

Прямые показатели качества переходных процессов сау по задающему воздействию
Если переходные процессы рассчитываются, то в качестве решения получают переходную функцию САУ – реакцию на единичное ступенчатое воздействие (рис.8.3).
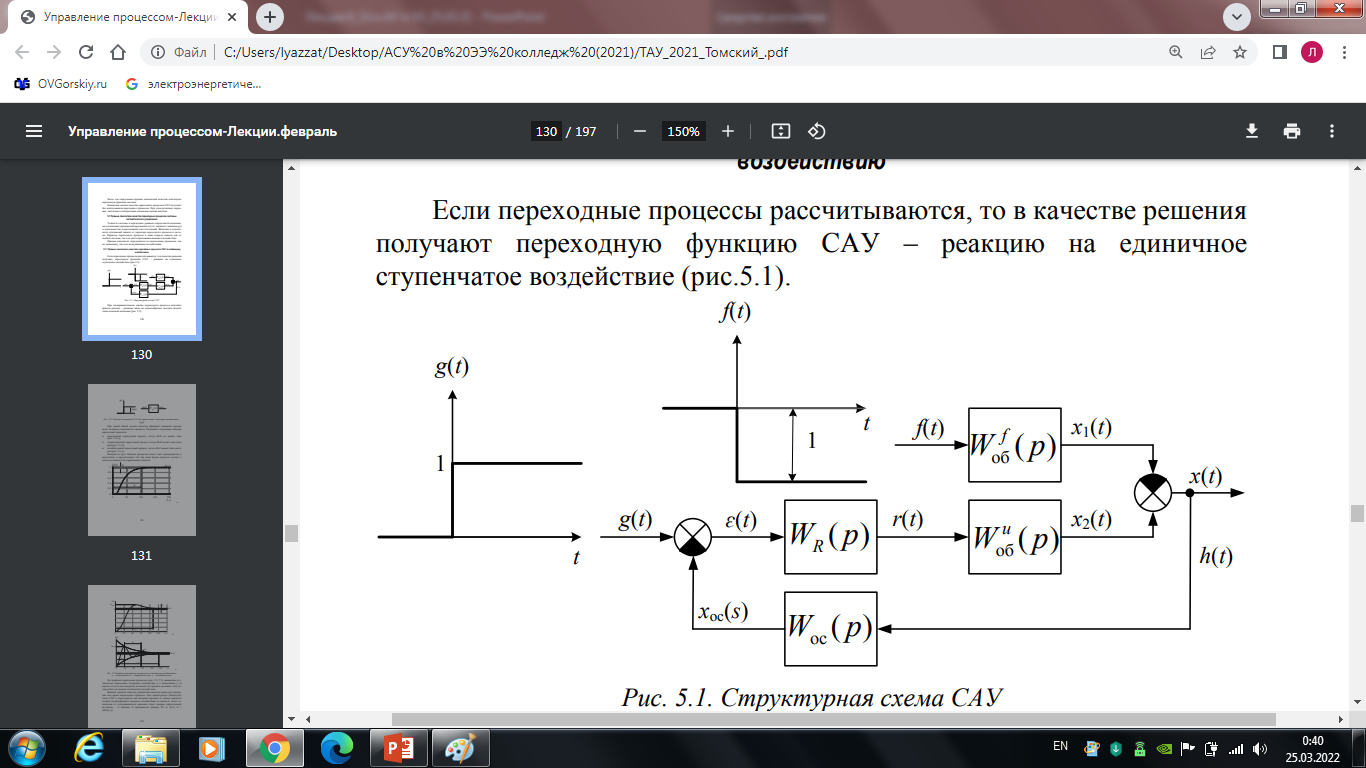
Рис. 8.3. Структурная схема САУ
При экспериментальном снятии переходного процесса получают кривую разгона - реакцию звена на скачкообразное входное воздействие конечной величины (рис. 8.4).

Рис. 8.4. Реакция замкнутой САУ на ступенчатое задающее воздействие – ∆g(t)
При самой общей оценке качества обращают внимание прежде всего на форму переходного процесса. Различают следующие типовые переходные процессы:

Рис. 8.5. Графики переходных процессов по задающему воздействию:
а – монотонного; б – апериодического; в – колебательного
- монотонный переходный процесс, когда dh/dt не меняет знак (рис. 8.5, а);
- апериодический переходный процесс, когда dh/dt меняет знак один раз (рис. 8.5, б);
- колебательный переходный процесс, когда dh/dt меняет знак много раз (рис. 8.5, в).
Каждый из трёх типовых процессов имеет свои преимущества и недостатки, и предпочтение той или иной форме процесса делают с учётом особенностей управляемого объекта.
На графиках переходных процессов (рис. 8.5.), вызванных ступенчатым изменением задающего воздействия g и возмущения f, за начало отсчёта для выходной величины x(t) принято значение x(-0), которое было до подачи ступенчатого воздействия.
Важной оценкой качества управления является время регулирования или время переходного процесса. Оно характеризует быстродействие САУ и определяется как интервал времени от начала (момента подачи скачкообразного входного воздействия) до момента, когда отклонение от установившегося значения станет меньше определенной величины - Δ (обычно Δ принимается равным 5% от h(∞); Δ = 0,05h(∞)):
 при
при
 (8.3)
(8.3)
Перерегулирование σ: одним из главных прямых показателей качества является перерегулирование σ (для апериодических и колебательных переходных процессов), которое равно отношению разницы первого максимального отклонения управляемой переменной от её установившегося значения к этому установившемуся значению, выраженное в относительных единицах или процентах:
 .
(8.4)
.
(8.4)
Для нормально функционирующих САУ σ = (10 ÷ 30) %.
Степень затухания
 прямым
показателем качества служит также
степень затухания (для колебательных
переходных процессов), которая равна
отношению разности двух соседних
амплитуд колебаний, направленных в одну
сторону к первой из них:
прямым
показателем качества служит также
степень затухания (для колебательных
переходных процессов), которая равна
отношению разности двух соседних
амплитуд колебаний, направленных в одну
сторону к первой из них:
(8.5)
Интенсивность затухания колебаний в системе считается удовлетворительной, если ψ = 0,75 ÷ 0,95.
Дополнительными временными показателями
качества для колебательных переходных
процессов являются время нарастания
 ,
время достижения первого максимума tм
и период затухающих колебаний
,
время достижения первого максимума tм
и период затухающих колебаний
 .
.
Колебательность системы можно
оценивать числом переходов управляемой
координатой через её установившееся
значение на интервале
 –
это число колебаний равное
–
это число колебаний равное
 .
Обычно приемлемым числом колебаний
считается
.
Обычно приемлемым числом колебаний
считается
 (допускается
до 3, 4 колебания).
(допускается
до 3, 4 колебания).
Дальше идёт снова нужная фигня и я не ебу, как это учить.