

Введение в закон регулирования интеграла.
Рассмотрим одноконтурную систему автоматического регулирования, в которую включено последовательное корректирующее устройство, вводящее в закон регулирования величину, пропорциональную интегралу от отклонения регулируемой величины.
Пусть передаточная функция системы представлена без последовательного корректирующего устройство 𝑊(p).
При включении последовательно с системой корректирующего устройства с интегрирующим звеном в систему будет подаваться сумма отклонения регулируемой величины х1 и величины, пропорциональной её интегралу.

В операторной форме эта сумма имеет вид

Передаточная функция системы с интегрирующим устройством
Уравнение амплитудно-фазовой характеристики системы и интегрирующим устройством

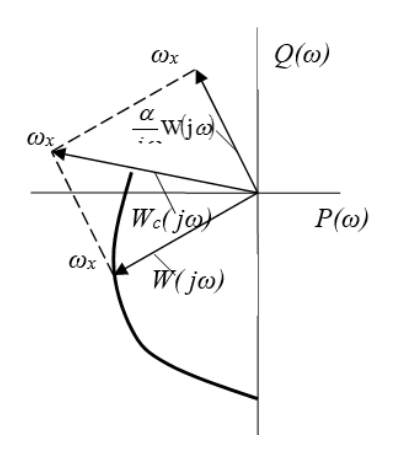
Рис. 11.4. Введение в закон регулирования интеграла
Переходя к показательной форме, получим

Из выражения (11.24) следует, что при
введении в закон регулирования интеграла
к векторам 𝑊(𝑗𝜔)
амплитудно-фазовой характеристики
системы без корректирующего устройства
добавляются векторы
 𝑊(𝑗𝜔),
повёрнутые относительно первых в
отрицательном направлении (по часовой
стрелке) на 90° (рис.
11.4).
𝑊(𝑗𝜔),
повёрнутые относительно первых в
отрицательном направлении (по часовой
стрелке) на 90° (рис.
11.4).
Введение дополнительного воздействия по интегралу приводит к увеличению коэффициента усиления системы, что видно из рис. 11.4, и её быстродействия, а также к снижению степени устойчивости системы.
В то же время введение воздействия по интегралу приводит к увеличению статической точности в установившемся режиме. Это становится очевидным на основании следующих рассуждений.
Передаточная функция замкнутой системы без корректирующего устройства
Предположим, что статическая система, для которой погрешность регулирования в установившемся режиме равна постоянной величине и действительное значение регулируемой величины отличается от заданного на эту постоянную величину. Введем в систему дополнительное воздействие по интегралу. Тогда передаточная функция скорректированной системы

В установившемся режиме при 𝑝
→ 0,
 →
1, т.е. в этом случае действительное
значение регулируемой величины равно
заданному. Погрешность регулирования
равно нулю. Поэтому последовательное
корректирующее устройство с воздействием
по интегралу вводится в тех случаях,
когда необходимо увеличить статическую
точность системы.
→
1, т.е. в этом случае действительное
значение регулируемой величины равно
заданному. Погрешность регулирования
равно нулю. Поэтому последовательное
корректирующее устройство с воздействием
по интегралу вводится в тех случаях,
когда необходимо увеличить статическую
точность системы.
Дальше надо знать плюсы и минусы
Достоинством последовательных корректирующих устройств являются простата и дешевизна, так как в большинстве случаев они могут быть выполнены из пассивных четырёхполюсников, содержащих ёмкости и активные сопротивления.
Недостатками последовательных корректирующих устройств являются:
– высокая чувствительность к изменению параметров остальных звеньев системы, что выдвигает повышенные требования к стабильности параметров звеньев;
– высокая чувствительность к помехам, накладывающимся на основной сигнал.
Последовательные корректирующие устройства применяются главным образом в маломощных устойчивых системах для улучшения качества переходных процессов, а также в системах автоматического регулирования сложных технологических объектов, в которых конструктивно нельзя применить параллельные корректирующие устройства