

Пропорционально-интегральный (пи-) регулятор.
Передаточная функция регулятора

В зависимости от выбранного способа настройки замкнутой системы регулирования ПИ-регулятор бывает удобно представить или последовательным соединением интегрального и форсирующего звеньев с постоянными времени T1 и T2, или параллельным включением интегрирующего звена с постоянной времени T1 и пропорционального с коэффициентом усиления k (см. рис. 14.4 а). Первую форму записи передаточной функции ПИ-регулятора применяют при расчётном (аналитическом) выборе его параметров, когда передаточную функцию неизменяемой части системы представляют последовательным соединением инерционных звеньев. Вторая форма записи удобна при экспериментальной настройке контура регулирования с ПИ-регулятором, когда сначала настраивают П-канал, а затем вводят И-канал так, чтобы не нарушить условия устойчивости контура.
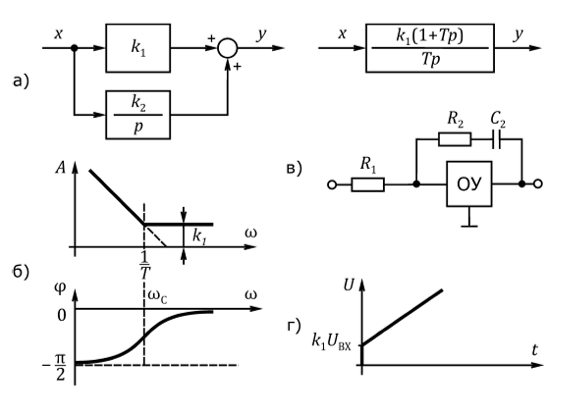
Рис. 14.4. Пропорционально-интегральное (ПИ-) звено: а) варианты структурной схемы; б) логарифмические амплитудная и фазовая характеристики; в) ПИ-регулятор; г) переходная функция
При малых частотах входного сигнала ПИ-регулятор ведёт себя, как И-регулятор, а при высоких, – как П-регулятор. Это является его ценным свойством, так как позволяет совместить положительные качества обоих регуляторов. Благодаря И-каналу схема с ПИ-регулятором имеет нулевую статическую ошибку по задающему сигналу, а благодаря П-каналу быстродействие в большом числе случаев можно иметь выше, чем в схеме с И-регулятором.
Выбор параметров ПИ-регулятора, когда
задана ЛАЧХ объекта регулирования,
производят так, чтобы частота сопряжения
регулятора
 лежала
левее частоты среза настраиваемого
контура. В этом случае ослабляется
неблагоприятное влияние И-канала на
устойчивость контура регулирования,
так как динамические свойства регулятора
в районе средних частот аппроксимируются
П-каналом. Обычно выбирают
лежала
левее частоты среза настраиваемого
контура. В этом случае ослабляется
неблагоприятное влияние И-канала на
устойчивость контура регулирования,
так как динамические свойства регулятора
в районе средних частот аппроксимируются
П-каналом. Обычно выбирают
 .
.
37. Что такое стандартные настройки регуляторов? Стандартные настройки
Для определенного вида часто встречающихся передаточных функций неизменяемой части системы удаётся получить сравнительно простые приближенные рекомендации по предварительному выбору параметров типовых регуляторов. Эти рекомендации получили название стандартных настроек.
Первый случай. Структурная схема неизменяемой части системы представлена последовательным соединением n инерционных звеньев с передаточной функцией:

В этом случае постоянную времени
 интегрального регулятора рекомендуется
выбирать из соотношения:
интегрального регулятора рекомендуется
выбирать из соотношения:

где
 – сумма постоянных времени всех
инерционных звеньев, входящих в
неизменяемую часть системы регулирования.
– сумма постоянных времени всех
инерционных звеньев, входящих в
неизменяемую часть системы регулирования.
Если в качестве корректирующего звена выбран ПИ-регулятор, то его представляют последовательным соединением пропорционального (где-то используется ещё слово форсирующее) и интегрирующего звеньев:
 .
.
Рассматривая теперь пропорциональное
звено как дополнительное средство
последовательной коррекции с опережающей
фазой, выбирают величину его постоянной
времени
 так,
чтобы нейтрализовать неблагоприятное
влияние на устойчивость настраиваемой
системы инерционного звена с наибольшей
постоянной времени. Учитывая также
стремление к простоте выкладок, обычно
принимают в расчётах
так,
чтобы нейтрализовать неблагоприятное
влияние на устойчивость настраиваемой
системы инерционного звена с наибольшей
постоянной времени. Учитывая также
стремление к простоте выкладок, обычно
принимают в расчётах

где
 – наибольшая из постоянных времени
инерционных звеньев, входящих в
неизменяемую часть системы.
– наибольшая из постоянных времени
инерционных звеньев, входящих в
неизменяемую часть системы.
Постоянную времени в ПИ-регуляторе определяют по аналогии с предыдущим случаем, когда в качестве звена коррекции был включен И-регулятор:

Здесь
 – сумма постоянных времени инерционных
звеньев неизменяемой части системы,
кроме одной самой большой
.
Постоянную времени
под знаком суммы при выборе
не учитывают потому, что неблагоприятное
влияние на устойчивость контура
инерционного звена с этой постоянной
времени было подавлено введением
форсирующего звена с постоянной времени
.
– сумма постоянных времени инерционных
звеньев неизменяемой части системы,
кроме одной самой большой
.
Постоянную времени
под знаком суммы при выборе
не учитывают потому, что неблагоприятное
влияние на устойчивость контура
инерционного звена с этой постоянной
времени было подавлено введением
форсирующего звена с постоянной времени
.
Применение ПИ-регулятора наиболее эффективно в тех случаях, когда объект регулирования содержит инерционное звено, постоянная времени, которого заметно (в 2 и более раз) преобладает над остальными. В этом случае удаётся увеличить быстродействие настраиваемого контура по сравнению со схемой с И-регулятором.
Включение ПИ-регулятора не даёт эффекта, если все постоянные времени объекта регулирования близки между собой. Более того, применение ПИ-регулятора (а тем более П-регулятора) в этом случае может оказаться даже нежелательным, так как бывает трудно обеспечить стабильность частоты среза контура при отклонении параметров объекта регулирования от ожидаемых значений.
Вот пример, чтобы примерно понять, что происходит в формулах, но тут тоже особо понимания не прибавится.
Пример 14.1.
В контуре регулирования тока якоря
электропривода постоянного тока (см.
рис. 14.5) заданы следующие параметры
звеньев неизменяемой части системы
регулирования:


 .
.
Так как ТЯ
> ТП
> ,
то есть ТЯ =
0,1с = ТМАКС,
то выбираем Т2 =
ТМАКС
= ТЯ =
0,1с.
,
то есть ТЯ =
0,1с = ТМАКС,
то выбираем Т2 =
ТМАКС
= ТЯ =
0,1с.
Тогда

Второй случай. Неизменяемая часть системы, кроме n инерционных звеньев, содержит также интегратор с постоянной времени ТОР, так что передаточная функция неизменяемой части

Если в схеме применён П-регулятор и необходимо определить желаемое значение его коэффициента усиления k, то сначала вводят расчётную постоянную времени интегрирующего звена.

после чего, применив правило технического оптимума, определяют

Если в системе регулирования установлен ПИ-регулятор, то выбор параметров этого регулятора производят в два этапа: на первом этапе настраивают П-канал, а затем – И-канал. Идея выбора параметров состоит в том, чтобы в районе частоты среза заставить работать только П-канал в регуляторе, а интегральному каналу оставить только район низких частот. Количественные рекомендации для этого случая дает правило симметричного оптимума, которое предлагает отодвинуть влево частоту сопряжения И- и П-каналов в регуляторе в соответствии с выражением:
 .
.
Здесь – постоянная времени форсирующего канала в ПИ-регуляторе; – частота среза настраиваемого контура регулирования.