

Конспект лекцій 5 (Технології цифрової фотограмметрії)
.pdfРис.10.
Значення координат кута створюваної матриці вибирають кратними величині елементів матриці.
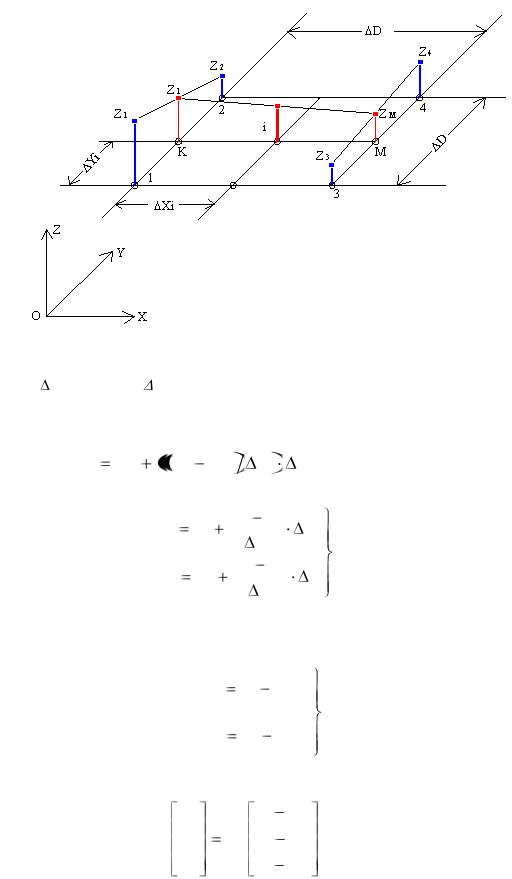
Для формування цифрового ортофотознімка, кожному елементу цифрового зображення a ij необхідно присвоїти оптичну щільність зображення відповідної ділянки місцевості на вхідному цифровому знімку. Для виконання цієї операції за значеннями індексів i та j елементів матриці a ij визначаються координати X, Y центра відповідного піксела цифрового ортофотознімка в геодезичній системі координат. За координатами Xi, Yi точки місцевості, відповідної центру піксела, по цифровій моделі рельефу визначається геодезична висота цієї точки Zi. Визначення координати Zi виконується методом білінійної інтерполяції (рис.11).
|
|
Рис.11. |
|
|
|
|
|||
На рис.2: X = Xi - X1, а |
Y= Yi - Y1, де X1 та Y1 - координати вузла 1 цифрової моделі |
||||||||
рельєфу. |
|
|
|
|
|
|
|
|
|
Висота точки Zi обчислюється за формулою: |
|
|
|
|
|||||
Zi ZK |
ZM |
ZK |
D |
|
|
X i , |
(1.21) |
||
в якій: |
|
|
|
|
|
|
|
|
|
|
Z K |
Z1 |
Z 2 |
Z1 |
Yi |
|
|||
|
|
|
D |
|
|
. |
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
Z 4 |
Z |
|
|
|
|
|
Z M |
Z3 |
3 |
Yi |
|
||||
|
|
D |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
За координатами Xi,Yi,Zi та значенням елементів внутрішнього і зовнішнього орієнтування знімка розраховуються координати х,у відповідної точки на вихідному цифровому знімку в системі координат знімка Sхуz. Розрахунки виконуються за формулами:
x |
x0 |
f |
x * |
|
|
|||
|
z * |
|
, |
(1.22) |
||||
|
|
|
|
|||||
|
|
|
|
y * |
||||
y |
y0 |
f |
|
|
|
|||
|
z * |
|
|
|
||||
|
|
|
|
|
|
|||
в яких |
|
|
|
|
|
|
|
|
x * |
X |
|
X S |
|
|
|||
y * |
AT Y |
|
YS . |
|
|
|||
z * |
Z |
|
Z S |
|
|
|||
За координатами х,у та значеннями параметрів внутрішнього орієнтування цифрового зображення визначають координати точки знімка в системі координат цифрового зображення
осхсус.
У випадку використання афінних перетворень при виконанні внутрішнього орієнтування, визначення координат виконується за формулами:
xc |
P |
1 x |
a0 |
A1 |
A2 |
x |
a0 |
yc |
|
y |
b0 |
B1 |
B2 |
y |
b0 |
Далі за координатами хС та уС розраховують піксельні координати точки
xp xc
.
yp  yc
yc
За значеннями піксельних координат xp,yp точки цифрового зображення знімка, які є проекцією центра піксела матриці цифрового ортознімка, знаходять найближчі до цієї точки чотири пікселі цифрового зображення знімка і методом білінійної інтерполяції, за формулами (1.7) визначають значення оптичної щільності Di чи кольору, що присвоюється відповідному пікселу матриці цифрового ортофотознімка. При цьому значення величин хp, yp визначають за формулами:
x p x pi x pk
.
yp ypi ypk
Таким же чином визначаються оптичні щільності і колір всіх решти пікселів цифрового ортофотознімка.
Окрім методу білінійної інтерполяції для формування цифрового ортофотознімка застосовують метод “найближчого сусіда”, в якому за піксельними координатами xp,yp знаходять піксел цифрового зображення знімка,
на який проектується точка, відповідна центру піксела цифрового ортофотознімка, і значення його оптичної щільності чи кольору присвоюється
пікселу цифрового ортофотознімка.
Метод “найближчого сусіда” дозволяє зменшити час формування цифрового ортофотознімка у порівнянні з методом білінійної інтерполяції,
однак зображувальні властивості створюваного цифрового ортофотознімка при цьому дещо погіршуються.
Створення цифрових фотопланів
Цифрові фотоплани створюють за цифровими транс-формованими знімками, що перекриваються.
На рис.3 представлено принцип формування цифрового фотоплану з цифрових трансформованих знімків.
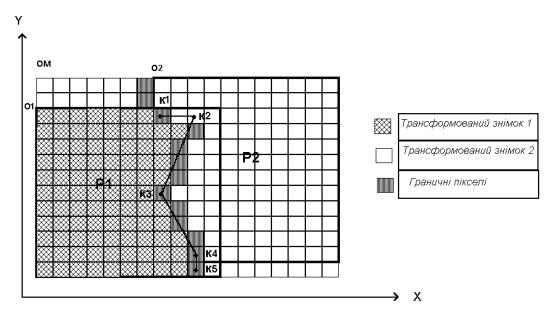 Рис.12.
Рис.12.
Для створення фотоплану використовуються цифрові трансформовані знімки з одинаковим розміром пікселів та маючі координати початків систем координат цифрових зображень O1 та O2, кратні розміру піксела.
При створенні цифрового фотоплану в зоні перекриття трансформованих знімків проводять лінію порізу у виді полілінії з вузлами Ki. Далі, с допомогою лінії порізу визначають в кожному рядку граничні піксели, суміщені з лінією
порізу, і приступають до формування матриці цифрового фотоплану.
Координати початку системи координат цифрового фотоплану XOM
приймаються рівними найменшому значенню координат XO1 та XO2 початків систем координат цифрових трансформованих знімків, а YOM – найбільшому значенню координат YO1 та YO2.
Формування цифрового фотоплану виконується наступним чином. Кожен рядок матриці фотоплану формується з рядка трансформованого знімка P1,
включаючи граничний піксел та рядка знімка P2, починаючи з піксела,наступного за граничним.
Описаним вище методом можна приєднати до створеного фотоплану інші знімки, які з ним перекриваються.
Цифрові фотоплани можуть бути створені шляхом формування матриці цифрового фотоплану безпосередньо за всіма цифровими знімками, що перекриваються. Процес формування цифрового фотоплану цим методом ілюструється на рис.13.
На зображеннях знімків проводять лінії порізу, які являють собою полілінії. За координатами вузлів полілінії в системі координат цифрового знімка визначають координати проекцій вузлів полілінії на цифровому фотоплані в системі координат об’єкта і формують полілінії на цифровому фотоплані. За цими полілініями визначають граничні піксели, які формують границі ділянок цифрового фотоплану, формування яких буде виконуватись за відповідними цифровими зображеннями знімків.

вхідні цифрові знімки
Рис.13. Принцип формування цифрового фотоплану
Формування цифрового фотоплану в межах кожної з цих ділянок виконується аналогічно процесу формування цифрового ортофотознімка.
Визначення координат X,Y вузлів полілінії в системі координат цифрового фотоплану за значеннями координат xc,yc їх зображень в системі координат цифрового зображення знімка виконується методом наближень наступним чином.
За координатами xc,yc зображення вузла розраховуються координати x,y
зображення вузла в системі координат знімка.
У випадку, якщо при внутрішньому орієнтуванні цифрового знімка використовувались афінні перетворення, ці розрахунки виконуються за формулами:
x |
a0 |
a1 |
a2 |
xc |
. |
|
y |
b0 |
b1 |
b2 |
yc |
||
|
Далі розраховують значення координат X,Y вузла в системі координат цифрового фотоплану за формулами:
X |
XS |
Z |
ZS |
X |
|
|
||
|
|
|
|
|||||
Z |
, |
(1.23) |
||||||
|
|
|
|
Y |
||||
Y |
YS |
Z |
ZS |
|
|
|||
|
|
|
|
|||||
Z |
|
|
||||||
в яких |
|
|
|
|
|
|
|
|
|
X |
x |
x0 |
|
|
|||
Y A y y0 Z  f
f
В першому наближенні значення висоти вузла приймають рівною середньому значенню висот точок цифрової моделі рельефу Z1.
За розрахованими значеннями X1,Y1 по цифровій моделі рельєфу методом білінійної інтерполяції визначають уточнене значення висоти вузла Z2 ,і за ним - уточнене значення координат вузла X2,Y2. За цими координатами, в свою чергу, визначають нове значення висоти вузла Z3.
Розрахунок продовжують до тих пір, поки різниці значень координат X та Y вузла в наближеннях не будуть перевищувати встановленого допуску. Можливий варіант, в якому контролюється різниця висот точок вузла в наближеннях.
Процес визначення координат X,Y вузлів полілінії методом наближень представлено на рис.14.
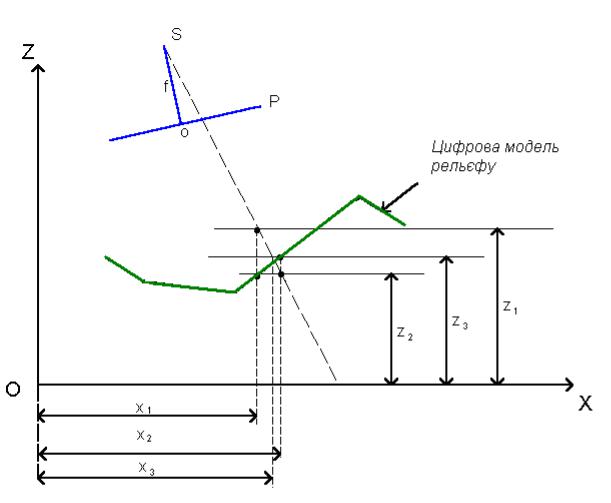
Рис.14.
Оцінка точності цифрових трансформованих фотознімків і фотопланів
Створені в результаті цифрового трансформування знімків цифрові зображення місцевості за точністю повинні відповідати вимогам, що висуваються нормативними документами, якщо фотоплани призначені для створення кадастрових і топографічних карт (планів) чи технічного завдання на виконання робіт, якщо фотоплани створюються для вирішення інших задач.
Контроль створених трансформованих фотознімків і фотопланів виконують за розходженнями значень координат контрольних точок, виміряних на цифровому плані і координат цих точок, визначених геодезичними методами чи в результаті побудови мережі просторової фототріангуляції.
В якості контрольних точок вибираються тільки точки, розташовані безпосередньо на земній поверхні, так як зображення об’єктів місцевості над поверхнею землі (дахи, мости і т.п.) мають на фотопланах спотворення.
Контроль фотопланів виконується також за розходженнями однойменних контурів вздовж лінії порізу (граничної лінії) суміжних трансформованих знімків. У випадку, коли трансформовані фотознімки і фотоплани використовуватимуться для створення
топографічних і кадастрових карт чи планів, розходження в плані положення контрольних точок не повинні перевищувати величини 0.5 мм в масштабі створюваної карти (плану), а розходження однойменних контурів на граничній лінії - величини 0.7 мм.
При цифровому трансформуванні знімків з метою контролю точності визначеня елементів орієнтування вихідних знімків і точності побудови цифрової моделі рельефу місцевості, перед формуванням цифрових трансформованих зображень виконують апріорну оцінку їх точності.
Апріорна оцінка точності виконується за контрольними точками шляхом порівнянння значень їх істинних планових координат і значень координат розрахункового положення зображення контрольної точки на трансформованому зображенні.
Визначення планових координат розрахункового положення зображення контрольної точки виконується за значеннями координат зображень контрольних точок на вихідних знімках, значениями елементів внутрішнього і зовнішнього орієнтування знімків, параметрами внутрішнього орієнтування знімка в системі координат цифрового зображення з використанням цифрової моделі рельефу. При цьому використовується алгоритм, аналогічний алгоритму визначення координат кутів граничної лінії на фотоплані.
При визначенні координат в якості початкового наближення, використовується висота контрольної точки, значення якої було визначене в результаті геодезичних чи фотограмметричних побудов.
Проведенння апріорної оцінки точності дозволяє проконтролювати якість фотограмметричних робіт, виконуваних для забезпечення процесу цифрового трансформування і при необхідності повторити ці процеси.