

Частотные оценки качества процесса регулирования
Частотные оценки производятся по
частотным характеристикам как замкнутой,
так и разомкнутой системы регулирования.
Когда пользуются частотной характеристикой
замкнутой системы, то обычно оценивают
величины: показатель колебательности
 ,
резонансную (собственную) частоту
,
резонансную (собственную) частоту
 и
полосу пропускания
и
полосу пропускания
 (рис. 10.1).
(рис. 10.1).
Показатель колебательности

– это отношение максимального значения
амплитудной частотной характеристики
 замкнутой системы к её значению
замкнутой системы к её значению
 при
при
 .
Чем выше
,
тем более склонна к колебаниям система
регулирования. Практикой установлено,
что для системы, обладающей удовлетворительным
качеством процессов,
.
Чем выше
,
тем более склонна к колебаниям система
регулирования. Практикой установлено,
что для системы, обладающей удовлетворительным
качеством процессов,
 .
.
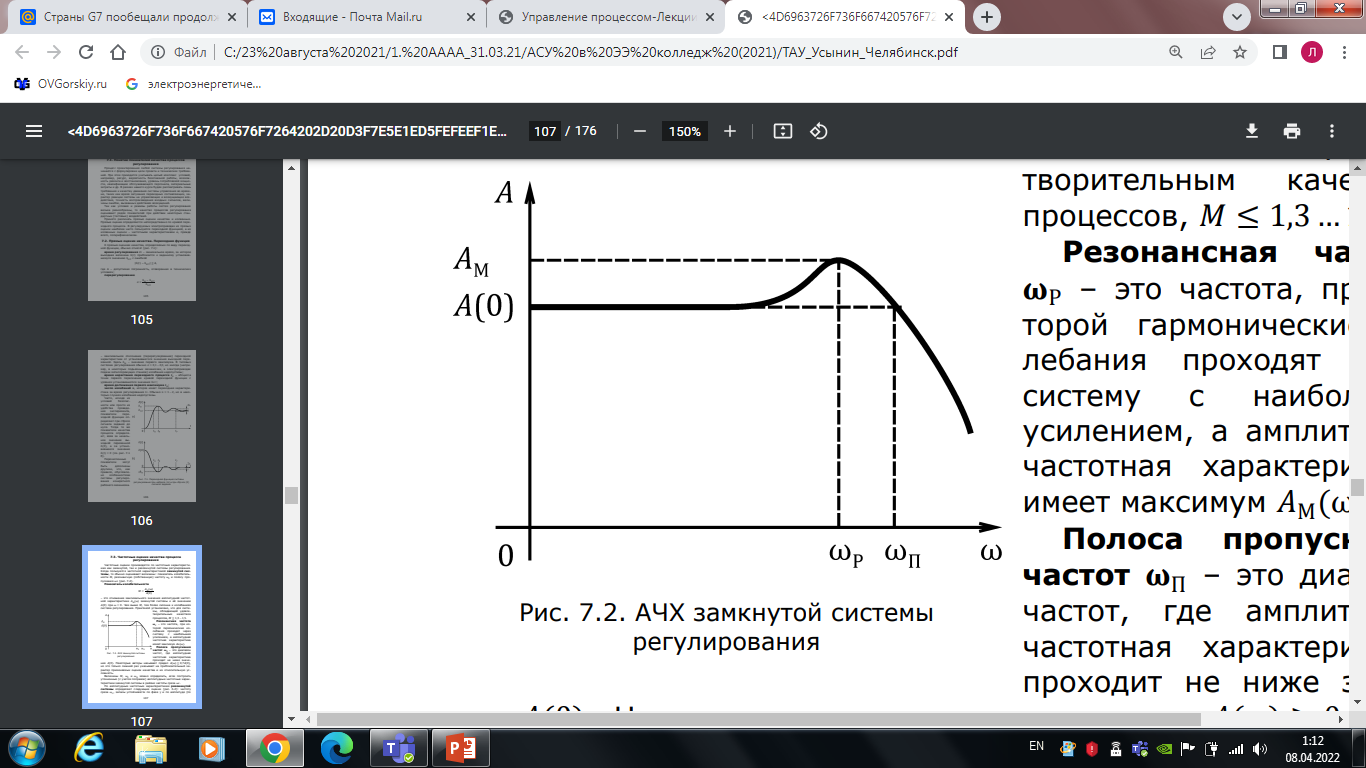
Рис. 10.1. АЧХ замкнутой системы регулирования
Резонансная частота – это частота, при которой гармонические колебания проходят через систему с наибольшим усилением, а амплитудная частотная характеристика имеет максимум .
Полоса пропускания частот
– это диапазон частот, где амплитудная
частотная характеристика проходит не
ниже значения
.
Величины M,
и
можно определить, если построить
уточненные (с учетом поправок) амплитудные
частотные характеристики замкнутой
системы в районе частоты среза
 .
.
По амплитудным частотным характеристикам разомкнутой системы определяют следующие оценки (рис. 10.2): частоту среза , запасы устойчивости по фазе γ и по амплитуде (по модулю). Наиболее широко пользуются логарифмическими частотными характеристиками, построение которых требует минимальных затрат, но вместе с тем дает наиболее ясную связь со структурой и параметрами корректирующих связей.
Частота среза – это частота, при которой значение амплитудной характеристики разомкнутой системы равно единице (а ЛАЧХ разомкнутой системы пересекает ось частот). Величина косвенно связана с быстродействием системы: чем выше , тем выше быстродействие.
Степень демпфирования процессов или, наоборот, склонность системы к колебаниям характеризуют запасы устойчивости. Запас устойчивости по фазе принимают обычно в пределах 30...60 градусов, а по амплитуде – от 3 до 10 децилог.
Рассмотренные нами примеры оценок качества процессов регулирования далеко не исчерпывают весь существующий перечень, что обусловлено большим разнообразием, а порой противоречивостью технических требований к конкретным системам.
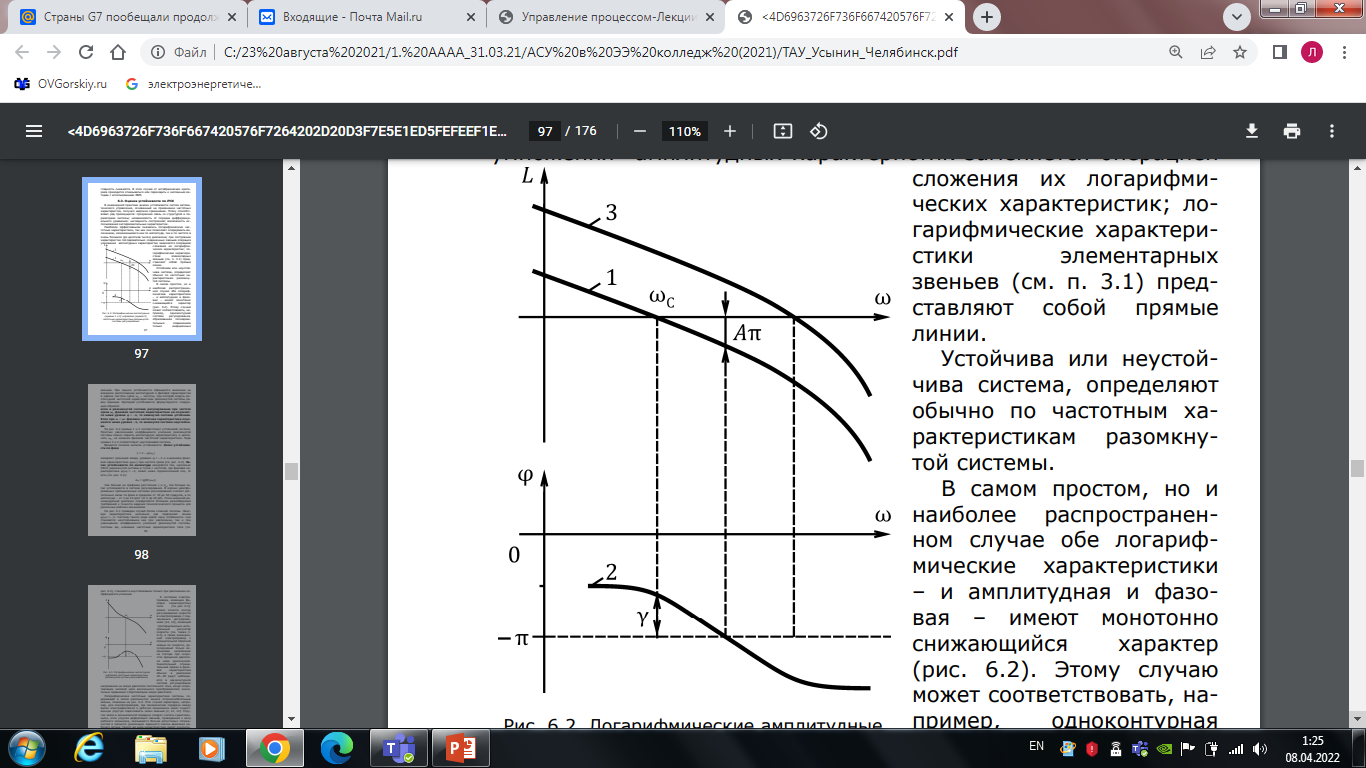
Рис. 10.2. Логарифмические амплитудные (кривые 1 и 3) и фазовая
(кривая 2) частотные характеристики разомкнутой системы регулирования
Устойчива или неустойчива система, определяют обычно по частотным характеристикам разомкнутой системы. В самом простом, но и наиболее распространённом случае обе логарифмические характеристики – и амплитудная и фазовая – имеют монотонно снижающийся характер (рис. 10.2). Этому случаю может соответствовать, например, одноконтурная система регулирования, образованная последовательным соединением только инерционных звеньев.
При оценке устойчивости обращается внимание на взаимное расположение амплитудной и фазовой характеристик в районе частоты среза – частоты, при которой модуль амплитудной частотной характеристики разомкнутой системы равен единице.
Критерий устойчивости формулируется
следующим образом: если в разомкнутой
системе регулирования при частоте среза
фазовая частотная характеристика не
опускается ниже уровня
 ,
то замкнутая система устойчива. Если
при
,
то замкнутая система устойчива. Если
при
 фазовая
частотная характеристика опускается
ниже уровня
фазовая
частотная характеристика опускается
ниже уровня
 ,
то замкнутая система неустойчива.
,
то замкнутая система неустойчива.
На рис. 10.2 кривые 1 и 2 соответствуют устойчивой системе. Простым увеличением коэффициента усиления разомкнутой системы можно поднять амплитудную характеристику и увеличить , не изменяя фазовой частотной характеристики. Пара кривых 3 и 2 соответствует неустойчивой системе.
Вводится понятие запасов устойчивости. Запас устойчивости по фазе

измеряют разницей между уровнем
и значением фазовой характеристики
 при частоте среза (см. рис. 10.2). Запас
устойчивости по амплитуде измеряется
тем, насколько ЛАЧХ разомкнутой системы
в точке с частотой, где фазовая
характеристика
при частоте среза (см. рис. 10.2). Запас
устойчивости по амплитуде измеряется
тем, насколько ЛАЧХ разомкнутой системы
в точке с частотой, где фазовая
характеристика
 ,
лежит ниже горизонтальной оси, то есть
(см. рис. 10.2):
,
лежит ниже горизонтальной оси, то есть
(см. рис. 10.2):
 .
.
Чем больше на графиках расстояния
 и
и
 тем
больше запас устойчивости в системе
регулирования. В хорошо демпфированных
промышленных системах регулирования
считают достаточным запас по фазе в
пределах от 30 до 60 градусов, а по амплитуде
– от 3 до 10 длог (от 6 до 20 дб). Столь широкий
рекомендуемый диапазон определяется
большим разнообразием требований к
точности ведения технологического
процесса для различных рабочих механизмов.
тем
больше запас устойчивости в системе
регулирования. В хорошо демпфированных
промышленных системах регулирования
считают достаточным запас по фазе в
пределах от 30 до 60 градусов, а по амплитуде
– от 3 до 10 длог (от 6 до 20 дб). Столь широкий
рекомендуемый диапазон определяется
большим разнообразием требований к
точности ведения технологического
процесса для различных рабочих механизмов.