|
||||||||||
де відстані і приймають як середнє модулів відстаней між точками лівого знімка, розташованими за стандартною схемою:
= |
| л3− л1|+| л1− л5|+| л4− л2|+| л2− л6| |
, |
|
|||
|
4 |
|
|
|
||
|
|
|
|
} |
(4) |
|
|
= |
| л1− л2|+| л3− л4|+| л5− л6| |
||||
|
|
|
||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
Обчислені значення елементів взаємного орієнтування заносять в таблицю 3 додатків.
2.2. Обчислення трансформованих координат опорних та контурних точок аерознімків стереопари.
Трансформування знімка – це перехід від нахиленого до горизонтального знімка, а в координатній формі – це перехід від координат точок на нахиленому знімку до координат цих же ж точок на знімку горизонтальному. Інакше – у кожну координату треба ввести поправку за кути нахилу. Для цього використовують напрямні косинуси. У формули для визначення напрямних
косинусів |
(5) |
підставляють |
елементи |
взаємного |
орієнтування |
|||||
{1, 1, 2, 2, 2} , отримані в пункті 2.1. |
|
|
|
|
|
|||||
|
|
|
|
a1 cos cos sin sin sin , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 cos sin sin sin cos , |
|
|
|
|
||
|
|
|
|
a3 sin cos , |
|
|
|
|
|
|
|
|
|
|
b1 cos sin , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b2 cos cos , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|
|
|
|
|
b3 sin , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c1 sin cos cos sin sin , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 sin sin cos sin cos , |
|
|
|
|
||
|
|
|
|
c3 cos cos , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отримані значення напрямних косинусів для лівого і правого знімків |
|||||||||
заносять у таблицю 4. |
|
|
|
|
|
|
||||
|
Наступний |
крок – визначають |
просторові |
координати |
|
|
|
та |
||
|
X1 |
, Y1 , Z1 |
||||||||
|
|
|
точок лівого і правого знімків в системах координат 1 1 1 1 |
та |
||||||
X 2 |
, Y2 , Z |
2 |
||||||||
2 2 2 2.
6

|
|
x1 |
|
X |
|
|
x2 |
|
|
|
|
|
|
|
|||||
X1 |
|
|
2 |
|
|
|
|||
Y1 |
A1 |
y1 |
, |
Y2 |
A2 |
y2 |
, |
(6) |
|
|
|
f |
|
Z |
|
|
f |
|
|
Z1 |
|
|
2 |
|
|
|
|||
де 1 і 2 – матриці напрямних косинусів відповідно для лівого і правого знімків. Обчисленні координати за формулою (6) заносять в таблицю 5.
Трансформовані координати опорних та контурних точок лівого та правого знімків, а також повздовжні паралакси точок тепер вже на горизонтальних знімках, обчислюють за такими формулами:
|
′ |
|
|
|
|
′ |
|
|
′ |
|
|
|
= − |
1 |
, |
|
= − |
1 |
, |
= − |
2 |
, |
|
|
|
|
|
|
|
|
||||||||
1 |
′ |
|
1 |
|
|
′ |
|
2 |
′ |
|
} |
(7) |
|
1 |
|
= |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
− |
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
Значення трансформованих координат та паралаксів заносять в таблицю 6 додатків.
2.3. Обчислення фотограмметричних координат опорних та контурних точок у фотограмметричній системі координат 1 1 1 1.
При виконані цього пункту використовують формули прямої фотограмметричної засічки [1, ст.44], які для трансформованих координат і
паралаксів запишуться так: |
|
|
|
|
|
|
|
||
= |
|
, |
= |
|
, |
= − |
|
}, |
(8) |
|
|
|
|||||||
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де = – базис фотографування.
Обчислені фотограмметричні координати моделі заносять в таблицю 7 додатків.
Фотограмметрична модель отримана в результаті взаємного орієнтування побудована в довільно вибраній системі координат, а її масштаб і положення в просторі відносно зовнішньої (топоцентричної) системи координат місцевостідовільні, і повинні бути визначені в процесі зовнішнього орієнтування.
3. Зовнішнє орієнтування моделі.
Величини, які визначають положення моделі в просторі відносно системи координат місцевості і її масштаб називають елементами зовнішнього орієнтування. Таких елементів сім: , , – координати початку фотограмметричної системи координат 1 1 1 1 в системі координат місцевості; , , – повздовжній, поперечний кути нахилу та кут повороту моделі відносно відповідних площин системи координат місцевості; t – масштабний коефіцієнт [1, ст.105-107].
Використовуючи рівняння (4.59) [1, ст.106] отримують наближені
формули зовнішнього орієнтування. |
|
||
|
= |
+ ( − − ), |
|
Т |
|
|
|
|
= + ( + − ), }, |
(9) |
|
Т |
|
|
|
|
= |
+ ( + + ) |
|
Т |
|
|
|
|
|
7 |
|

Такі рівняння записують для трьох опорних точок: ОП1 ,ОП2 і ОП3 . Невідомими в цих рівняннях є сім елементів зовнішнього орієнтування
фотограмметричної моделі , , |
, , , , . |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
З метою виключення трьох |
невідомих |
, , , переносять початок |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
координат у точку ОП1 . Тобто від рівнянь для точок |
ОП2 і ОП3 |
віднімають |
||||||||||||||||||||
рівняння для точки ОП1 . В результаті отримують: |
|
|
|
|
|
|
|
|
|
|||||||||||||
XT |
X2 1 Y2 1 Z2 1 t; XT |
X3 1 Y3 1 Z3 1 t |
|
|
||||||||||||||||||
Y 2 1 |
X |
Y |
Z |
|
t; Y |
3 |
1 X |
Y |
Z |
|
t |
|
, |
(10) |
||||||||
|
T2 1 |
|
2 1 |
2 1 |
|
2 1 |
|
|
T3 |
1 |
3 1 |
|
3 1 |
|
3 1 |
|
|
|||||
Z |
|
X |
Y Z |
|
t; Z |
|
|
X |
Y Z |
|
t |
|
|
|
||||||||
T2 1 |
2 1 |
|
|
3 1 |
|
|
|
|||||||||||||||
|
|
2 1 |
2 1 |
|
|
|
|
T3 1 |
3 1 |
|
3 1 |
|
|
|
|
|
|
|||||
де прирости топоцентричних та фотограмметричних координат відносно початкової опорної точки:
XT |
XT |
XT |
; Xi 1 Xi X1 |
|
|
||||||||
|
i 1 |
|
i |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
YT |
YT |
YT |
; |
Yi 1 |
Yi |
Y1 |
|
(11) |
|||||
|
i 1 |
|
i |
|
1 |
|
|
|
|
|
|
|
|
Z |
|
Z |
Z |
|
|
Z |
|
Z |
|
Z |
|
||
Ti 1 |
T1 |
|
i 1 |
i |
|
|
|||||||
|
|
Ti |
|
|
|
|
1 |
|
|
||||
В результаті залишиться 4 невідомі: , , ,t .
Значення масштабного коефіцієнта t знаходять за відношенням відстаней між опорними точками у топоцентричній і фотограмметричній системах:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LT2 1 |
|
2 |
2 |
2 |
|
; L2 1 |
2 |
2 |
2 |
|
|||||||
XT2 1 |
YT2 1 |
ZT2 1 |
|
X2 1 |
Y2 1 |
Z2 1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
2 |
Y2 |
Z2 |
|
|
|
X2 |
Y2 |
Z2 |
||||||
L |
; L |
3 1 |
|
||||||||||||||
|
T3 1 |
|
|
|
T3 1 |
T3 1 |
T3 1 |
|
|
|
|
3 1 |
3 1 |
3 1 |
|
||
t 2 1 |
LT |
1 |
|
t 3 1 |
LT |
|
2 |
; |
3 1 |
|
|||
L2 1 |
|
|||||
|
|
|
L3 1 |
|||
Тоді середнє значення масштабного коефіцієнта:
(12)
(13)
|
|
t ср |
|
t 2 1 t3 1 |
|
|
|
|
(14) |
|
|
|
|
|
|
||||
|
|
|
2 |
|
|
|
|
|
|
Після знаходження масштабного коефіцієнта t переходять до |
|||||||||
масштабування моделі: |
|
|
|
|
|
|
|
|
|
|
; |
|
|
Zi 1tср |
(15) |
||||
Xi Xi 1tср |
Yi |
Yi 1tср ; |
Zi |
||||||
тоді рівняння (10), з врахуванням рівнянь (15), приймуть вигляд:
X |
X |
Y Z |
; X |
X |
Y Z |
|||||||||
|
|
T2 |
2 |
2 |
2 |
|
|
|
T3 |
3 |
3 |
3 |
|
|
Y X Y Z ; Y X Y Z |
||||||||||||||
|
||||||||||||||
|
T2 |
2 |
2 |
2 |
|
|
T3 |
3 |
3 |
3 |
||||
Z |
|
X Y Z |
; Z |
T3 |
X Y Z |
|
||||||||
|
T2 |
2 |
2 |
|
2 |
|
3 |
3 |
3 |
|
||||
В рівняннях (16) залишилось три невідомі: , , .
Для знаходження двох з них, і , використовують рівняння координати ZТ . Згідно схеми розташування опорних точок для точкиX 2 0. Тоді:
(16)
для
ОП2
8

|
|
|
|
|
|
ZТ 2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Y2 |
Z2 |
|
|
|
||||||||
звідки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZТ |
|
Z |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
(17) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Y2 |
|
|
|
|
|
|
||
Для точки ОП |
3 |
Y |
Y |
|
, тоді: |
|
|
|
|
|
|
||||||||
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
ZТ |
|
ZТ |
|
X |
|
|
|
|
Z |
|
|||||||
|
|
3 |
2 |
3 Z3 |
|
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
звідки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ZТ ZТ Z3 |
Z2 |
(18) |
|||||||||||||
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X3 |
|
|
|
|
|
|
|||
Знайти значення кута можна, використовуючи одне з рівнянь формул |
|||||||||||||||||||
(11). Наприклад, з рівняння для |
|
X Т |
отримують: |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
XT |
|
|
|
|
|
|
|||||
|
|
|
|
X3 |
Z3 |
|
|
(19) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y
3
Отже послідовність визначення ЕЗО моделі буде така:
1.Знаходять прирости топоцентричних та фотограмметричних координат опорних точок за формулам (11). Отримані дані заносять у таблицю 8.
2.Визначають відстань між опорними точками на місцевості і моделі за формулами (12), визначають значення масштабного коефіцієнту за формулами (13-14) і масштабують прирости фотограмметричних координат за формулами (15). Отримані дані заносять у таблицю 9.
3.Знаходять кути , , за формулами (17-19). Отримані дані заносять у
таблицю 10.
Слід звернути увагу на те, що перенесення початку координат можна здійснювати у будь-яку опорну точку. В залежності від схеми розташування точок для кожного окремого завдання виводять відповідні формули.
4. Визначення координат точок місцевості в топоцентричній системі координат.
Маючи в наявності елементи зовнішнього орієнтування моделі можна знайти розташування на місцевості будь-яких точок моделі, координати яких на місцевості є невідомими. Реалізуємо це на прикладі контурних точок, координати яких на моделі знайдені у п.2.
Першим пунктом алгоритму визначення координат точок місцевості є знаходження приростів у фотограмметричній та топоцентричній системах координат. Прирости знаходять відносно опорної точки, положення якої обрано початком топоцентричної системи координат:
9
|
|
|
|
X j |
X j |
X1 |
|
|
|
|
||||
|
|
|
|
Yj |
|
Yj Y1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
(20) |
||||||
|
|
|
|
Z |
j |
|
Z |
j |
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
X |
Tj |
X |
j |
Y Z |
t; |
|
||||||||
|
|
|
|
|
|
j |
|
j |
|
|
|
|||
Y X Y |
Z t; |
|
(21) |
|||||||||||
|
T |
j |
|
|
j |
|
|
j |
|
j |
|
|
||
|
|
|
X Y Z t; |
|
|
|||||||||
Z |
|
|
j |
|
||||||||||
|
T |
|
|
|
j |
|
|
j |
|
|
j |
|
|
|
Результати обчислень заносять в таблицю 11.
Останнім пунктом алгоритму є визначення топоцентричних координат:
XT |
j |
XT |
j |
XT |
|
|
||
|
|
|
|
1 |
|
|
||
Y |
|
|
Y |
|
|
Y |
|
(22) |
|
|
|
|
|
||||
Tj |
|
Tj |
|
T1 |
|
|||
ZT |
|
|
ZT |
|
|
ZT |
|
|
|
j |
|
|
j |
|
1 |
|
|
|
|
|
|
|
|
|||
Результати обчислень заносять в таблицю 12.
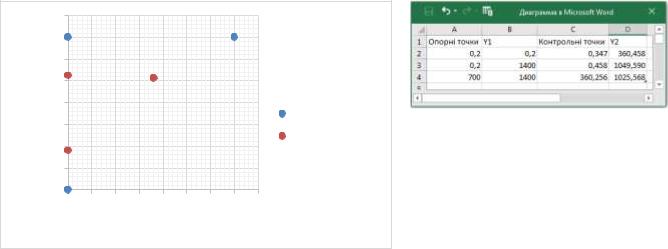
5. Нанесення точок за отриманими координатами.
Використовуючи інструменти програми Word по створенню діаграм, показати на схемі розташування опорних і контрольних точок згідно їх топоцентричних координат.
X 1600 |
ОП2(58) |
|
|
|
|
|
ОП3(358) |
|
1400 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1200 |
20(568) |
|
30(569) |
|
|
|||
|
|
|
|
|||||
1000 |
|
|
|
|
|
|
|
|
800 |
|
|
|
|
|
|
|
Опорні точки |
600 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольні точки |
|
400 |
10(78) |
|
|
|
|
|
||
|
|
|
|
|
|
|||
200 |
|
|
|
|
|
|
|
|
0 |
ОП1(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
100 |
200 |
300 |
400 |
500 |
600 |
700 |
800 |
Y
Рис.1. Приклад схеми і таблиці діаграми розташування опорних і контрольних точок
6. Вимоги та перелік матеріалів до здачі розрахунково-графічної роботи
Результати розрахунково-графічної роботи студенти оформляють у текстовому редакторі Word та електронній таблиці Excel. У ВНС завантажують два файли:
файл Word (звіт) з відповідями на контрольні запитання, описом алгоритму обчислень, таблицями з результатами обчислень (див.додатки) та схемою розташування опорних і контрольних точок.
10