

7. Структурные схемы. Основные элементы структурных схем. Правила преобразования структурных схем.
Основные правила составления и преобразования структурных схем
Структурная схема — это совокупность элементарных звеньев объекта и связей между ними.
При исследовании и расчёте систем автоматического управления исходят из математического описания происходящих в них физических процессов. Обычно это описание бывает представлено в виде системы дифференциальных уравнений, выражающих связи между переменными величинами и их производными. Такой подход, когда уравнения описывают поведение исследуемой системы в целом, является наиболее общим в математическом плане и применимым во всех случаях.
Вместе с тем для большого класса систем автоматического управления (линейных систем) широко применяется и другой способ, связанный с использованием операторного метода. При этом способе исследуемая система разделяется на части – звенья направленного действия, обладающие свойством передачи сигнала только в одном направлении: от входа к выходу. Совокупность этих звеньев совместно с линями связи между ними, характеризующими их взаимодействие, образует структурную схему системы управления.
Таблица.7.1. Элементы структурных схем
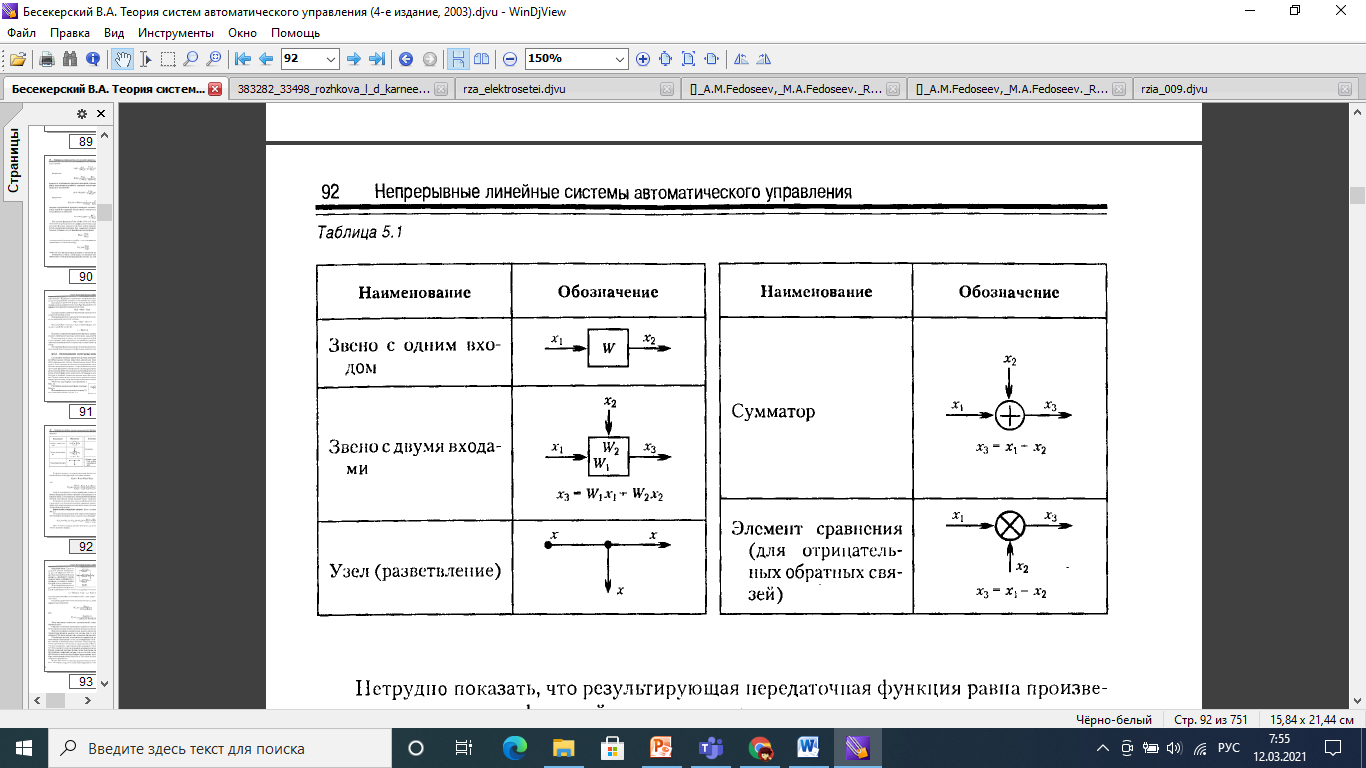
Между функциональными и структурными схемами есть определенная общность – те и другие отражают процесс передачи и переработки информации в замкнутом контуре системы управления. Однако между ними существует и чёткое различие: функциональные схемы характеризуют систему по составу входящих в неё элементов, рассматриваемых с точки зрения их назначения, т.е. выполняемых ими функций; структурные схемы состоящие из звеньев направленного действия, описывают математически динамические свойства системы.
Передаточная функция каждого звена направленного действия представляет собой записанное в операторной форме и разрешённое относительно изображения выходной величины дифференциальное уравнение данного звена. Таким образом, задача составления дифференциальных уравнений системы автоматического управления в целом сводится к составлению уравнений отдельных звеньев. Получаемый при этом выигрыш в части трудоёмкости становится более очевидным, так как на практике в подавляющем большинстве случаев структурные схемы систем автоматического управления представляют собой различные комбинации небольшого числа так называемых типовых звеньев направленного действия, передаточные функции и динамические свойства, которых могут быть определены раз и навсегда.
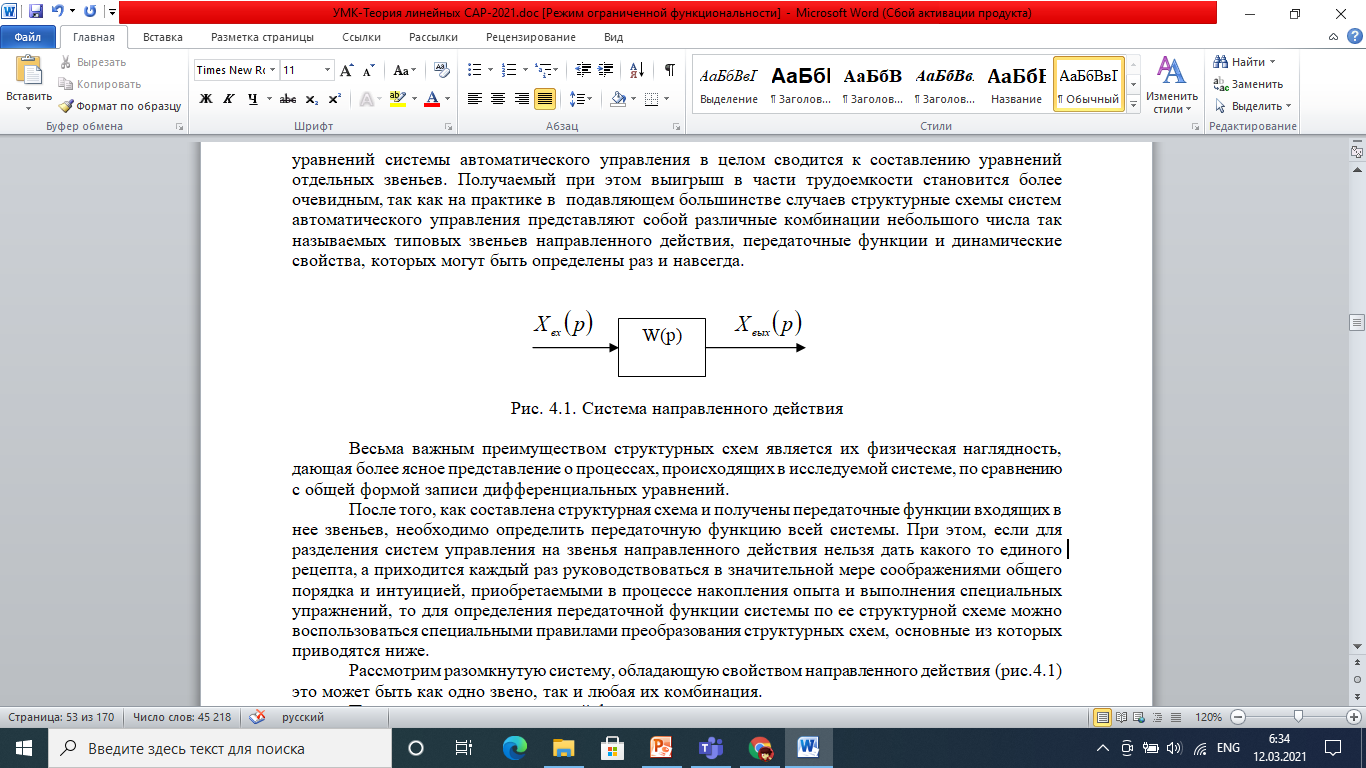
Рис. 7.1. Система направленного действия
Весьма важным преимуществом структурных схем является их физическая наглядность, дающая более ясное представление о процессах, происходящих в исследуемой системе, по сравнению с общей формой записи дифференциальных уравнений.
После того, как составлена структурная схема и получены передаточные функции входящих в неё звеньев, необходимо определить передаточную функцию всей системы. При этом, если для разделения систем управления на звенья направленного действия нельзя дать какого-то единого рецепта, а приходится каждый раз руководствоваться в значительной мере соображениями общего порядка и интуицией, приобретаемыми в процессе накопления опыта и выполнения специальных упражнений, то для определения передаточной функции системы по её структурной схеме можно воспользоваться специальными правилами преобразования структурных схем, основные из которых приводятся ниже.
Рассмотрим разомкнутую систему, обладающую свойством направленного действия (рис.7.1) это может быть как одно звено, так и любая их комбинация.
По определению передаточной функции

откуда следует основное свойство направленной системы
![]()
т.е. операторное изображение выходной величины равняется передаточной функции системы, умноженной на изображение входной величины.