

26. Статический режим систем автоматического управления. Способы устранения статического отклонения.
Статический режим (статика) – это режим, при котором система находится в состоянии покоя вследствие того, что все внешние воздействия и параметры самой системы не меняются во времени.
В статической системе регулирования поддерживается не строго постоянное значение регулируемой величины, а с ошибкой, которая называется статической ошибкой системы. Статизм регулирования – это относительная статическая ошибка при изменении нагрузки от холостого хода до номинальной.
Когда наличие статической ошибки недопустимо, то переходят к регулированию, в котором она равна нулю, т. е. к астатическому регулированию.
На рис. 7.4 показана схема астатического регулирования. Это схема непрямого регулирования.
Примером астатического звена является электрический двигатель с идеальной чувствительностью (при выходной величине – угол поворота).
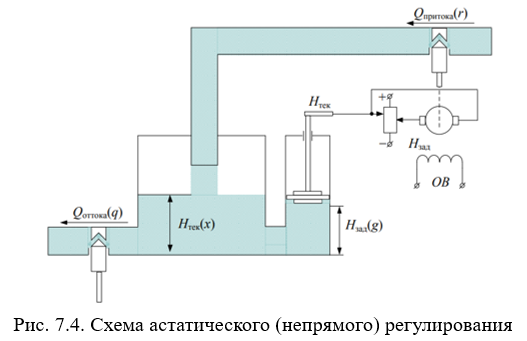
Астатическим регулированием называют такое регулирование, при котором в установившихся режимах поддерживается постоянное значение регулируемой величины x, равное заданному значению xзад, независимо от величины нагрузки q.
Характеристика астатического регулирования представляет собою прямую линию, параллельную оси нагрузки (рис 7.5). Статическая ошибка при астатическом регулировании равна нулю (теоретически); практически вследствие неточности регулятора она возможна, но не будет зависеть от нагрузки.
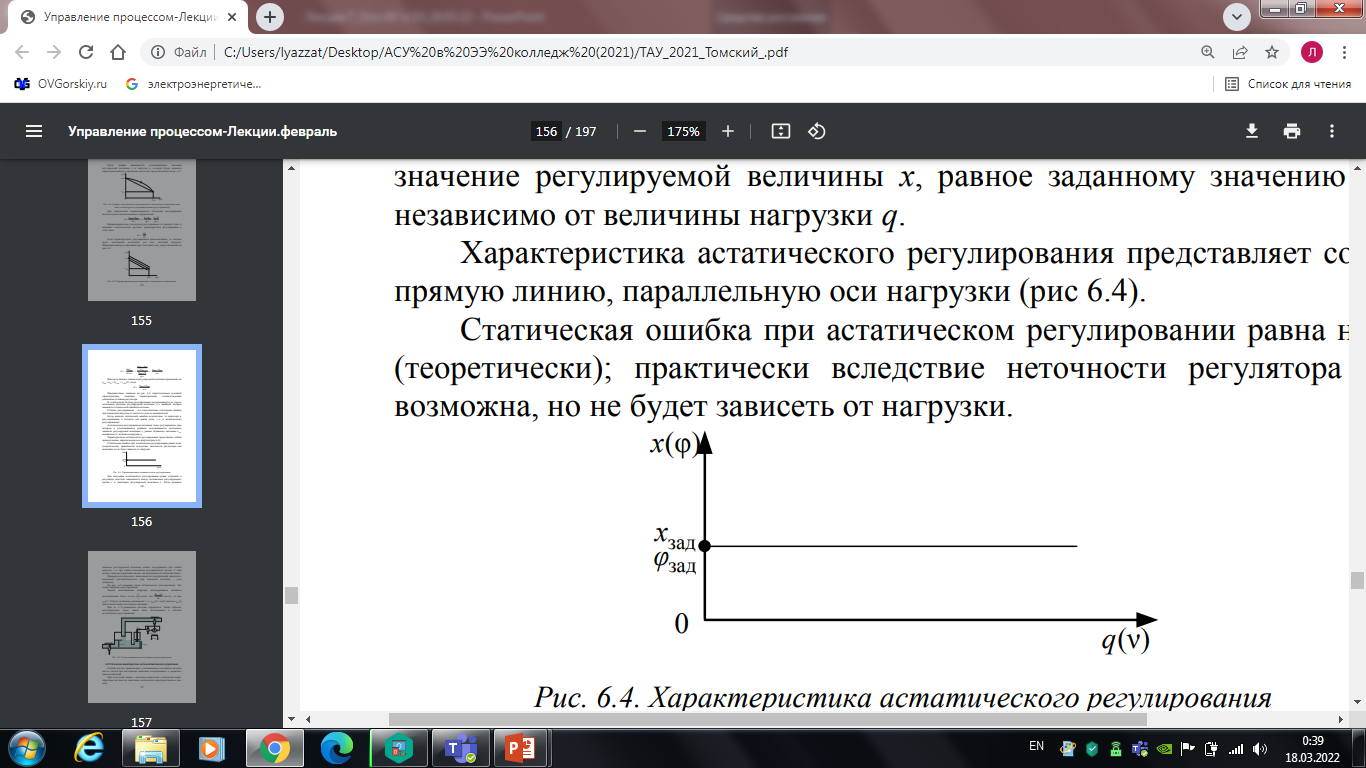
Рис. 7.5. Характеристика астатического регулирования
Для получения астатического регулирования нужно устранить в регуляторе жёсткую зависимость между положением регулирующего органа r и значением регулируемой величины x. Тогда заданное значение регулируемой величины можно поддерживать при любой нагрузке, т.е. при любом положении регулирующего органа. С этой целью в цепь регулирования вводят так называемое астатическое звено.
Звенья, выполняющие операции
интегрирования, являются астатическими.
Если
 или
или
 ,
то при
будет положение равновесия, т. е.
,
то при
будет положение равновесия, т. е.
 причём
причём
 может иметь любое постоянное значение.
может иметь любое постоянное значение.
При
 равновесие системы нарушается. Таким
образом, интегрирующее звено может быть
использовано в системе астатического
регулирования.
равновесие системы нарушается. Таким
образом, интегрирующее звено может быть
использовано в системе астатического
регулирования.
Второй способ устранения статического отклонения: введение компенсирующего воздействия.
Регулирование по возмущению (компенсацию возмущения) применяют, когда возмущения Z, которые вызывают существенное отклонение регулируемой величины y(t) от заданного значения x0(t), удаётся измерить, после чего по результатам этих измерений так скорректировать алгоритм управления объектом регулирования ОР, чтобы ошибка регулирования стала минимальной. С этой целью, кроме естественно существующего канала передачи возмущения Z и обусловленного самой физикой работы ОР, организуется дополнительный искусственный канал передачи компенсирующего сигнала xk, воздействующий через измерительное устройство (узел компенсации УК) так, чтобы действие xk было равнопротивоположным действию возмущения Z.
В простейшем случае, когда статические характеристики ОР линейны и могут быть в установившемся режиме записаны в виде линейных уравнений, результирующее отклонение приращения выходной величины:
Δy = Δy1 + Δy2 = -kz * ΔZ + kУК * kр * kx * ΔZ,
где Δy1 и Δy2 – приращения выходной величины, вызванные приложением возмущения ΔZ и компенсирующего сигнала xk; kz и kx – коэффициенты усиления объекта регулирования ОР по каналам передачи сигналов Z и X; kУК и kр – коэффициенты усиления звеньев УК и Р.
Если выбрать kz = kУК * kр * kx , то Δy = 0. То есть достигается полная компенсация возмущения Z (в нашем случае – только в статических режимах).
ЗАФ – задатчик алгоритма функционирования; БУ – блок управления.
Дальше идёт фигня, которую в этом вопросе не просят. Но зная Байназарову, она может легко это спросить как просто так, так и в качестве дополнительных вопросов)))