

15. Типовые звенья сау. Статическое звено, Апериодическое звено первого и второго порядков, колебательное.
Пропорциональное (безынерционное) звено. Пропорциональным звеном называют звено, которое описывается уравнением
 ,
,
где
 –
коэффициент усиления звена.
–
коэффициент усиления звена.
Это – наиболее простое звено, процессы в котором протекают без запаздывания. Его передаточная функция
 ,
амплитудно-фазовая характеристика
вырождается в точку на действительной
оси, логарифмическая амплитудная
частотная характеристика параллельна
оси частот во всем диапазоне частот и
проходит на уровне
,
амплитудно-фазовая характеристика
вырождается в точку на действительной
оси, логарифмическая амплитудная
частотная характеристика параллельна
оси частот во всем диапазоне частот и
проходит на уровне
 ,
фазовая частотная характеристика
совпадает с осью частот, так как
,
фазовая частотная характеристика
совпадает с осью частот, так как
 и, наконец, переходная функция этого
звена
и, наконец, переходная функция этого
звена
 повторяет без искажений входную
ступенчатую функцию (рис. 3.5).
повторяет без искажений входную
ступенчатую функцию (рис. 3.5).
Рис. 3.5. Пропорциональное звено:
а) передаточная функция;
б) амплитудно-фазовая характеристика;
в) логарифмические амплитудная и фазовая характеристики; г) переходная функция
Примерами пропорционального звена
(рис. 3.6) можно назвать делитель напряжения
(потенциометр), механический редуктор,
пропорциональный, или П-регулятор. В
последнем случае операционный усилитель
ОУ, имеющий очень высокий (до нескольких
сотен тысяч) коэффициент усиления,
охвачен схемой, содержащей резисторы
 и
и
 .
В результате регулятор – схема,
представляющая собой совокупность ОУ
и резисторов
и
,
– имеет передаточную функцию вида:
.
В результате регулятор – схема,
представляющая собой совокупность ОУ
и резисторов
и
,
– имеет передаточную функцию вида:
 .
.
Рис. 3.6. Примеры пропорциональных звеньев:
а) потенциометр;
б) механический редуктор; в) П-регулятор
Инерционное звено (апериодическое 1го порядка)
Во прикол, а она его подробно не объясняла, поэтому вот просто ловите скрин всех частотных характеристик и их построение.

И

1) Вещественная частотная характеристика (ВЧХ)
2) Мнимая частотная характеристика (МЧХ)

3) Амплитудная частотная характеристика (АЧХ)

4) Фазовая частотная характеристика (ФЧХ)

5) Логарифмическая амплитудная характеристика (ЛАЧХ)
6) Амплитудно-фазовая частотная характеристика (АФЧХ)

Колебательное звено
Колебательным (двухъёмкостным) называется звено второго порядка, в котором при получении на входе ступенчатого воздействия выходная величина стремится к новому установившемуся значению, совершая затухающие колебания.
К колебательным звеньям относятся устройства, в которых переходные режимы протекают с обменом энергией между двумя энергетическими ёмкостями, например, электрическая цепь, содержащая индуктивность, ёмкость и активное сопротивление; механическое устройство, имеющее массу, пружину и силы трения; электрический двигатель постоянного тока с независимым возбуждением, способный накапливать кинетическую энергию в якоре и электромагнитную энергию в магнитной цепи, для которого входной величиной является напряжение, приложенное к якорю, а выходной — скорость вращения якоря.
Примерами колебательного звена могут служить: упругая механическая система с существенным влиянием массы, электрический колебательный контур и т. д


Где k1 = kω0;
ω0= – угловая частота свободных колебаний
(при отсутствии затуханий);
– угловая частота свободных колебаний
(при отсутствии затуханий);
ξ – параметр затухания, лежащий в пределах 0<ξ<1.
2. Передаточная функция звена:

3. Временные характеристики колебательного звена второго порядка:
3.1 Переходная функция (рис.5.2 б):
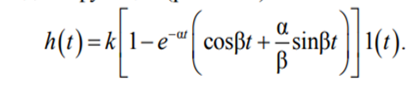
3.2 весовая функция

k – коэффициент, T – постоянная времени (в секундах), ξ – параметр затухания ( 0 < ξ < 1). Постоянная времени определяет инерционность объекта, чем она больше, тем медленнее изменяется выход при изменении входа. Чем больше ξ , тем быстрее затухают колебания.
При ξ = 0 в получается консервативное звено, которое даёт незатухающие колебания на выходе. Если ξ ≥ 1, модель представляет апериодическое звено второго порядка, то есть последовательное соединение двух апериодических звеньев.
Колебательное звено относится к позиционным звеньям, его статический коэффициент усиления равен W (0) = k .
Переходная и импульсная характеристики отличаются выраженной колебательностью, особенно при малых значениях параметра затухания ξ . На следующих двух графиках синие линии соответствуют ξ = 0,5, а красные – ξ = 0,25 .

Рис. 5.2 а. Переходная характеристика колебательного звена

Рис. 5.2.б Переходная функция колебательного звена второго порядка
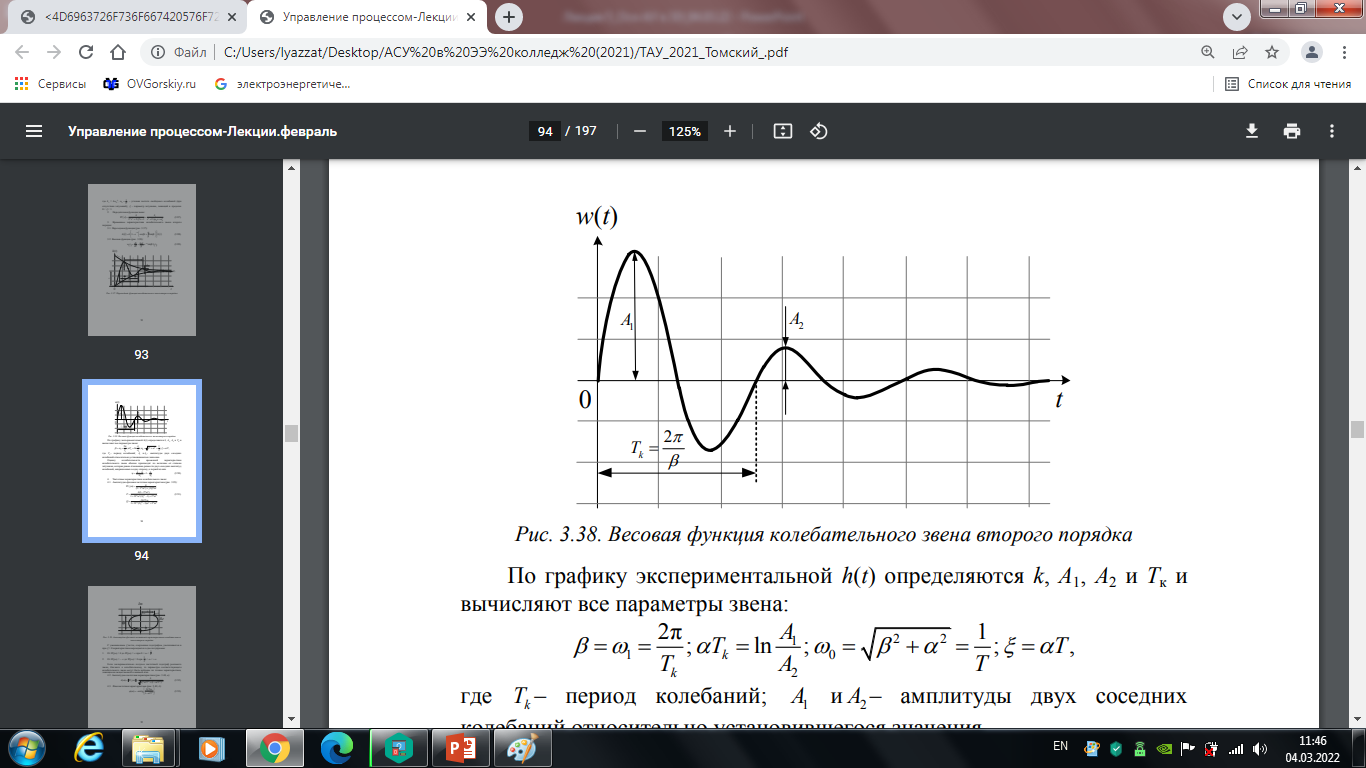
Рис. 5.3. Весовая функция колебательного звена второго порядка
По графику экспериментальной h(t) определяются k, А1, А2, и Тk и вычисляют все параметры звена:

Где Tk – период колебаний, А1 и А2 – амплитуды двух соседних колебаний относительно установившегося значения.
Оценку колебательности временной характеристики колебательного звена обычно производят по величине её степени затухания, которая равна отношению разности двух соседних амплитуд колебаний, направленных в одну сторону, к первой из них.

Частотные характеристики
Частотные характеристики колебательного звена: 4.1. Амплитудно-фазовая частотная характеристика (рис. 5.4):
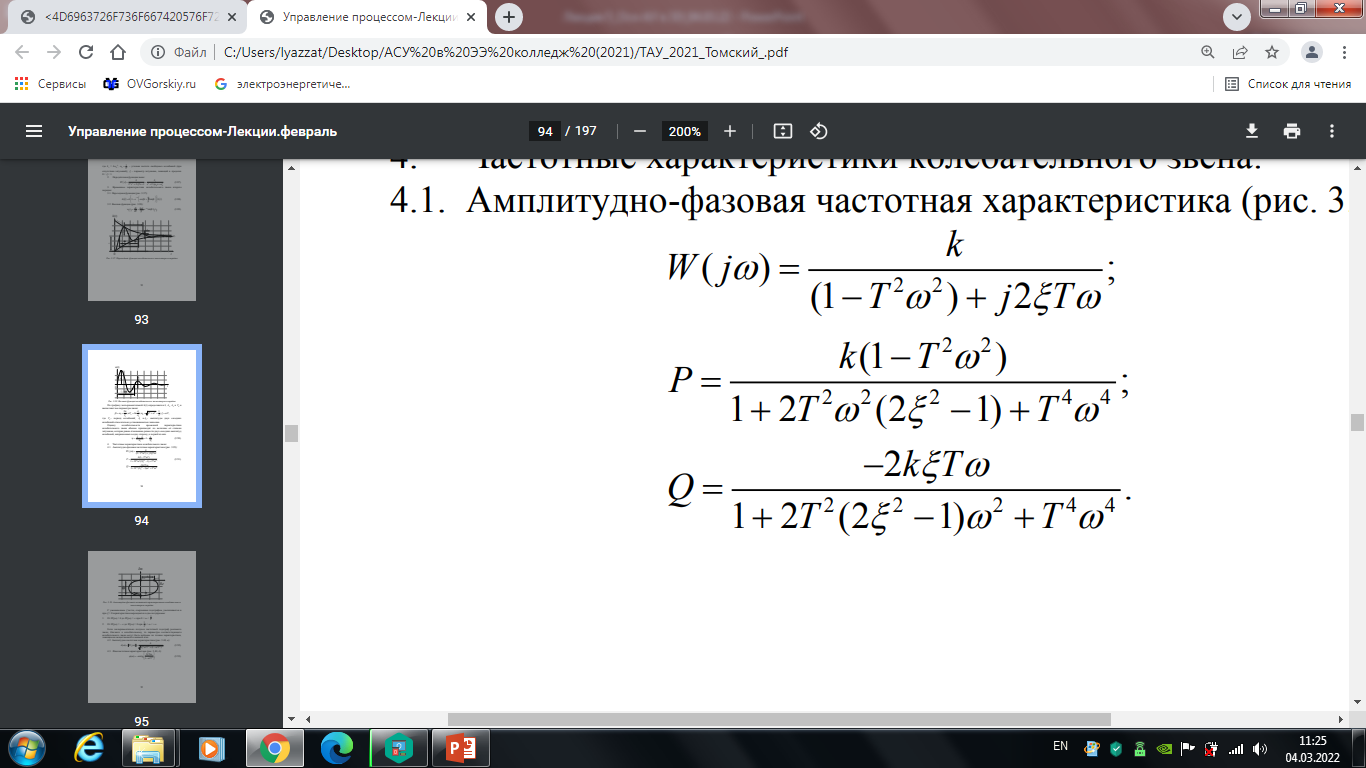
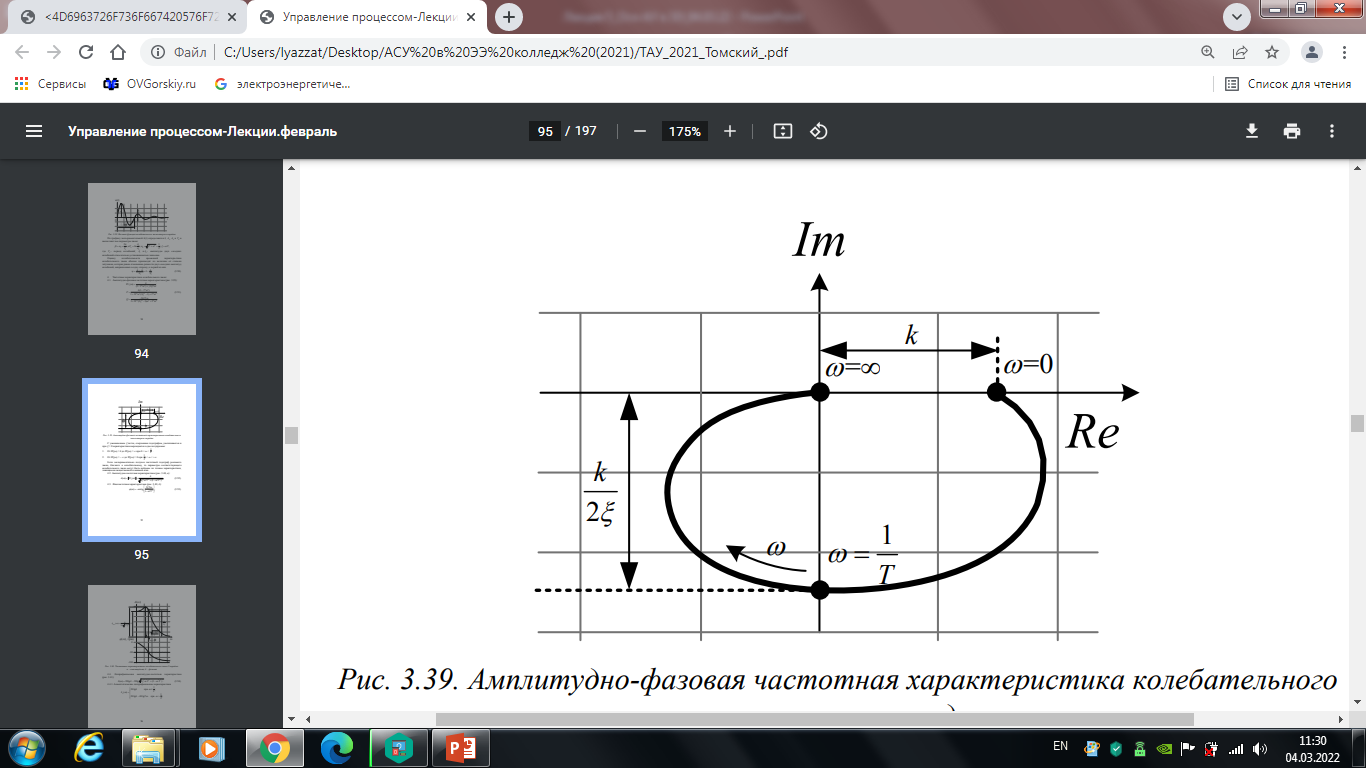
Рис. 5.4. Амплитудно-фазовая частотная характеристика колебательного звена второго порядка
С уменьшением ξ петля, очерченная годографом, увеличивается и
при & = 0 характеристика вырождается в две полупрямые:

Если экспериментально получен частотный годограф реального звена, близкого к колебательному, то параметры соответствующего колебательного звена могут быть найдены по точкам характеристики, лежащим на вещественной и мнимой осях.
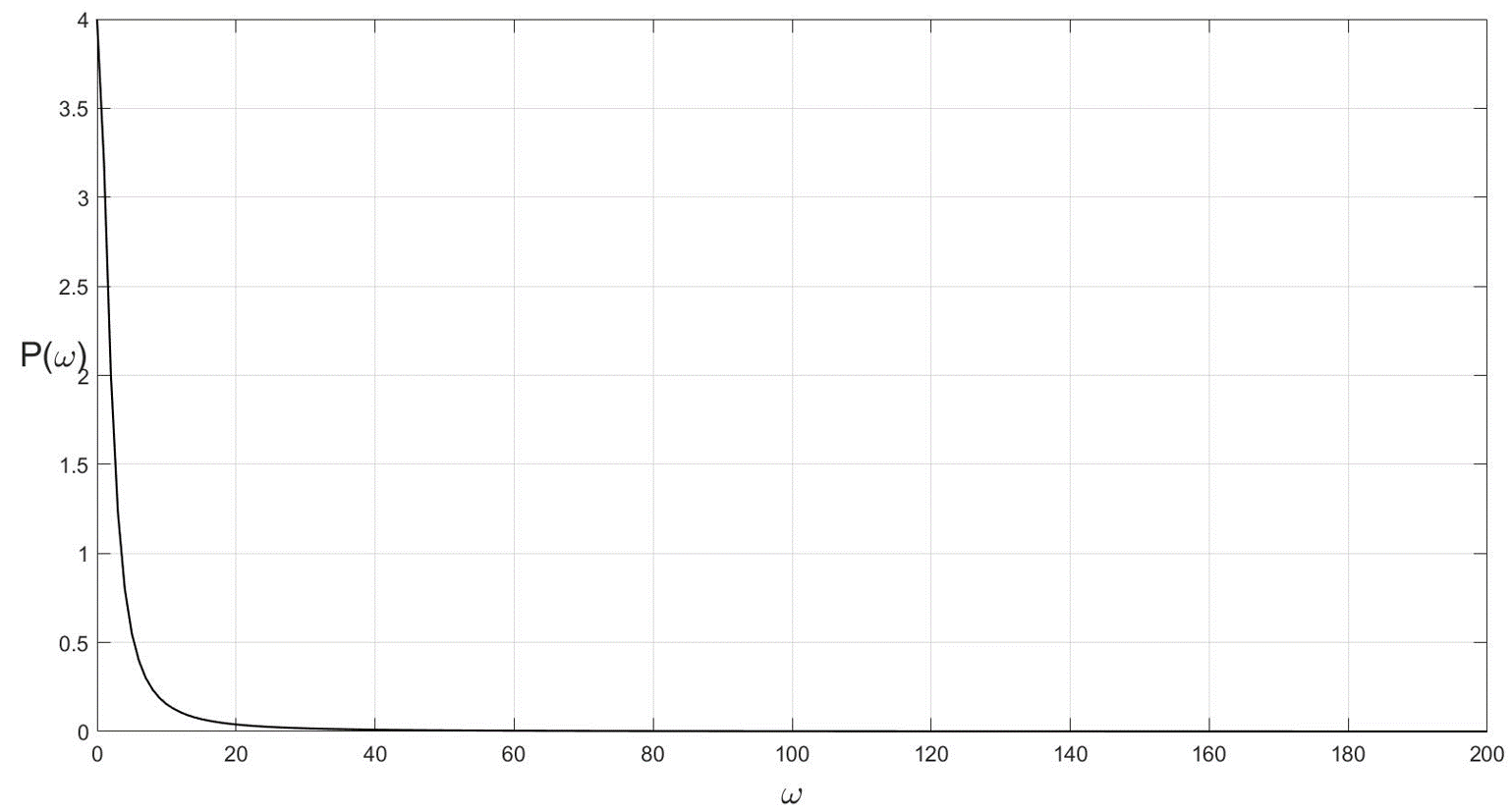
4.2. Амплитудно-частотная характеристика (рис. 5.5, а):

4.3. Фазочастотная характеристика (рис. 3.40, 6):

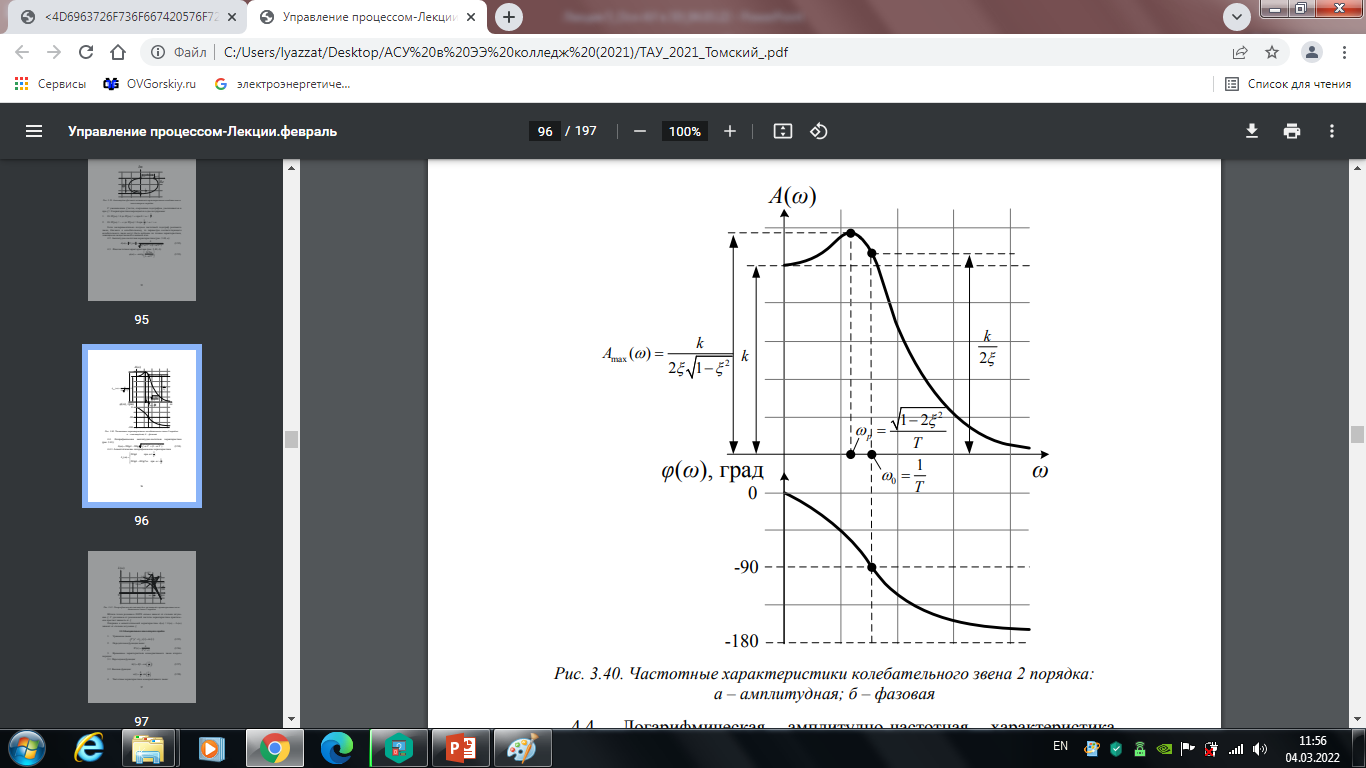
Рис. 5.5. Частотные характеристики колебательного звена 2 порядка: а – амплитудная; б – фазовая
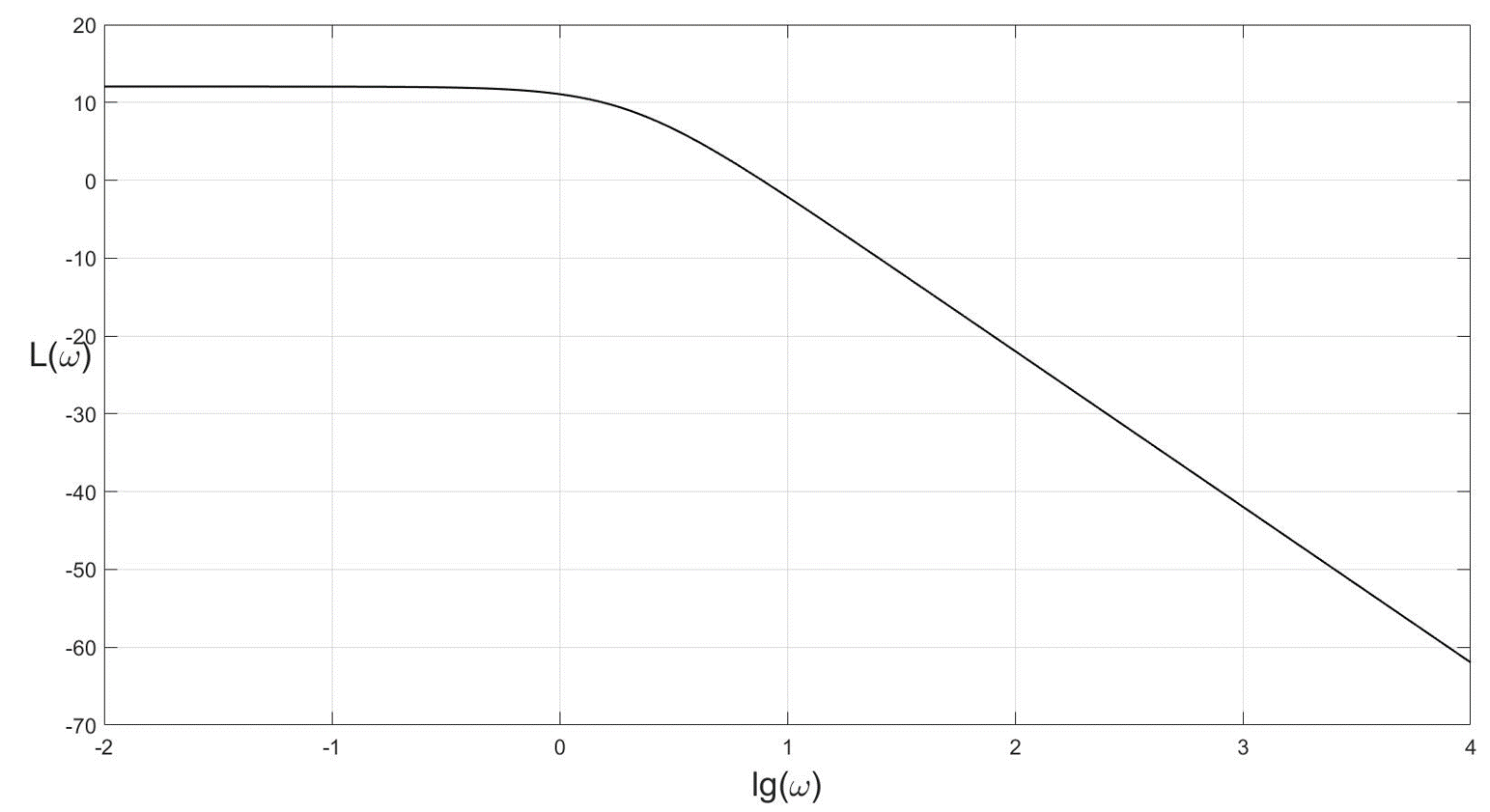
4.4. Логарифмическая амплитудно-частотная характеристика (рис. 5.6):
![]()
4.4.1. Асимптотические логарифмические характеристики

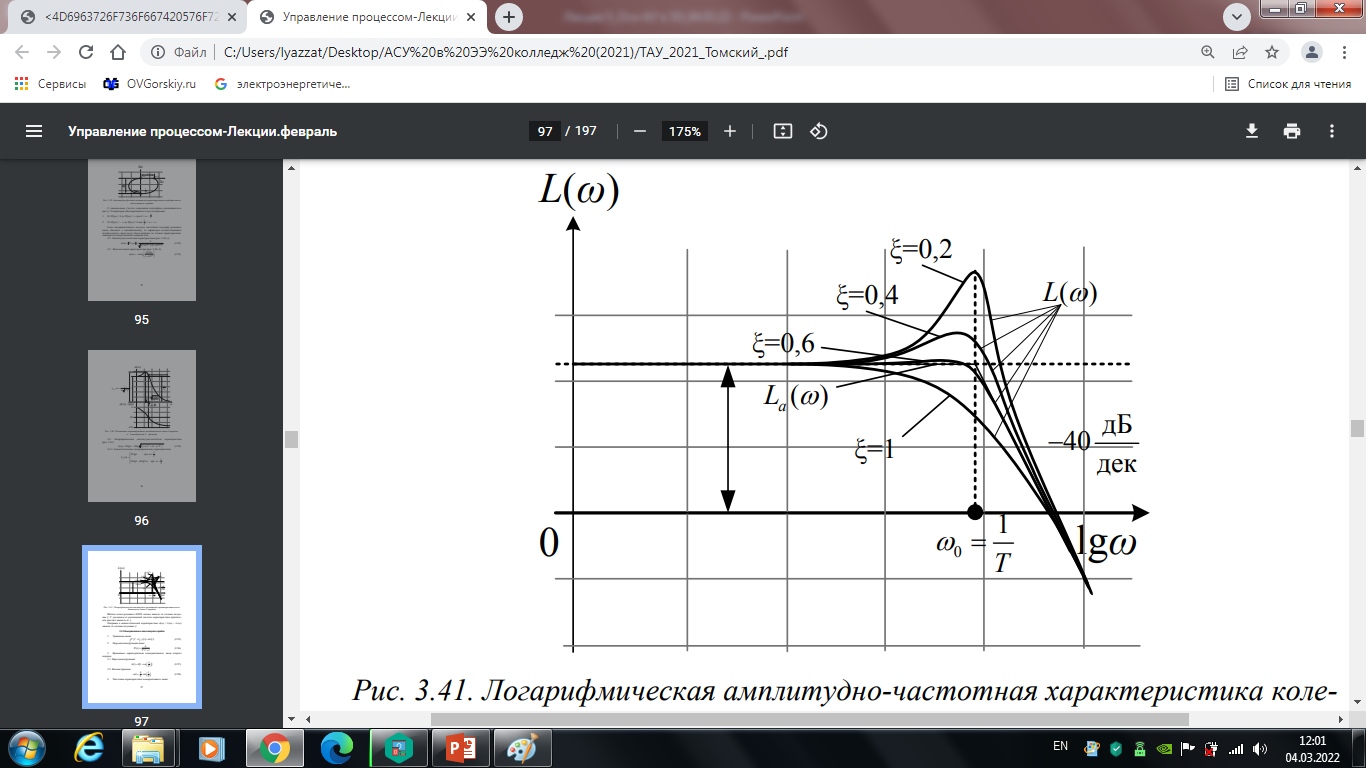
Рис. 5.6. Логарифмическая амплитудно-частотная характеристика колебательного звена 2 порядка
Вблизи точки резонанса ЛАЧХ сильно
зависит от степени затухания
 .
С удалением от резонансной частоты
характеристика практически перестаёт
зависеть от
.
Поправка к асимптотической характеристике
δ(ω) = L(ω) – La(ω) зависит от степени
затухания
.
С удалением от резонансной частоты
характеристика практически перестаёт
зависеть от
.
Поправка к асимптотической характеристике
δ(ω) = L(ω) – La(ω) зависит от степени
затухания

