

10. Перечислите основные виды типовых входных воздействий на систему регулирования.
Типовые входные сигналы и выходные характеристики системы регулирования
Ступенчатая функция. Эта функция в
момент времени
 скачком достигает значения
скачком достигает значения
 и далее остается постоянной (рис. 2.2 а,
кривая 1). Это значит, что
и далее остается постоянной (рис. 2.2 а,
кривая 1). Это значит, что
 при
при
 и
и
 при
при
 . Когда
. Когда
 ,
имеем единичную ступенчатую функцию,
которую обозначают
,
имеем единичную ступенчатую функцию,
которую обозначают

Для электрических и электромеханических систем и устройств ступенчатый сигнал означает обычно включение постоянного напряжения на вход системы. Некоторые другие воздействия, например приложение момента статической нагрузки, колебания напряжения в сети, питающей электропривод, также удобно рассматривать в виде ступенчатой функции.
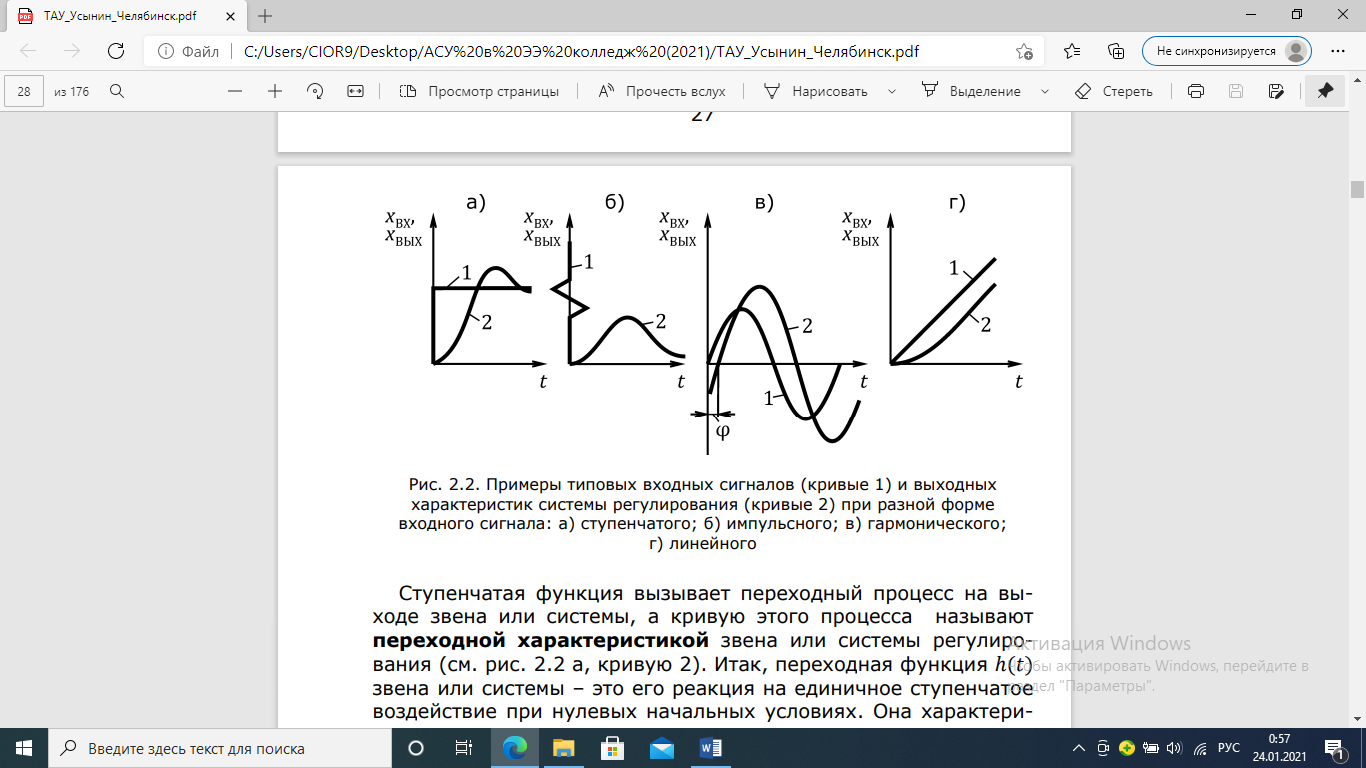
Рис. 2.2. Примеры типовых входных сигналов (кривые 1) и выходных характеристик системы регулирования (кривые 2) при разной форме входного сигнала: а) ступенчатого; б) импульсного; в) гармонического; г) линейного
Ступенчатая функция вызывает переходный процесс на выходе звена или системы, а кривую этого процесса называют переходной характеристикой звена или системы регулирования (см. рис. 2.2 а, кривую 2).
Итак, переходная функция
 звена или системы – это его реакция на
единичное ступенчатое воздействие при
нулевых начальных условиях. Она
характеризует переход системы от одного
установившегося режима к другому.
звена или системы – это его реакция на
единичное ступенчатое воздействие при
нулевых начальных условиях. Она
характеризует переход системы от одного
установившегося режима к другому.
Для определения переходной функции
линейной системы регулирования необходимо
решить неоднородное уравнение системы
при
,
которое имеет две составляющие:
вынужденную
 и свободную
и свободную
 .
Вынужденная составляющая
представляет собой частное решение
исходного дифференциального уравнения
и для статических элементов находится
непосредственно из уравнения (2.2), если
в нем положить
.
Вынужденная составляющая
представляет собой частное решение
исходного дифференциального уравнения
и для статических элементов находится
непосредственно из уравнения (2.2), если
в нем положить
 :
:
 .
.
Свободная составляющая может быть найдена (при отсутствии кратных корней) как решение однородного дифференциального уравнения

де
 – корни характеристического уравнения,
– корни характеристического уравнения,
 – постоянные интегрирования.
– постоянные интегрирования.
Импульсная функция. Эту функцию обозначают
 ,
,
где A – постоянная, а
 – импульс бесконечно большой величины
и бесконечно малой длительности (см.
рис. 2.2. б), так что
– импульс бесконечно большой величины
и бесконечно малой длительности (см.
рис. 2.2. б), так что

Импульсную функцию
 можно рассматривать как предел
прямоугольного импульса высоты h
и длительности
можно рассматривать как предел
прямоугольного импульса высоты h
и длительности
 ,
когда
,
когда
 и
и
 ,
но при этом остается
,
но при этом остается
 .
.
На практике примерами кратковременных импульсных воздействий могут быть удары в механических системах, сила отдачи при выстреле из орудия.
Реакция системы на импульсную функцию при нулевых начальных условиях носит название импульсной переходной функции. Иногда её называют импульсной характеристикой, а также весовой функцией системы. График импульсной переходной функции называют импульсной переходной характеристикой. А ещё это блин весовая характеристика, хотя она об этом не говорила, но это знать надо.
Синусоидальная (гармоническая) функция времени
Эту функцию задают в виде синусоидального сигнала частоты ω и амплитуды AВХ (см. рис. 2.2 в).
При анализе конкретных систем регулирования рассматривают лишь вынужденную составляющую движения, когда выходная переменная изменяется также по синусоидальному закону с той же частотой ω, но с другой амплитудой AВЫХ и сдвинута по фазе относительно входной синусоиды на угол φ.
Линейная функция времени. Эта функция (см. рис. 2.2 г) описывается уравнением
 ,
,
где A – постоянная величина.
Когда линейная функция используется для изучения процессов в системе регулирования, то рассматривается только вынужденная составляющая движения. Этот вид воздействия чаще всего используется в следящих электроприводах, например, станков с числовым программным управлением.