

Различие статических и астатических сар по отношению к задающим и возмущающим воздействиям
Различия есть. В статических САР, при различных значениях возмущающих величин, будет различное значение регулируемых величин. В астатических САР значение такой ошибки всегда будет постоянной и абсолютно не зависящей от значения возмущающего сигнала.
По отношению к управляющему же воздействию в статических системах присутствует постоянная ошибка, величина которой будет зависеть от величины управляющего сигнала. В астатических САР по окончанию переходного процесса ошибка будет равна нулю.
Ниже показаны переходные процессы в статических и астатических САР по отношению к управляющему g(t) воздействию:
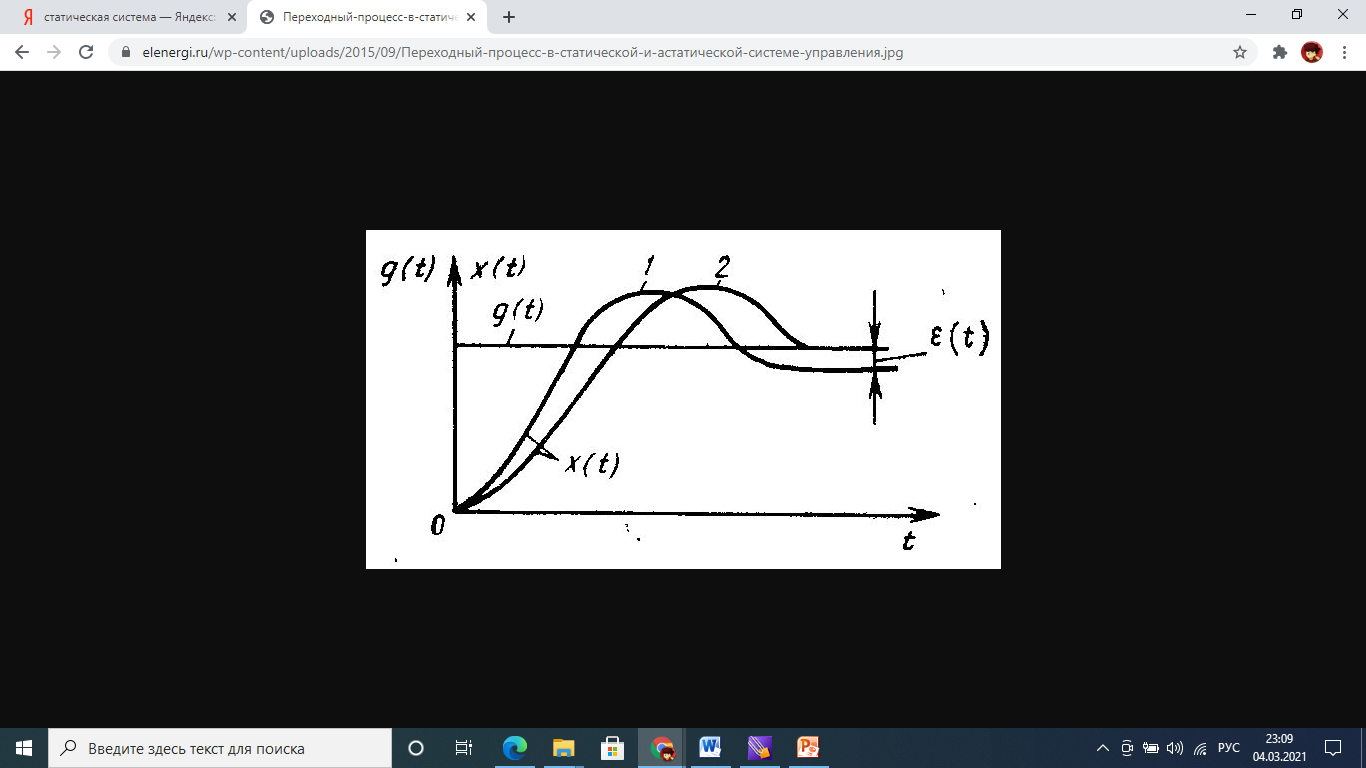
Рис. 7.8. переходные процессы в статических и астатических САР по отношению к управляющему g(t) воздействию
ε(t) – ошибка регулирования, х(t) – выходная величина системы: 1- САР статическая; 2 – САР астатическая.
Отличия по возмущающему f(t) воздействию:
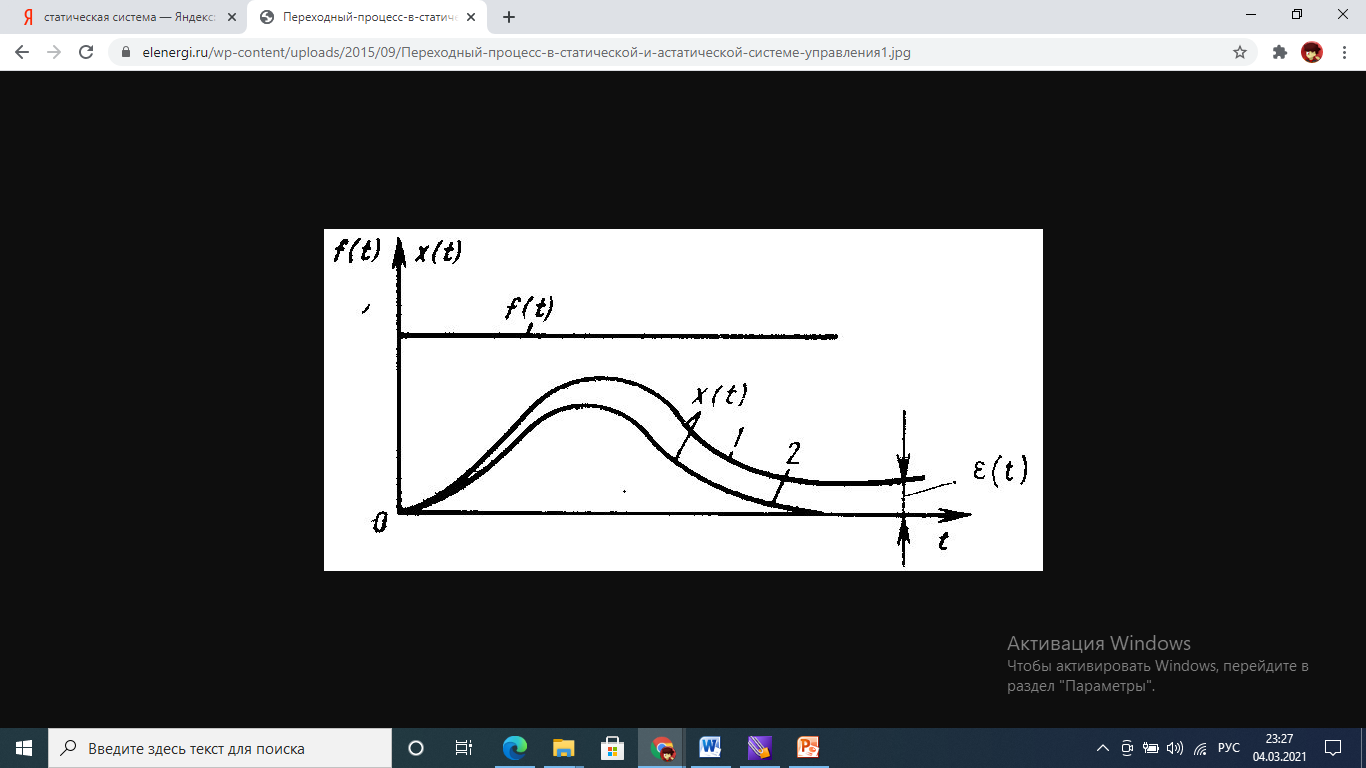
Рис. 7.9. переходные процессы в статических и астатических САР по отношению к возмущающему f(t) воздействию
ε(t) – ошибка регулирования: 1- САР статическая; 2 –САР астатическая.
27. Методы оценки качества управления, показатели качества управления.
Ебанутейший вопрос, потому что судя по всему, сюда надо писать целых полторы лекции нахуй.
Качество автоматической системы управления определяется совокупностью свойств, обеспечивающих эффективное функционирование как самого объекта управления, так и управляющего устройства, т. е. всей системы управления в целом. Свойства, составляющие эту совокупность и имеющие количественные измерители, называют показателями качества системы управления.
Качество автоматической системы, как и любого технического устройства, может быть оценено такими общепринятыми показателями, как вес системы, её габариты, стоимость, надёжность, долговечность и т.п.
То есть совокупность этих общетехнических показателей характеризуют качество автоматической системы в широком смысле.
Точность системы в установившихся режимах как одна их важнейших характеристик качества управления. Точность системы в переходных режимах оценивают при помощи прямых и косвенных показателей. Прямые показатели качества определяют по графику переходного процесса, возникающего в системе при ступенчатом внешнем воздействии.
Часто для определения прямых показателей качества используют переходную функцию системы. Косвенные оценки качества переходных процессов САУ получают без использования переходных процессов. При этом различают корневые, частотные и интегральные косвенные оценки качества.
Прямые показатели качества переходных процессов системы автоматического управления
Точность системы в переходных режимах определяется величинами отклонений управляемой переменной x(t) от заданного значения g(t) и длительностью существования этих отклонений. Прямые показатели определяются по переходным процессам: как по задающему, так и по возмущающему воздействиям.
Качеством процесса регулирования называется характер переходного процесса устойчивой системы, зависящий от параметров системы регулирования и характера управляющих и возмущающих воздействий.
Показателями качества называются величины, характеризующие поведение системы в переходном процессе, вызванном каким-либо типовым внешним воздействием (наиболее часто единичным ступенчатым воздействием).
Рассмотрим прямые показатели качества.
1. Время регулирования t0—время, в течение которого отклонение регулируемой величины от заданного значения становится меньше наперёд заданной величины ∆ (рис. 8.1).
2. Величина перерегулирования — максимальное отклонение σ (у неё то σ, то δ) регулируемой величины от нового заданного значения в сторону, противоположную от начального значения. В тех случаях, когда регулируемая величина приближается к новому заданному значению только с одной стороны, не выходя за пределы, ограниченные начальным и новым заданным значениями, перерегулирование отсутствует.
3. Установившееся отклонение — величина отклонения регулируемой величины от заданного значения в установившемся процессе.
4. Характер затухания переходного процесса может быть монотонным, апериодическим или колебательным.
5. Колебательность переходного процесса - число колебаний регулируемой величины около нового установившегося её значения. Оно обычно не должно превышать заданного числа.
6. Степень затухания (для колебательных переходных процессов), которая равна отношению разности двух соседних амплитуд колебаний, направленных в одну сторону к первой из них:
 (8.5)
(8.5)
Интенсивность затухания колебаний в системе считается удовлетворительной, если ψ = 0,75 ÷ 0,95.

Рис. 8.1 - Показатели качества переходного процесса
Колебательный процесс системы высокого порядка можно разложить на отдельные составляющие, затухание которых происходит по закону
![]()
где A – начальная амплитуда колебаний;
αi – значение вещественной части комплексного корня, 1/с;
ωi – значение мнимой части комплексного корня – угловая частота колебаний, 1/с;
ψ0 – начальный сдвиг фазы, рад.
Величина периода колебаний равна

Отношение между двумя соседними максимальными отклонениями:

Дальше просто всё подробно объяснено на примере и совсем немного нового