11. Линеаризация системы автоматического управления.
Линеаризация уравнения, описывающего динамическое звено
Линеаризацию удобнее производить по звеньям. Допустим, что в звене A выходная величина y является нелинейной функцией одной входной величины x (рис. 2.1 а). При имеем . Пусть входная величина x получила относительно начального значения приращение , так что . Тогда приращение выходной величины
Дифференциал функции y, определяемый как главная часть ее приращения, при данном значении независимой переменной x равен значению производной при этом значении, умноженному на дифференциал независимой переменной:
Тогда для малых
.
Здесь – малая величина более высокого порядка, чем , и которая обычно отбрасывается. В случае необходимости величину погрешности можно оценить, разложив функцию в ряд Тэйлора в окрестности точки .
Рис. 2.1. Нелинейное звено (а) и его статические характеристики (б): АВ – исходная, А′В′ - линеаризованная
Замена точного значения приращения функции её дифференциалом в окрестности принято называть линеаризацией зависимости .
Геометрически линеаризация нелинейной зависимости между переменными x и y (см. рис. 2.1 б) означает замену исходной кривой AB отрезком её касательной в точке , соответствующей заданному режиму, и параллельному переносу начала координат в эту точку.
Для реальных динамических звеньев значительные участки ЛАЧХ с большой точностью могут быть заменены прямыми линиями – асимптотами (Тоже в какой-то мере линеаризация САУ). Тогда ЛАЧХ изображается отрезками прямых (асимптотами) и называется асимптотической ЛАЧХ. При этом асимптоты (отрезки прямых линий) имеют отрицательные и положительные наклоны, кратные 20 дБ/дек (рис. 4.9).
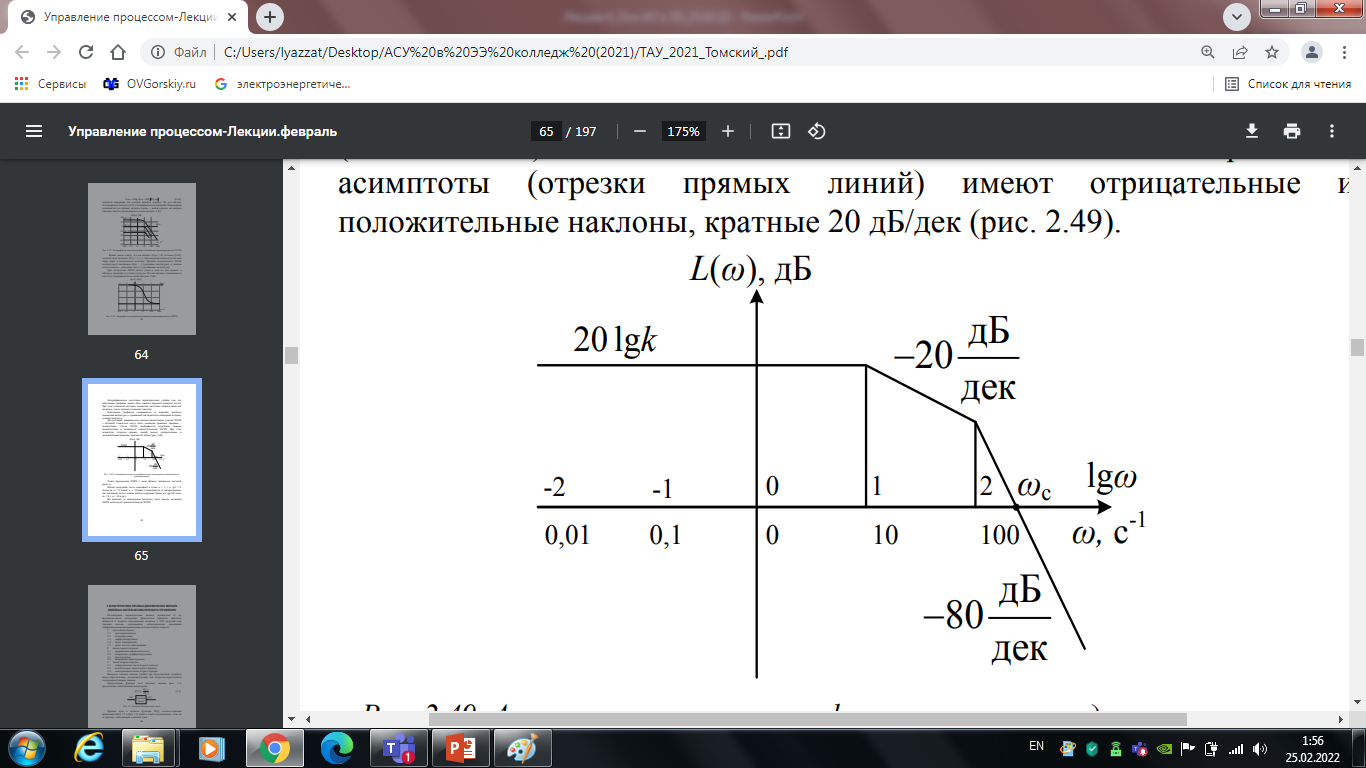
Рис. 4.9. Асимптотическая логарифмическая амплитудно-частотная характеристика
Точка пересечения ЛАЧХ с осью абсцисс называется частотой среза ωс.
Начало координат часто помещают в точке ω = 1, т. к. lg1 = 0. Точка же ω = 0 лежит в -∞. Однако в зависимости от интересующего нас диапазона частот можно начало координат брать и в другой точке (ω = 0,1; ω = 10 и др.).
На практике (в инженерных расчётах) часто вместо истинной ЛАЧХ используют асимптотическую ЛАЧХ.
12. Временные характеристики динамических звеньев сау.
В принципе отсюда надо учить только эту таблицу и всё
Временные характеристики пропорциональных звеньев
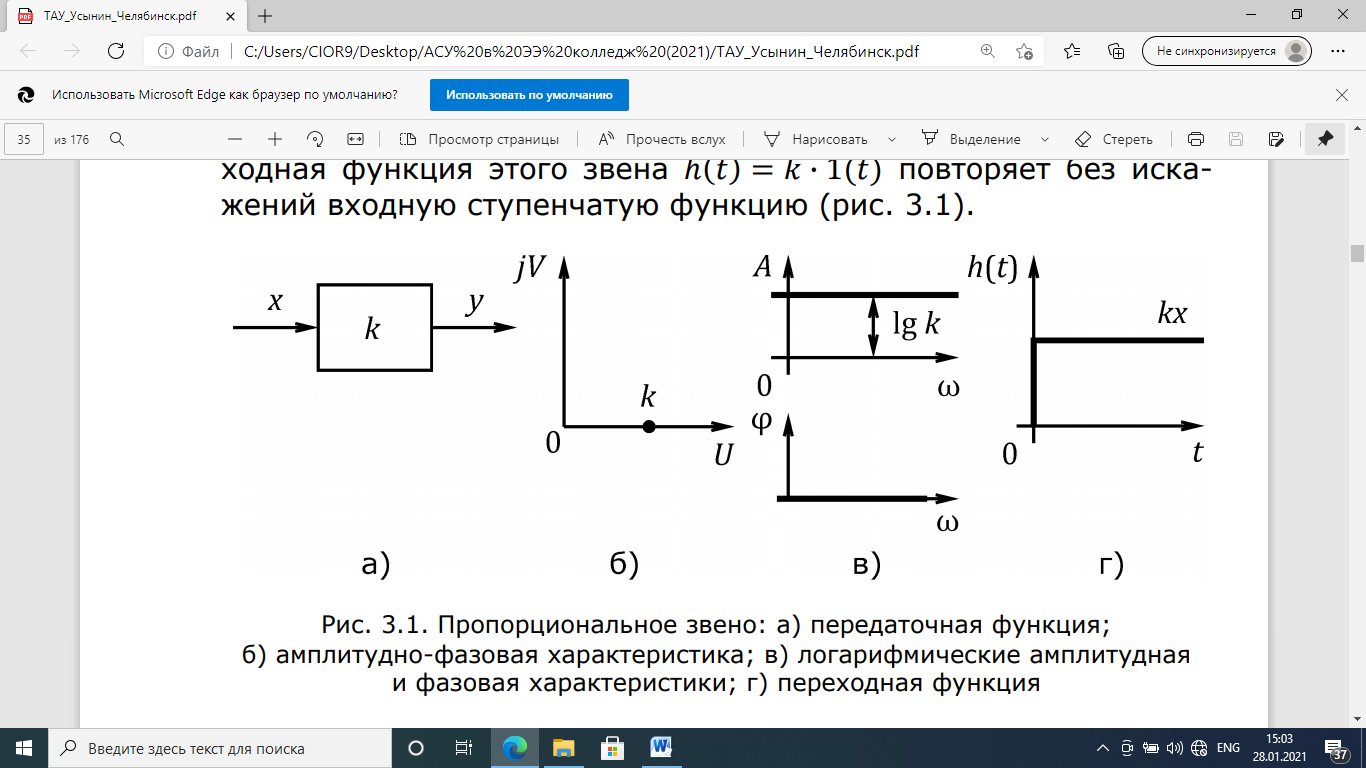
Рис. 3.5. Пропорциональное звено: переходная функция
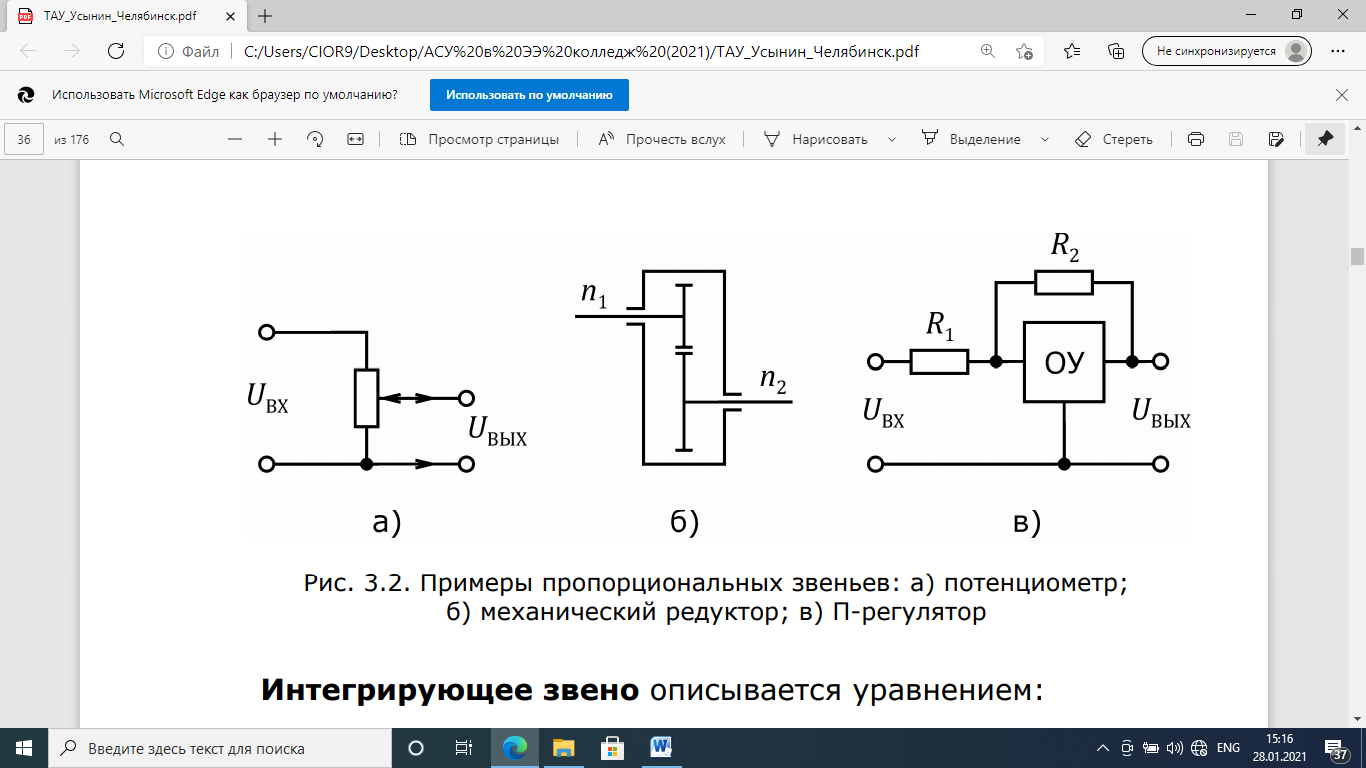
Рис. 3.6. Примеры пропорциональных звеньев:
а) потенциометр;
б) механический редуктор; в) П-регулятор
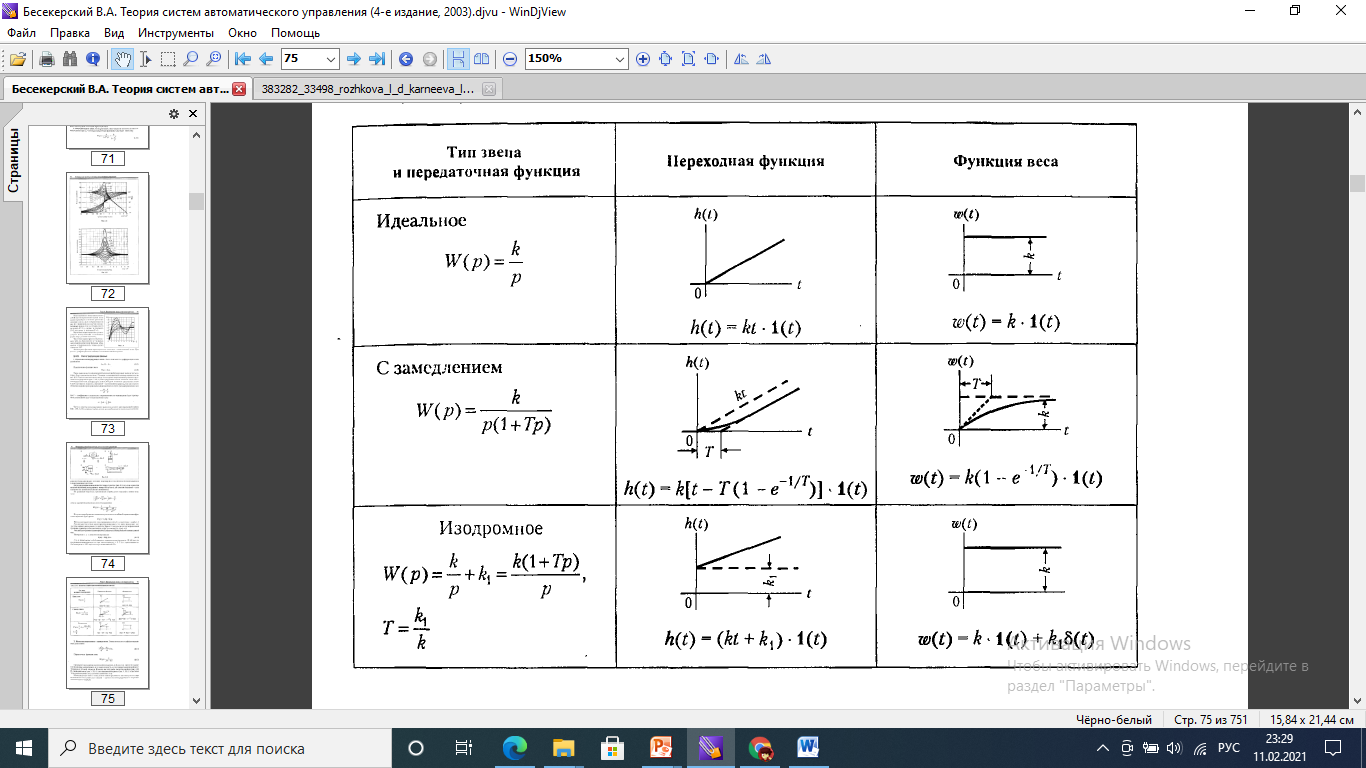
Временные характеристики интегрирующих звеньев
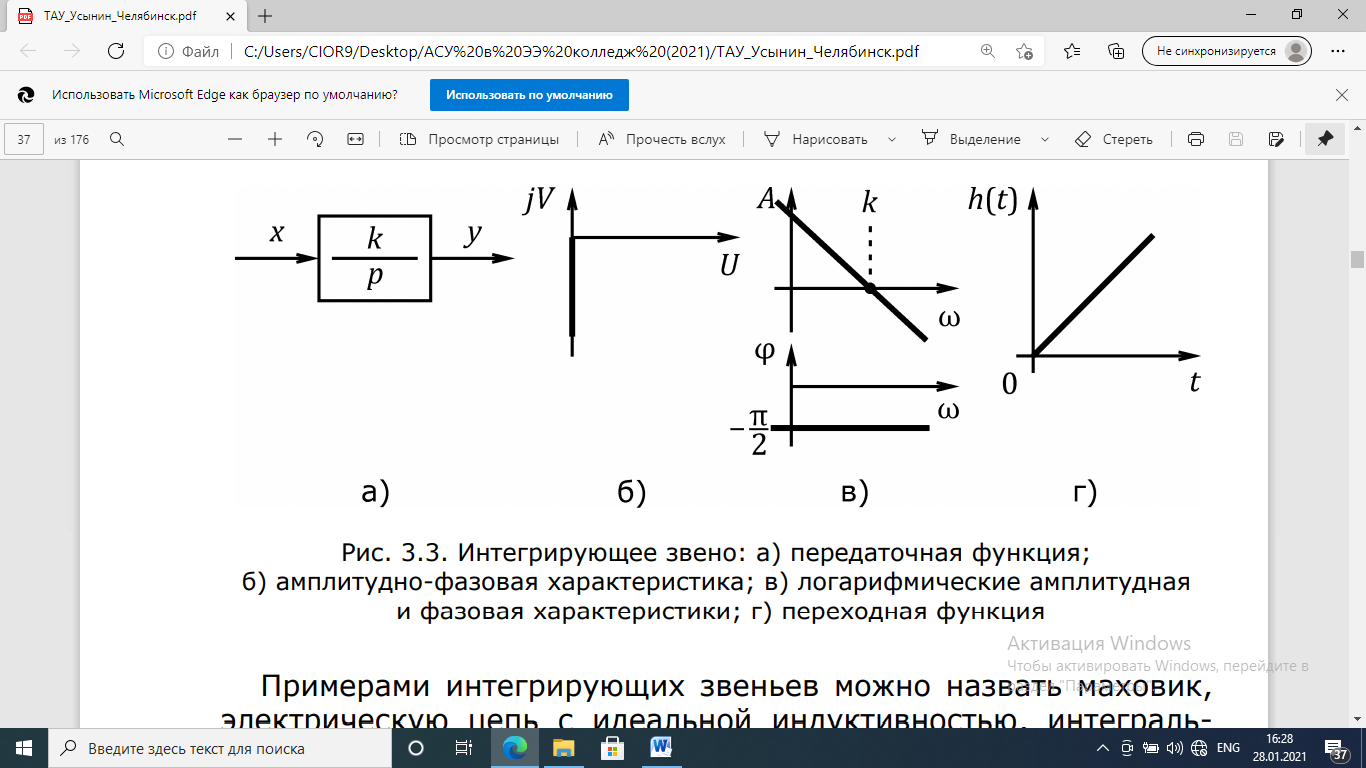
Рис. 3.7. Интегрирующее звено: переходная функция
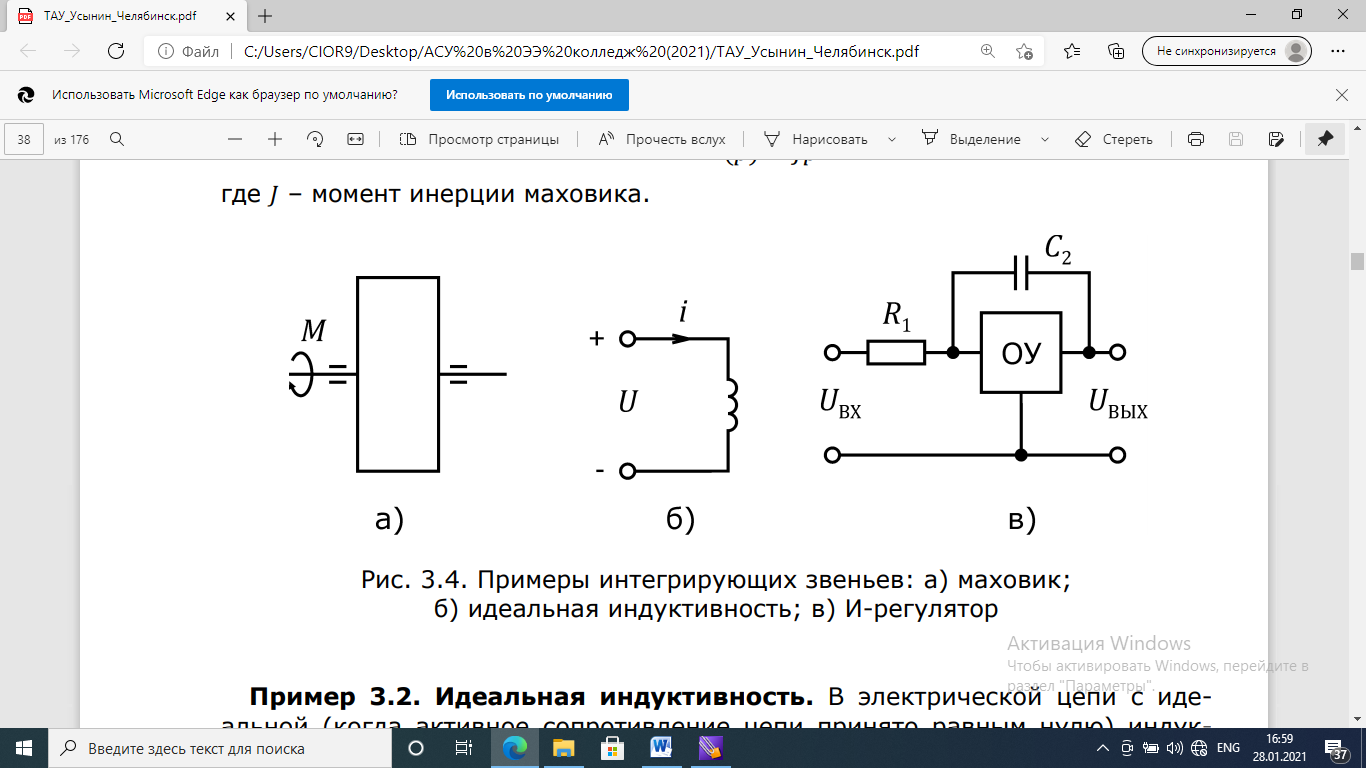
Рис. 3.8. Примеры интегрирующих звеньев:
а) маховик; б) идеальная индуктивность; в) И-регулятор
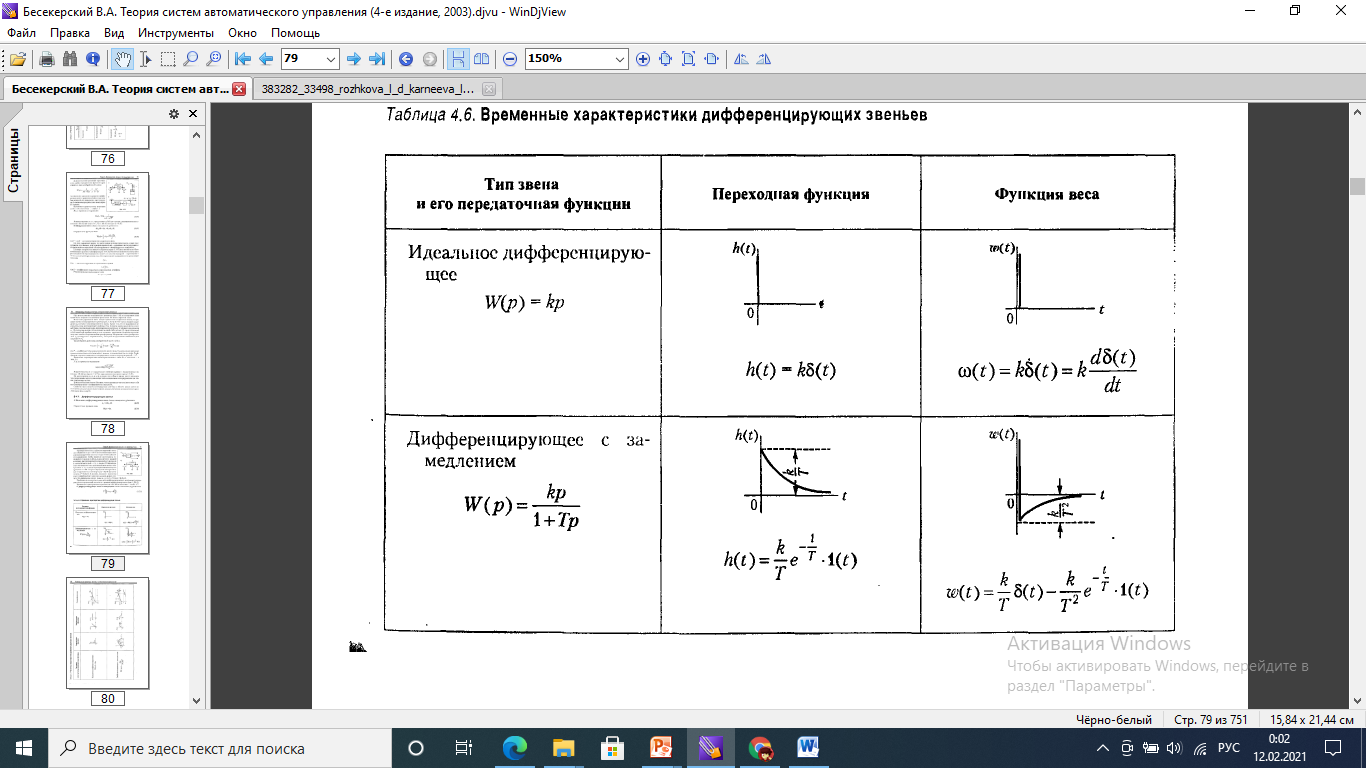
Временные характеристики дифференцирующих звеньев
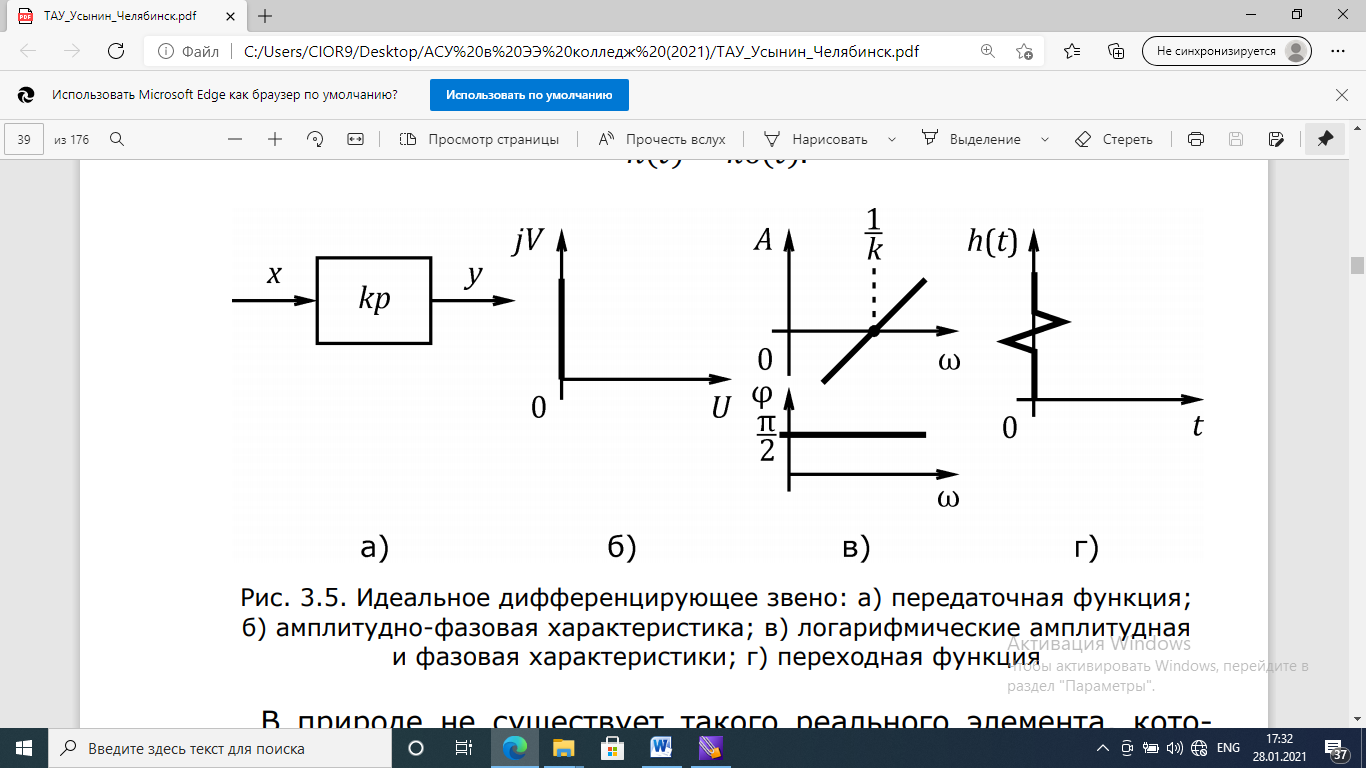
Рис. 3.10. Идеальное дифференцирующее звено: переходная функция
Примеры: идеальный конденсатор, Д-регулятор
13. Частотная передаточная функция и частотные характеристики. Частотные характеристики сау. Частотные характеристики динамического звена
Наряду с математическим описанием (дифференциальные уравнения, передаточные функции, временные характеристики) динамических звеньев и систем автоматического управления в целом в теории автоматического управления для математического описания звеньев и систем широко применяются также частотные характеристики, которые определяют поведение отдельных звеньев и системы в целом при действии на их входе гармонических колебаний.
Частотными характеристиками называются формулы и графики, характеризующие реакцию звена на синусоидальное входное воздействие в установившемся режиме (т. е. вынужденные синусоидальные колебания звена).
Известно,
что гармонические колебания
 ,
(A – амплитуда; φ – фаза; ω – частота
колебаний) описываются периодической
функцией времени
,
(A – амплитуда; φ – фаза; ω – частота
колебаний) описываются периодической
функцией времени
 ,
где
,
где
 – период колебаний; n – любое целое
число.
– период колебаний; n – любое целое
число.
Отличительной
особенностью периодических функций
является то, что они существуют на
бесконечном отрезке времени от
 до
до
 .
С этой точки зрения они являются
математической абстракцией, т. к. любой
реальный процесс имеет начало и конец.
Однако, если реальный процесс длится
достаточно долго с периодическим
повторением предыдущих значений, то
его можно с достаточной точностью
считать периодическим.
.
С этой точки зрения они являются
математической абстракцией, т. к. любой
реальный процесс имеет начало и конец.
Однако, если реальный процесс длится
достаточно долго с периодическим
повторением предыдущих значений, то
его можно с достаточной точностью
считать периодическим.
Таким образом, в реальных условиях реакцией системы на периодические входные воздействия могут считаться только установившиеся колебания выходной величины, т. е. колебания, которые возникают в САУ по истечении достаточно большого времени после начала воздействия.
В этом принципиальное отличие метода частотных характеристик от метода временных характеристик, так как в последнем рассматривается поведение САУ в переходных режимах.
Несмотря на это, как увидим дальше, частотные характеристики также полно определяют поведение во времени управляемой величины, вызванное как периодическими, так и непериодическими воздействиями.
В линейной САУ установившиеся колебания выходной величины, вызванные гармоническими воздействиями на входе, являются гармоническими колебаниями той же частоты, но амплитуда и фаза их будут уже другими.

На вход линейного звена в момент времени подан сигнал, изменяющийся во времени по синусоидальному закону:

где
 – амплитуда входного сигнала; часто
принимают
– амплитуда входного сигнала; часто
принимают

 –
круговая частота колебания
–
круговая частота колебания
 ;
;
 – период колебаний;
– период колебаний;
 –
начальная фаза, обычно принимают
–
начальная фаза, обычно принимают
 .
.
Спустя некоторое время, достаточное
для затухания свободной составляющей
движения, на выходе звена установятся
вынужденные колебания. При этом выходная
переменная будет изменяться тоже по
синусоидальному закону с той же частотой
 ,
но с другой амплитудой
,
но с другой амплитудой
 и сдвинута по фазе относительно входной
синусоиды на угол
и сдвинута по фазе относительно входной
синусоиды на угол
 :
:
 ,
,
Если теперь повторить эксперимент для другого значения частоты , то на выходе будут наблюдаться вынужденные колебания с другой амплитудой и другим фазовым сдвигом .
Изменяя частоту входного сигнала в
диапазоне
 ,
можно получить амплитудную частотную
характеристику (АЧХ) – зависимость
отношения амплитуд выходного и входного
сигналов
,
можно получить амплитудную частотную
характеристику (АЧХ) – зависимость
отношения амплитуд выходного и входного
сигналов
 от частоты – и фазовую частотную
характеристику (ФЧХ)
от частоты – и фазовую частотную
характеристику (ФЧХ)
 – величину фазового сдвига выходной
синусоиды относительно входной.
– величину фазового сдвига выходной
синусоиды относительно входной.
В ряде случаев бывает удобно амплитудную и фазовую частотные характеристики заменить одной – амплитудно-фазовой частотной характеристикой, – которая на комплексной плоскости может быть представлена в показательной форме:
 .
.
По сути
 и
и
 – это параметрические уравнения
переменного от частоты
годографа
вектора
– это параметрические уравнения
переменного от частоты
годографа
вектора
 в полярной системе координат.
в полярной системе координат.
Если уравнение вектора
представить в параметрической форме
в декартовых координатах, то
 ,
,
где P – вещественная частотная характеристика;
– вещественная частотная характеристика;
Q –
мнимая частотная характеристика.
–
мнимая частотная характеристика.
В электрических цепях вещественной
частотной характеристике P соответствует активная составляющая
выходной переменной (тока или напряжения),
а мнимой Q
– реактивная. Очевидна связь между
частотными характеристиками, заданными
в полярной и декартовой системах
координат:
соответствует активная составляющая
выходной переменной (тока или напряжения),
а мнимой Q
– реактивная. Очевидна связь между
частотными характеристиками, заданными
в полярной и декартовой системах
координат:
 и
и
 .
.
Запишем гармонические функции входа и выхода динамического звена в символической (комплексной) форме:
 ;
;
 .
.
И взяв их отношение, получим:
При изменении частоты от 0 до +∞ получаем
комплексную функцию частоты W(jω), которая
называется амплитудно-фазовой частотной
характеристикой динамического звена.
Её модуль
 определяет отношение амплитуд выходных
и входных колебаний при изменении
частоты ω от 0 до +∞. Эта зависимость
отношения амплитуд выходных и входных
гармонических сигналов от частоты
называется амплитудно-частотной
характеристикой (АЧХ) динамического
звена (рис. 4.1).
определяет отношение амплитуд выходных
и входных колебаний при изменении
частоты ω от 0 до +∞. Эта зависимость
отношения амплитуд выходных и входных
гармонических сигналов от частоты
называется амплитудно-частотной
характеристикой (АЧХ) динамического
звена (рис. 4.1).
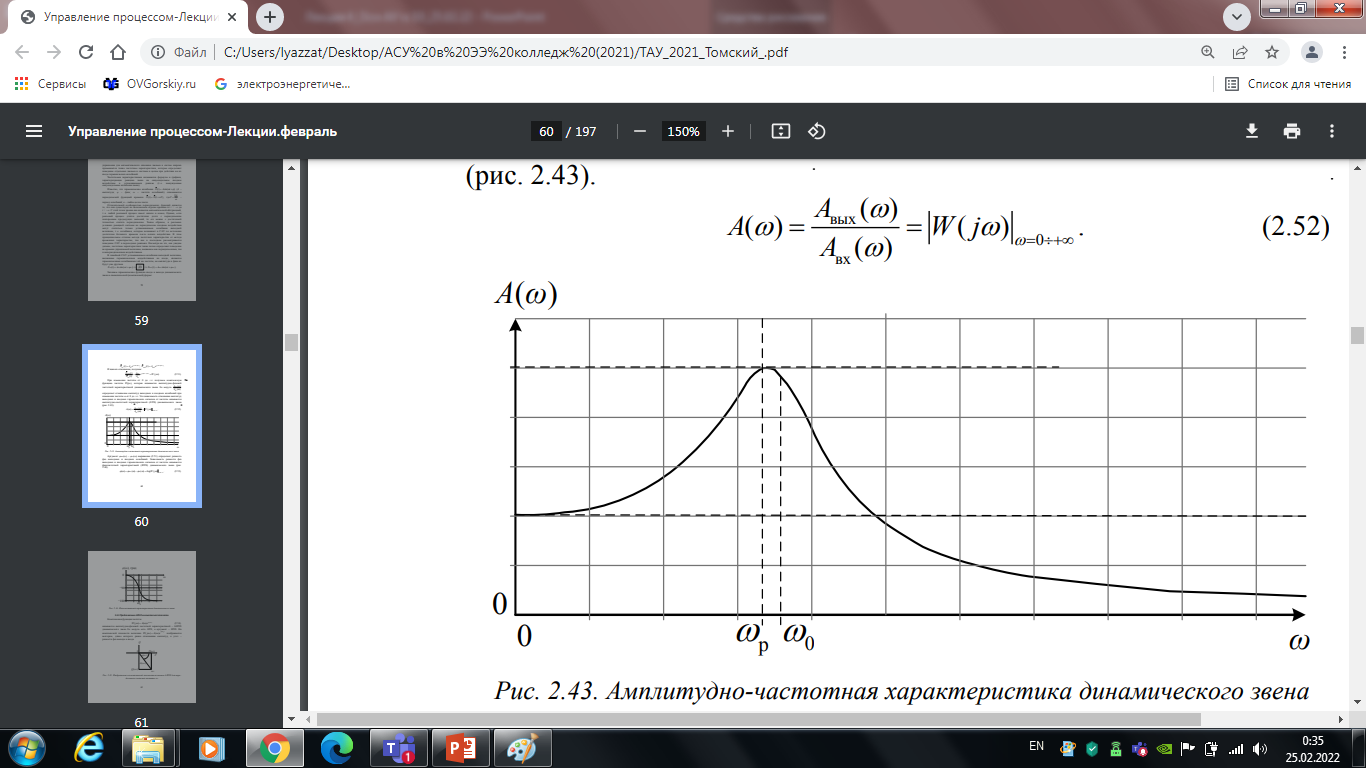
Рис. 4.1. Амплитудно-частотная характеристика динамического звена
Аргумент
 выражения
(4.1) определяет разность фаз выходных и
входных колебаний. Зависимость разности
фаз выходных и входных гармонических
сигналов от частоты называется
фазочастотной характеристикой (ФЧХ)
динамического звена (рис. 4.2).
выражения
(4.1) определяет разность фаз выходных и
входных колебаний. Зависимость разности
фаз выходных и входных гармонических
сигналов от частоты называется
фазочастотной характеристикой (ФЧХ)
динамического звена (рис. 4.2).
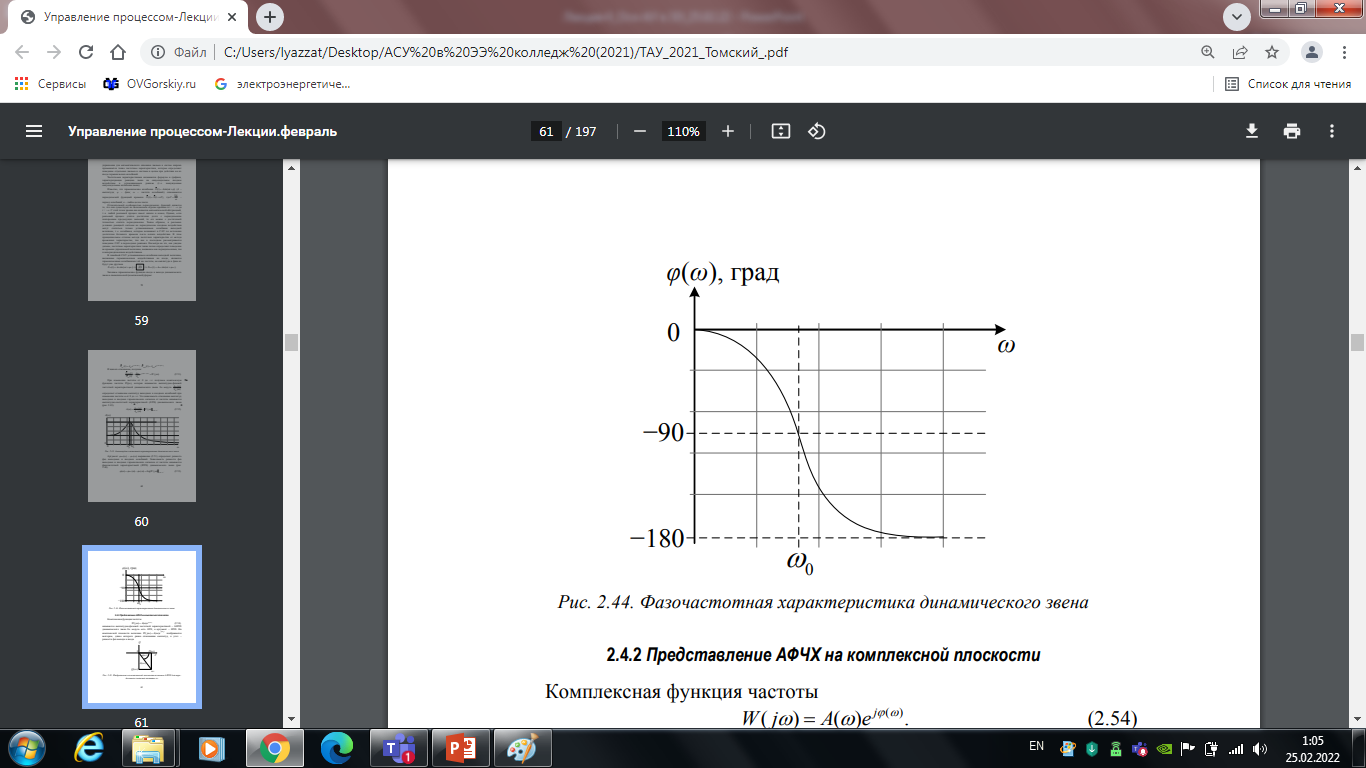
Рис. 4.2. ФЧХ динамического звена
Представление АФЧХ на комплексной плоскости
Комплексная функция частоты
 называется амплитудно-фазовой частотной
характеристикой – АФЧХ динамического
звена, её модуль есть АЧХ, а аргумент –
ФЧХ. На комплексной плоскости
величина
называется амплитудно-фазовой частотной
характеристикой – АФЧХ динамического
звена, её модуль есть АЧХ, а аргумент –
ФЧХ. На комплексной плоскости
величина изображается
вектором, длина которого равна отношению
амплитуд, а угол – разности фаз выхода
и входа.
изображается
вектором, длина которого равна отношению
амплитуд, а угол – разности фаз выхода
и входа.
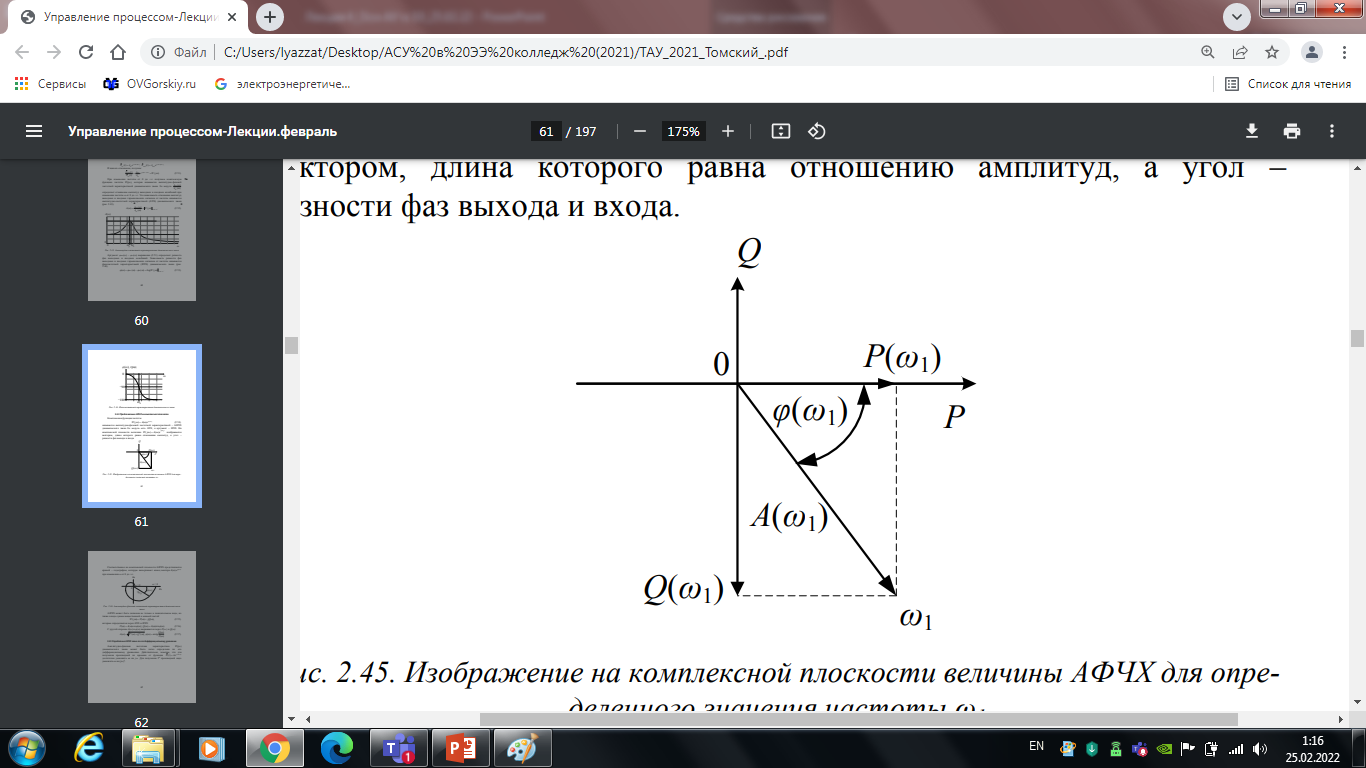
Рис.4.3. Изображение на комплексной плоскости величины АФЧХ для определенного значения частоты ω1
Соответственно на комплексной плоскости
АФЧХ представляется кривой – годографом,
которую вычерчивает конец вектора
 при
изменении ω от 0 до +∞.
при
изменении ω от 0 до +∞.
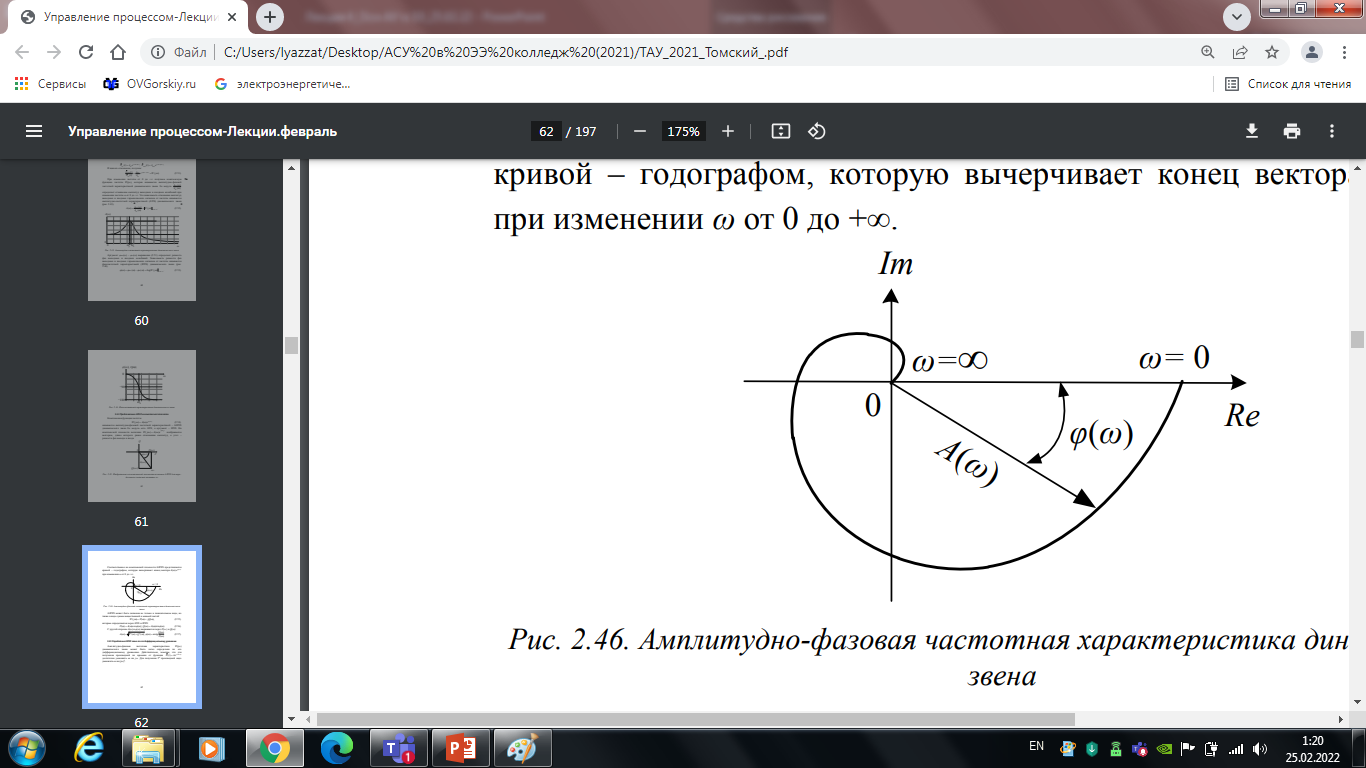
Рис. 4.4. Амплитудно-фазовая частотная характеристика динамического звена
АФЧХ может быть записана не только в показательном виде, но и также в виде суммы вещественной и мнимой частей:
![]()
Которые определяются через АЧХ и ФЧХ: