

Конспект до лекції 3
.pdfТема 3. Основні відомості про фотограмметричні мережі
Тематичний план
3.1.Ідея та основні процеси аналітичної фототріангуляції.
3.2.Способи аналітичної фототріангуляції.
3.1. Ідея та основні процеси аналітичної фототріангуляції
Створення топографічних карт чи планів, побудова цифрових моделей місцевості та інші задачі, що розв’язуються фотограмметричними способами, вимагають наявності густої мережі опорних точок для орієнтування кожного аерознімка або стереопари (моделі). Отримання координат опорних точок польовими способами в більшості випадків не виправдовується, бо польові роботи завжди дорожчі від камеральних. Часом територія може бути недоступна для польових робіт або перешкоджатимуть несприятливі погодні умови. Тому ще в 30-х роках минулого століття фотограмметристами був розроблений метод камерального згущення опорної мережі на базі фотограмметричних побудов –
фототріангуляція.
Якщо для фотограмметричних побудов використовують аерознімки, то маємо аерофототріангуляцію. Саме вона отримала найбільше практичне поширення і тому надалі розглядатимемо саме цей спосіб.
Використовуючи внутрішні фотограмметричні зв’язки, які існують між знімками одного або кількох маршрутів, можна побудувати зі стереопар окремі геометричні моделі. На наступному етапі можна з’єднати їх між собою та отримати єдину модель маршруту або кількох маршрутів. На заключному етапі виконується “геодезична” (абсолютна) орієнтація цієї єдиної геометричної моделі у вибраній (абсолютній) системі координат.
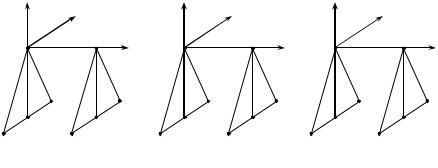
Досить наглядно ідею аерофототріангуляції пояснює рис.3.1.
Рис.3.1. Відтворення геометричної моделі
Виконавши взаємне орієнтування для кожної стереопари, отримаємо геометричну модель, і для цього, як відомо, опорні точки не потрібні. З’єднання сусідніх моделей здійснюється за допомогою зв’язкових точок, що лежать в зоні потрійного перекриття знімків
(рис.3.2).
S1 |
S2 |
|
S |
3 |
S |
4 |
|
|
|||||
P |
P |
P |
|
|
P |
|
1 |
2 |
3 |
|
|
4 |
|
a1 |
a2 b2 |
a3 |
b3 d3 |
b4 |
d4 |
|
|
A |
|
B |
|
D |
|
Рис.3.2. З’єднання моделей за допомогою зв’язкових точок. |
|
|||||

На рис.3.2 показані лише зв’язкові точки в площині аркуша, а насправді маємо їх не лише в центральній частині знімків, але й на краях (рис.3.3).
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
a |
|
a |
2 |
b |
|
a |
3 |
|
b |
d |
3 |
|
b |
1 |
|
|
2 |
|
|
|
3 |
|
|
4 |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.3.3. Центральні |
і бокові |
|
зв’язкові точки. |
||||||||||
|
|||||||||||||
|
|
|
|
d |
4 |
|
|
На цій стадії опорні геодезичні точки теж не потрібні. Сформована загальна модель (на рис.3.2 – для маршруту) мусить бути орієнтована в геодезичній системі координат. По суті ця задача є аналогічною до геодезичного орієнтування моделі, описаного в розділі 4.6. Ось тут уже опорні точки потрібні, але не чотири точки на кожну стереопару, а чотири точки на весь маршрут, а в ньому може бути 10-20 стереопар або більше. Одна із стандартних вживаних схем розташування опорних точок в маршруті аерознімків показана на рис.3.4.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- опорна точка |
|
-центр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Рис.3.4. Схема розташування опорних точок
Зауважимо, що на рис.3.4 показано шість опорних точок, а не чотири. Це викликано тим, що при побудові мережі аерофототріангуляції відбувається нагромадження похибок в просторових координатах визначуваних точок, а для часткового погашення цього негативного явища беруть більше ніж чотири опорні точки. Про це йтиме мова в розділі 3.3.
Класифікацію способів фототріангуляції можна здійснити за кількома ознаками. Однією з них є реалізація з використанням тих чи інших технічних засобів. Якщо застосовують аналогові стереофотограмметричні прилади, то маємо фототріангуляяцію аналогову. Якщо вимірювання проводять на стереокомпараторах чи автографах аналітичних, а обчислення на комп’ютерах, то маємо фототріангуляцію аналітичну. Якщо використані цифрові фотограмметричні станції, то маємо фототріангуляцію цифрову.
Аналогова фототріангуляція в наші дні не використовується, натомість широке застосування мають аналітична та цифрова фототріангуляція, хоча саме тепер цифрові методи потужно витісняють аналітичну фототріангуляцію. Так як теоретичною основою цифрової фототріангуляції є аналітична фотограмметрія (і, звісно, аналітичної фототріангуляції), то в цьому розділі ми коротко розглянемо основні математичні положення фототріангуляції.
Тепер звернемось до класифікації способів аналітичної фототріангуляції, поданих в таблиці; тут спочатку подається класифікаційна оцінка, потім елемент ознаки і як результат – тип і назва відповідного способу фототріангуляції (таблиця 3.1).
Таблиця 3.1. Основні види фототріангуляції
№з/п |
Класифікаційна ознака |
Елемент ознаки |
Типи фототріангуляції (Ф.) |
1 |
2 |
3 |
4 |
1 |
Призначення |
Топографія |
Топографічна Ф. |
|
|
Інженерна справа |
Нетопографічна Ф. |
2 |
Вид знімання |
Космічний знімок |
Космічна Ф. |
|
|
Аерознімок |
Аерофототріангуляція |
|
|
Фототеодолітний знімок |
Наземна Ф. |
3 |
Визначувані |
координати |
Просторові координати X, Y, Z |
Просторова |
|
|
об'єкта |
|
Планові координати X, Y |
Планова |
|
|
|
|
Висота Z |
|
Висотна |
4 |
Кількість |
маршрутів |
Один |
|
Маршрутна Ф. |
|
фотознімання об'єкта |
Більше ніж один |
Багатомаршрутна (блочна) Ф |
||
5 |
Відтворення |
моделей |
В'язка |
|
Ф. за методом в'язок |
|
об'єкту (геометрична суть) |
Модель |
|
Ф. за методом моделей |
|
6 |
Використання |
опорних |
|
|
Ф. з використанням даних |
|
(додаткових) даних |
GPS |
|
GPS |
|
7 |
Визначення |
параметрів |
Параметри калібрування |
Ф. із самокалібруванням |
|
|
калібрування знімків |
|
|
Ф. без самокалібрування |
|
8 |
Застосування |
|
Стереокомпаратор, стекометр, |
Аналітична Ф. |
|
|
вимірювальних засобів |
стереоанаграф |
|
|
|
|
|
|
Цифрова |
фотограмметрична |
Цифрова Ф. |
|
|
|
станція |
|
|
|
Дамо деякі пояснення до вказаних способів. |
|
|||
|
За першою ознакою – |
топографічна |
фототріангуляція |
набула такого широкого |
|
застосування, що створення карт чи планів немислимо без побудови мережі фототріангуляції. Саме тут є найбільша економія коштів та часу за рахунок суттєвого скорочення польових робіт.
За другою ознакою – як космічна, так і аерофототріангуляція займають вагоме місце в технологіях створення картографічних матеріалів. Особливу роль відіграє аерофототріангуляційна опорна мережа для побудови цифрових моделей рельєфу, без якої неможливо отримати цифрові ортофотоплани і карти.
За третьою ознакою – головним способом тепер є просторова фототріангуляція з
визначенням всіх трьох координат |
X ,Y , Z |
для точок мережі. Планова та висотна |
фототріангуляція практично не застосовується.
За четвертою ознакою – машрутна фототріангуляція є частковим випадком багатомаршрутної фототріангуляції і застосовується не так часто. В реальних умовах опрацьовують знімки, що покривають деяку площу, тому багатомаршрутна фототріангуляція має ширше застосування. Правда, в деяких технологіях прийнято такий підхід: спочатку будують мережі фототріангуляції в межах кожного маршруту, і на цьому етапі виявляють різноманітні помилки і промахи, а потім будують багатомашрутну (блочну) фототріангуляційну мережу. Способи побудови – це суть наступної ознаки.
За п’ятою ознакою – йдеться про математичну модель побудови мережі фототріангуляції. Тут існують два різні підходи. Перший з них використовує умову колінеарності: для всіх точок усіх знімків повинна одночасно виконуватись ця умова (2.12). Цей метод називається методом в’язок.
Інший підхід базується на поетапному розв’язанні задачі, і один з варіантів є такий: побудова геометричної моделі в межах стереопари (взаємне орієнтування), пряма фотограмметрична засічка, з’єднання сусідніх моделей в єдину вільну фотограмметричну мережу за допомогою зв’язкових точок, що лежать в потрійному перекритті знімків; з’єднання маршрутних моделей в єдину блочну модель за допомогою точок, що лежать в міжмаршрутному перекритті. На кінцевому етапі відбувається зовнішнє (геодезичне) орієнтування блочної моделі фототріангуляції та усунення її деформації, спричинене різними помилками, зокрема тих, що супроводжують вимірювальний процес.Цей метод отримав назву
– метод моделей.
За шостою ознакою – Відомо, що сучасні GPSметоди дозволяють під час польоту носія апаратури визначати просторові координати центрів проекцій. Це суттєво впливає на сам процес фототріангуляційних побудов, і зокрема, на його точність, яка значно зростає.
Але ще суттєвішим є те, що коли знаємо просторові координати центрів проекцій всіх знімків і будуємо блочну мережу, то опорні точки взагалі не потрібні. Це встановлено нашими дослідженнями, описаними в навчальному посібнику. Зрозуміла конкретна вигода для практики від такої технології – не треба виконувати польові роботи для визначення геодезичних координат опорних точок (т.зв. прив’язка знімків). Це дуже вигідно, коли місцевість недоступна або важкопрохідна для топографів чи геодезистів.
За сьомою ознакою – знімок сам по собі є джерелом похибок (див.розділ 3), тому треба шукати шляхи знешкодження цього негативного впливу. Один з таких підходів полягає в тому, що похибки знімків подаються у вигляді певної математичної моделі. Наприклад: похибки
x, y |
описуються степеневим поліномом: |
||||
|
x = a |
o |
+ a x + a |
2 |
y + a xy |
|
|
1 |
3 |
||
|
y = bo + b1x + b2 y + b3 xy , |
||||
де ai , bi |
- невідомі параметри (параметри калібрування), |
||||
|
x, y - виміряні координати точки на знімку. |
||||
Приведені вище рівняння долучають до рівнянь колінеарності, і одночасно визначають і просторові координати точок фототріангуляції, і параметри калібрування. При побудові мереж фототріангуляції використовуються внутрішні фотограмметричні зв’язки, що існують як для точок, що лежать в потрійному перекритті, так і для точок, що знаходяться в міжмаршрутному перекритті. В цьому випадку маємо метод фототріангуляції із самокалібруванням.
Якщо додаткові рівняння не включаються в математичну модель фототріангуляції, то маємо фототріангуляцію без самокалібрування.
Про класифікацію за восьмою ознакою кілька слів вже було сказано на початку цього розділу. Зауважимо, що в останні роки вагому роль відіграє цифрова фототріангуляція, зокрема технологія автоматичної побудови мереж, коли вимірювання знімків проводить не оператор–фотограмметрист, а сам комп’ютер, тобто пошук та ідентифікація точок стереопари реалізується програмним шляхом з використанням теоретичних засад кореляції оптичних щільностей елементарних образів.
3.2. Способи аналітичної фототріангуляції 3.2.1. Фототріангуляція методом в’язок
Нехай ділянка місцевості покрита кількома аерознімальними маршрутами, причому поздовжнє перекриття знімків складає 60%, а поперечне не менше 20%. На ділянці виконана планово-висотна прив’язка, кількість опорних точок – не менше трьох; опорні точки, як правило, розташовують по периметру ділянки. Сукупність знімків утворює блок, в межах якого необхідно провести згущення опорної мережі, тобто визначити просторові координати деякої кількості точок.
Для кожної точки об’єкта, що зобразилась на знімку, можна записати рівняння колінеарності. Вважаючи, що елементи внутрішнього орієнтування відомі, а невідомими є елементи зовнішнього орієнтування та координати точок мережі, виконаємо лінеаризацію рівнянь колінеарності. Отримаємо рівняння поправок:
ax X s + bx Ys + cx Zs + d x a + ex + f x k + g x X + hx Y + kx Z + lx = x ,
a y X s + by Ys + cy Zs + d y a + ey + f y k + g y X + hy Y + k y Z + l y = y , |
(3.1) |

тут коефіцієнти ax,bx,……fy обчислюють так:
a |
|
|
= |
1 |
|
(a |
f |
||
x |
|
|
|||||||
|
|
|
R |
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
b |
|
= |
1 |
(b |
f |
||||
x |
|
|
|||||||
|
|
|
|
R |
|
1 |
|
||
|
|
|
|
|
|
|
|
||
|
c |
|
= |
1 |
(c |
||||
|
x |
|
|
||||||
|
|
|
|
|
R |
|
1 |
||
|
|
|
|
|
|
|
|
||
+ a3 x),
+ b3 x), |
||
f |
+ c |
x) |
|
3 |
|
,
a y
b |
y |
|
|
c |
|
=R1 (a2 f
=1 (b2 f R
y= 1 (c2
R
+ a3 y),
+ b3 y), f + c3 y),
|
|
d |
|
= |
f |
c (X − X |
|
)− a |
|
(Z − Z |
|
) + |
x |
c |
|
(X − X |
|
|
)− a |
|
(Z − Z |
|
) , |
||||
|
|
x |
|
S |
|
S |
|
3 |
S |
|
3 |
S |
|||||||||||||||
|
|
|
|
R |
|
1 |
|
1 |
|
|
R |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y −Y |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
ex |
= − f |
sin k + x tg + |
|
S |
|
, |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R cos |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
f x = y |
, |
f y |
= −x |
, |
|
|
|
|
|
|
|
|
|||
|
|
d y |
= |
f |
c2 (X − X S )− a2 (Z − Z S ) + |
y |
c3 (X − X S )− a3 (Z − Z S ) , |
||||||||||||||||||||
|
|
R |
R |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y −Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ey |
= − f |
cos k + y tg + |
|
S |
|
|
|
, |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
R cos |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
R = a3 (X − X S )+ b3 (Y −YS )+ c3 (Z − ZS ), |
|
|
|
|
|||||||||||||||
|
|
gx = −ax; hx = −bx ; |
k x = −cx ; |
|
gy = −ay ; |
hy |
= −by ; |
k y |
= −c y |
|
(3.2) |
||||||||||||||||
Вільні члени такі: lx = |
x |
- x , ly = |
y - |
y , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.3) |
||||||||
де x, y - виміряні координати точки знімка, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
x , |
y |
- обчислені координати цієї ж точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Розв’язання задачі виконується методом послідовних наближень; ітераційний процес вважається закінченим при виконанні умов, аналогічних до (4.40), але розширених на всі визначувані невідомі.
Для всієї сукупності виміряних точок та всіх знімків розмір системи нормальних рівнянь становить
N = 6n + 3k , |
(3.4) |
де n - число знімків, що входять в блок; k - число точок об’єкта, координати яких |
|
визначаємо. |
|
Якщо n=100, k=1000, то N=3600. Матриця нормальних рівнянь |
включає |
3600х3600=1290000 чисел, або ≈13.106. Для розв’язання задачі необхідно, щоб кожне число представлялось 32 бітами; тому загальний об’єм пам’яті складає 32∙13∙106 біт = 4∙108 біт, тобто біля 1 гігабайту. Це досить великий об’єм “комп’ютерної” пам’яті, і ще десять років тому пряме розв’язання такої системи нормальних рівнянь було досить проблематичним. На нинішньому етапі розвитку обчислювальної техніки це не є перешкодою.
3.2.2. Фототріангуляція методом моделей
В цьому методі спочатку за результатами вимірів пари знімків будують окремі моделі для частини об’єкта в незалежних просторових фотограмметричних системах координат
S1X1Y1Z1, S2X2Y2Z2 , і т.д. (рис.3.5).
Z1
Y1
Z2
Y2
Z3
Y3
S |
S |
2 |
S |
2 |
S |
3 |
S |
3 |
S |
4 |
1 |
|
|
|
|
|
|||||
|
|
|
X1 |
|
|
|
X2 |
|
|
X3 |
3 |
6 |
6 |
9 |
9 |
1 |
2 |
5 |
5 |
8 |
8 |
1 |
1 |
4 |
4 |
7 |
7 |
1 |
Рис.3.5. Окремі фотограмметричні моделі зі спільними зв’язковими |
|||||
В кожній моделі, як правило, початок системи координат суміщають з лівим центром проекції, а вісь Х спрямовують вздовж базису проектування. Найбільш поширеним способом побудови моделі є знаходження елементів взаємного орієнтування для кожної стереопари та наступне обчислення просторових фотограмметричних координат з прямої фотограмметричної засічки.
Подальшим кроком є з’єднання моделей в єдину систему координат та приведення їх до єдиного масштабу. Очевидним є те, що координати точок S2, 4, 5, 6 в моделях 1,2 повинні
співпадати. Такий же зв’язок є між моделями 2, 3 і т.д. Отже, вихідними є умови |
|
Xj – Xj+1 = 0, |
|
Yj - Yj+1 = 0, |
(3.5) |
Zj – Zj+1 = 0.
З математичної точки зору це процес “геодезичного” орієнтування системи (j+1)-ї моделі стосовно системи координат j-ї моделі. Відмінність полягає в тому, що перенесення початку системи координат (j+1) -ї моделі відбувається фіксовано. Наприклад, для 2-ї моделі маємо
X 0 = X S |
2 |
; |
Y0 |
= YS |
2 |
; |
Z0 = Z S |
2 |
, |
(3.6) |
|
|
|
|
|
|
|
|
де |
X S |
2 |
, YS |
2 |
, Z S |
2 |
- координати центра S2 в 1-ій моделі. |
|
|
|
|
|
Тому рівняння (2.35) включають чотири невідомі і мають вигляд :
d |
x |
a + e |
|
+ f |
x |
k + g |
x |
t + l |
x |
= |
x |
, |
|||||||
|
|
|
x |
|
|
|
|
|
|
|
|
||||||||
d |
y |
a + e |
y |
+ f |
y |
k + g |
y |
t + l |
y |
= |
y |
, |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
d z a + ez + f z k + g z t + lz = z .
(3.7)
Одна зв’язкова точка дає три рівняння. Якщо число рівнянь (3.7) перевищує число невідомих, то застосовують МНК. Цей підхід має певний недолік: якщо точки 4,5,6
розташовані на одній прямій, то елемент |
a |
визначається погано (нестійко). Тому |
запропоновані дещо інші алгоритми, наприклад, трикутник S246 з моделі 1 повинен співпадати з аналогічним трикутником з моделі 2. Жорсткість такого сполучення дещо краща.
Об’єднані між собою моделі творять загальну маршрутну або блочну модель.
3.2.3. Фототріангуляція при відомих координатах центрів проекцій.
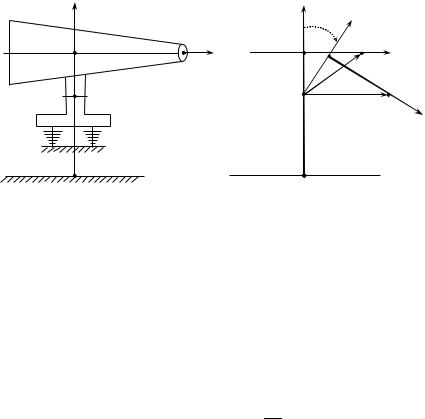
В практиці фототріангуляційних робіт зустрічаються два випадки, коли координати центрів проекцій відомі.
Перший випадок відноситься до фототеодолітного знімання, в якому координати центрів фотографування відомі з геодезичних робіт. Строго кажучи, тоді відомі координати фотостанції, координати центра проекції можуть бути визначені при відомих кутових елементах зовнішнього орієнтування та висоті інструмента (рис.3.6).
Z
Q
C 
Qo
r
S
Y
Z |
|
|
|
Q |
|
Q |
|
C |
|
Qo
r
r
Z S
Y
Y
Рис.3.6. Зміна координат центра проекції при нахилі фототеодоліта.
Q0 - центр фотостанції,
C- центр обертання фототеодоліта,
Q- перетин вертикальної осі з головною оптичною віссю фотокамери при =0,- кут нахилу фотокамери,
r - постійна фотокамери.
Якщо елементи зовнішнього орієнтування (кутові та лінійні) точно відомі, то обчислення геодезичних координат точки об’єкта проводиться за формулами прямої фотограмметричної засічки:
X |
Г |
|
|
X |
Г |
|
|
b |
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
YГ |
= |
YГ |
+ r |
a2 |
+ |
|
t |
xt |
|
, |
|
|
|
|
|
(3.8) |
|||||||||||
|
|
|
|
|
|
p |
|
л |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
t |
z |
|
|
|
|
|
|
|
|
|
||||||||
Z |
|
|
|
Z |
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Г |
|
Г |
|
2 |
|
|
tл |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
Q |
л |
|
|
л |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тут Qл–ліва фотостанція, л – індекс, що означає лівий знімок, a2,,b2 , c2 – напрямні |
|||||||||||||||||||||||||||
косинуси, Bt – базис фотографування, приведений до горизонтального положення, xt |
л |
, zt |
л |
, pt - |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
трансформовані координати і поздовжній паралакс виміряної точки. |
|
|
|
|
|
|
|
||||||||||||||||||||
Кутовими елементами зовнішнього орієнтування є: кут |
- утворений віссю ХГ і |
||||||||||||||||||||||||||
проекцією головної оптичної осі фотокамери на горизонтальну площину, |
|
- кут нахилу |
|||||||||||||||||||||||||
фотокамери, к- кут розвороту знімка в своїй площині, причому |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
= A + − 90 |
˚, |
|
|
|
|
|
|
|
|
|
|
(3.9) |
||||||
Тут А – дирекційний кут базису фотографування, φ- кут скосу .
При побудові фототріангуляційної мережі способом в’язок для кожної виміряної точки складають два рівняння поправок
a |
X |
Q |
+ b |
Y |
+ c |
Z |
Q |
+ d |
x |
+ e |
+ f |
x |
k − a |
X − b |
Y − c |
Z + l |
x |
= |
x |
, |
|
x |
|
x |
Q |
x |
|
|
x |
|
x |
x |
x |
|
|
|
|
||||||
az X Q + bz YQ + cz ZQ + d z + ez + f z k − az X − bz Y − cz Z + lz = z , |
(3.10) |
||||||||||||||||||||
тут ax…….fz - частинні похідні, отримані з диференціювання видозмінених рівнянь колінеарності.
Подальше розв’язання полягає у застосуванні МНК, тобто у переході від рівнянь поправок до нормальних рівнянь. Організація обчислювального процесу є аналогічною до тої, що використовується при способі в’язок в аерофототріангуляції.
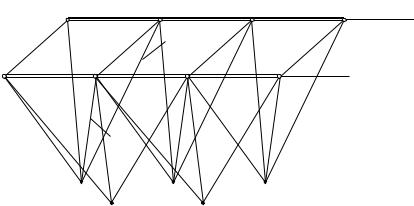
Другий випадок стосується аерофототріагуляції з використанням даних глобальних позиційних систем (GPS). Ці системи дозволяють фіксувати місцеположення літака чи гелікоптера з точністю від кількох сантиметрів до десятків сантиметрів. Така точність відповідає в багатьох випадках вимогам до топографічних та інженерних завдань. Опускаючи деякі деталі, формалізуємо задачу так: для кожного центра фотографування лінійні елементи XS, YS, ZS зовнішнього орієнтування відомі. Необхідно побудувати мережу блочної фототріангуляції. В цьому випадку рівняння поправок (3.1) приймуть вигляд:
S |
S |
S |
S |
10 |
11 |
12 |
13 |
S1
|
R101 |
|
R103 |
|
|
||
|
S |
2 |
|
S |
3 |
S |
4 |
|
|
|
|
|
|||
R1 |
|
|
R4 |
|
|
|
|
R |
|
R |
|
|
|
|
|
|
102 |
|
|
|
|
||
100 |
|
|
|
|
|
|
|
|
|
R |
R3 |
|
R |
R |
|
|
|
2 |
|
5 |
6 |
|
|
A |
A |
A |
100 |
101 |
102 |
A1 |
A2 |
Рис.3.7. Блочна мережа з двох аерофотознімальних маршрутів з точками зв’язковими для стереопар та маршрутів.
d |
x |
+ e |
+ f |
x |
k + g |
x |
X + h |
Y + k |
x |
Z + l |
x |
= |
x |
, |
|
|
x |
|
|
x |
|
|
|
|
|
||||||
d y + ey + f y k + g y X + hy Y + k y Z + l y = y . |
(3.11) |
||||||||||||||
Як відомо, при побудові фототріангуляції способом в’язок необхідно мати точки, розташовані по периметру блока. Тоді для опорних точок в рівняннях (3.1) δX=δY=δZ=0, тобто поправки для них не визначаються, а при застосуванні МНК задача з побудови мережі має розв’язок.
При відомих лінійних елементах зовнішнього орієнтування опорні точки взагалі не потрібні. Цей на перший погляд парадоксальний висновок, як згадувалось раніше, отримав наше теоретичне та експериментальне підтвердження. Для повного розв’язання цієї задачі використовуються фотограмметричні зв’язки між знімками, що належать одному маршруту (в першу чергу зв’язкові точки) та між знімками сусідніх маршрутів (для точок, що лежать в міжмаршрутному перекритті). Геометрична суть задачі витікає з рис. 3.7. На рис.3.7 маємо :
S1, S2, S3 …- центри фотографування i- го маршруту,
S10, S11, S12 …- центри фотографування i+1- го маршруту, A1, A2,…- точки, що зобразились на i- му маршруті,
A100 , A101 ,…- точки, спільні для i-го та i+1-го маршрутів.
Нахили знімків приводять до зміни векторів R1 та R2 , R100 та R101. Це нагадує гойдалку: знімки з центрами S1 та S10 нахиляються доти, доки вектори R1 та R2 не перетнуться в точці A1. Одночасно знімки з центрами S1 та S10 нахиляються доти, доки вектори R100 та R101 не перетнуться в точці A100 . Вищеописаний спосіб, що базується на рівняннях (3.11), апробований на макетних знімках (дослідження виконав І.Колб, “Львівська політехніка”). Доказана правильність ідеї та досліджена точність способу при різноманітних параметрах змодельованого аерофотознімання.
Запропонований спосіб дозволяє зробити суттєві висновки, які раніше в літературі не зустрічались.
1.Оскільки цей спосіб реалізується виключно в методі аналітичної аерофототріангуляції за строгими формулами, які не накладають жодних обмежень на кути нахилу знімків, то відпадає потреба в гіростабілізуючих установках. Це здешевить вартість знімальної апаратури.
2.Блочна мережа будується без жодної опорної точки. Це стає особливо цінним при картографуванні недоступних територій, на яких неможливо або дуже важко проводити польові геодезичні роботи з визначення координат опорних точок.
Для високоточного фіксування координат центрів проекцій в польоті доцільно використовувати диференційний режим роботи GPS, коли в районі робіт функціонує базова GPS-станція. Така схема дозволяє уникнути невизначеності GPS-визначень та підвищити
точність фіксації просторових координат центрів проекцій.
3.2.4.Маршрутна фототріангуляція
Для побудови фототріагуляційної мережі за знімками одного маршруту розроблено три способи: частково-залежних, повністю залежних та незалежних моделей. В способі частковозалежних моделей кожна наступна модель, побудована з пари знімків, що перекриваються, має незалежний масштаб, але спільну кутову орієнтацію з попередньою моделлю. В способі повністю залежних моделей і масштаб, і кутова орієнтація залежать від попередньої моделі. В способі незалежних моделей кожна модель будується в своїй системі координат та в незалежному масштабі. З теоретичних позицій всі три способи є рівнозначними, а різниця полягає лише в різному математичному розв’язанні задачі.
Розглянемо кожний спосіб.
СПОСІБ ЧАСТКОВО ЗАЛЕЖНИХ МОДЕЛЕЙ.
За виміряними координатами і паралаксами точок знімків спочатку обчислюють елементи взаємного орієнтування кожної стереопари. Для першого знімка маршруту задаються довільною просторовою системою координат та довільними елементами
зовнішнього орієнтування. Як правило, |
X S |
= YS |
= ZS |
=α1=ω1=k1=0. |
Кутові елементи |
|
1 |
1 |
1 |
|
|
орієнтування для другого знімка вираховують за строгими формулами |
|
||||
An=Aл∙A(Δα,Δω,Δk) i−i+1 , |
|
(3.12) |
|||
де A – матриця напрямних косинусів, τ, ν, Δα, Δω, Δk – елементи взаємного орієнтування в лінійно-кутовій системі.
Базисні компоненти вираховують так:
B |
x |
|
|
|
|
|
B |
||
B |
|
|
|
|
|
|
|
, |
|
|
= T T A |
л |
( , , o) |
T |
0 |
||||
|
y |
3 |
i−i+1 |
3 |
|
|
|
||
B |
|
|
|
|
|
|
|
0 |
|
|
z |
|
|
|
|
|
|
|
|
де B - базис в першій стереопарі (довільна величина).
|
|
0 |
1 |
0 |
|||
T |
= |
|
0 |
0 |
1 |
|
|
|
|
||||||
3 |
|
|
|
|
|||
|
|
−1 |
0 |
0 |
|||
|
|
|
|
|
|
|
|
(3.13)
(3.14)
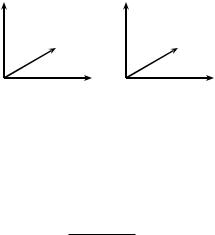
Матриця T3 здійснює перехід від фотограмметричної до базисної системи координат
(рис.3.8).
Y |
|
|
Z |
Б |
|
|
|
X |
Б |
|
Y |
|
|
||
|
|
|
|
|
− Z |
Б |
X |
|
|
|
Рис.3.8. Базисна та фотограмметрична
системи координат.
В результаті таких дій кожна модель матиме спільну орієнтацію з першою моделлю, але довільний масштаб.
Передачу масштабу виконують за зв’язковими точками. Масштабний коефіцієнт вираховують так:
|
|
|
|
Z |
j |
− B |
Z |
K |
|
= K |
|
|
|
|
j |
j+i |
j |
Z |
|
||||
|
|
|
|||||
|
|
|
|
|
|||
|
|
|
|
|
|
j+1 |
|
,
(3.15)
тут j- номер моделі, Z – апліката зв’язкової точки, BZ – базисний компонент (перевищення правого центра проекції над лівим).
Отримані дані дозволяють побудувати вільну фотограмметричну маршрутну модель за формулами прямої фотограмметричної засічки :
X |
||
|
Y |
|
|
||
|
||
Z |
||
|
|
|
X |
||
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
||
|
|
|
|
|
Ф |
|
|
|
|
|
|
= Nx |
|
||
|
|
t |
|
|
|
|
л |
X Y Z
,
|
|
|
|
|
|
|
|
|
S |
|
лj |
Y |
|
+K
=Ny
j
tл
X |
|||
|
Y |
|
|
|
|
||
|
|||
|
Z |
|
|
|
|
|
|
, Z
,
j = −Nf
,
(3.16)
(3.17)
N – масштабний множник.
Заключним етапом є виключення деформації фототріангуляційної мережі, найчастіше з використанням степеневих поліномів.
СПОСІБ ПОВНІСТЮ ЗАЛЕЖНИХ МОДЕЛЕЙ.
Лівий знімок кожної стереопари спочатку трансформують за відомими кутовими елементами зовнішнього орієнтування цього знімка. Для першої стереопари приймають αл = ωл = кл =0. На наступному етапі розв’язують задачу взаємного орієнтування в лінійно-кутовій системі та визначають поправки до базису так, як описано в розділі 4.3. В результаті цієї операції правий знімок та базис проектування отримують кутову орієнтацію попередньої стереопари. Одночасно масштаб наступної моделі приведений до масштабу попередньої.
Обчислення просторових координат точки моделі виконується за формулами (3.16), але приймаючи Кj =1 для всіх точок моделей. Геодезичне орієнтування маршрутної моделі та виключення деформації маршрутної мережі здійснюється так само, як і в попередньому способі.
СПОСІБ НЕЗАЛЕЖНИХ МОДЕЛЕЙ.
Для кожної стереопари розв’язують задачу взаємного орієнтування в базисній або лінійно-кутовій системі. Приймаючи базис проектування довільним, знаходять просторові координати точки моделі, розв’язуючи пряму фотограмметричну засічку. Отже, кожна модель побудована у своїй системі координат та у своєму, довільному, масштабі. Приєднання j+1-ї моделі до j-ї виконується за методикою, описаною в розділі 3.2.2. Геодезичне орієнтування та усунення деформації маршрутної мережі виконується так само, як і в попередніх способах.
Способи маршрутної фототріангуляції набули широкого поширення в 60-80 –х роках, коли обчислювальні машини мали обмежені можливості. Зараз при потужних комп’ютерах вони витіснені програмами блочної фототріангуляції, і маршрутна мережа розглядається як окремий випадок блочної мережі.
3.2.3. Фототріангуляція із самокалібруванням
Під терміном “самокалібрування” (або “автокалібрування”) розуміють процес визначення елементів внутрішнього орієнтування знімка та параметрів деформації зображення, зумовленої різними чинниками (наприклад, симетричною та асиметричною дисторсією об’єктива, афінною деформацією зображення).
Метод самокалібрування вимагає, щоб об’єкт зобразився не менше, аніж на трьох знімках. Цей метод вперше запропонував D.C.Brown (США) та застосував його для фотограмметричного опрацювання знімків Місяця в умовах повної відсутності опорних точок на об’єкті. Були використані дані про орбіту, елементи внутрішнього орієнтування та кути нахилу камери.
Існує кілька способів фототріангуляції із самокалібруванням; відмінність полягає у прийнятій апріорі математичній моделі. Назвемо їх:
-використання умови колінеарності для всіх точок фототріангуляції;
-сумісне використання умов колінеарності та компланарності для всіх точок фототріангуляції;
-апріорі прийняте положення, що елементи внутрішнього орієнтування (ЕВО) відомі;