

Учебники 80209
.pdf
|
|
|
|
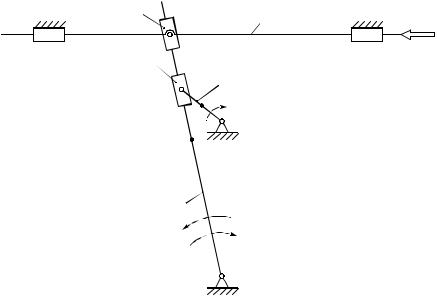
ЗАДАНИЕ 5 |
|
|
|
|
|||
|
|
|
D |
|
|
|
|
|
|
|
|
А |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
B |
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
||
|
L |
|
|
E |
|
|
|
|
N |
|
_ |
|
|
|
|
|
|
|
|
|
РПС |
||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
Рисунок 5 |
|
|
|
|
|
||
Таблица 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Варианты |
|
|
|
|
|
||
|
1 |
2 |
3 |
4 |
5 |
|
6 |
7 |
8 |
9 |
10 |
K |
1,4 |
1,5 |
1,35 |
1,25 |
1,3 |
|
1,3 |
1,4 |
1,5 |
1,35 |
1,45 |
H, мм |
120 |
100 |
105 |
110 |
115 |
|
95 |
110 |
70 |
110 |
80 |
n, |
400 |
500 |
530 |
550 |
560 |
450 |
210 |
250 |
420 |
240 |
|
об/мин |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Pпс |
600 |
700 |
750 |
650 |
500 |
|
650 |
800 |
900 |
720 |
700 |
, |
|
|
|
|
60–70 |
|
|
|
|
||
|
|
|
|
ldc =0,8 lde |
|
|
|
|
|
||
19
3 Порядок выполнения курсового проекта
3.1 Метрический синтез, структурный и кинематический анализ
плоского рычажного механизма (лист 1 графической части)
В качестве исходных данных для выполнения этого этапа приняты:
структурная схема механизма;расстояние между крайними положениями выходного
звена (H мм);
коэффициент изменения средней скорости ведомого звена (k);
угол 1, определяющий положение ведущего звена, для которого проводится кинематический и силовой анализ механизма;
скорость вращения ведущего звена (n, об/мин).
1.1.По заданным исходным параметрам провести метрический синтез плоского рычажного механизма, определив размеры всех звеньев.
1.2.Начало рабочего хода соответствует одному из крайних положений выходного звена, при котором сила полезного сопротивления направлена против его скорости. Изобразить 12 совмещенных положений механизма, поворачивая ве-
дущее звено в заданном направлении ( 1) на углы, кратные 30 ; если при этом второе крайнее положение не совпадает ни с одним из 12, построить это положение дополнительно. Нумерация положений механизма производится, начиная с крайнего, в направлении заданной угловой скорости 1, Положение механизма, соответствующее заданному углу 1, изображается основными линиями, остальные – тонкими. Звенья механизма пронумеровать, кинематические пары обозначить заглавными буквами латинского алфавита.
1.3. Провести структурный анализ рычажного механизма, разложив его на начальный механизм и структурные груп-
20
пы. Составить формулу строения механизма и определить по ней класс механизма.
1.4.Для положения механизма, определяемого углом 1, провести кинематический анализ, построив планы скоростей и ускорений.
1.5.Определить для каждого из 12 положений механизма величину уравновешивающей силы Pу с помощью теоремы Жуковского Н.Е. При этом учитывать силы тяжести звеньев, силу полезного сопротивления и уравновешивающую силу. Уравновешивающую силу прикладывать перпендикулярно к ведущему звену в точке В. При определении сил тяжести учитывать, что центры тяжести звеньев находятся на середине их длин, центр тяжести ползуна совпадает с центром шарнира.
Масса звеньев определяется по формуле: m=q l, где q=20 кг/м (масса, приходящаяся на 1 метр длины звена). Масса ползуна механизма в пять раз превосходит массу предыдущего стержневого звена, массами камней пренебречь. Выбрать из полученных значений уравновешивающей силы максимальное, которое затем использовать для вычисления уравновешивающего момента при проектировании привода рычажного механизма.
3.2 Силовой анализ рычажного механизма (лист 2 графической части)
2.1.Силовой анализ механизма проводить для положе-
ния, определяемого углом поворота кривошипа 1, При расчетах учитывать силы тяжести звеньев, силу полезного сопротивления Pпс и уравновешивающую силу, которую следует приложить перпендикулярно к ведущему звену в точке В. Силовой анализ начинается с последней структурной группы рассматриваемого механизма.
2.2.Изобразить последнюю структурную группу, приложить заданные силы и искомые реакции в кинематических парах. В поступательной кинематической паре приложить реакцию, перпендикулярно направлению возможного перемещения, в связи с тем, что мы пренебрегаем силами трения. Во вращательной паре приложить две взаимно перпендикулярных
21
реакции, одну из которых направить вдоль звена. Записать соответствующие уравнения равновесия статики и определить неизвестные реакции. Для определения некоторых реакций можно воспользоваться построением плана сил рассматриваемой структурной группы. После определения всех неизвестных реакций данной структурной группы, необходимо провести силовой анализ предпоследней структурной группы, при этом в месте их соединения приложить силу, равную по модулю найденной реакции, но противоположного направления.
2.3.Провести силовой анализ начального звена механизма, приложив к нему в кинематической паре В силу, равную реакции, найденной из силового анализа предпоследней структурной группы, и направленную противоположно ей. Кроме этого, в точке В приложить уравновешивающую силу, перпендикулярную начальному звену. В кинематической паре А начального звена приложить реакцию со стороны стойки, первоначально не известную по модулю и направлению. Составить уравнение равновесия начального звена в виде суммы моментов всех сил относительно точки А и определить из него модуль уравновешивающей силы Pу. Затем, построив план сил начального звена, определить направление и величину реакции со стороны стойки.
2.4.Проверить найденную уравновешивающую силу по-
строением «жесткого рычага» Жуковского Н.Е. Найденное значение уравновешивающей силы Pу* не должно отличаться от силы Pу, определенной при силовом анализе более, чем на
10%.
3.3Проектирование привода рычажного механизма
(лист 3 графической части)
3.1.По найденному максимальному значению уравновешивающей силы, приложенной к кривошипу, определить вращающий момент на входном валу привода.
3.2.Выбрать КПД элементов привода и определить общий КПД привода, равный произведению частных КПД передач, входящих в привод.
22
3.3.Определить мощность на валу электродвигателя.
3.4.Произвести кинематический расчет привода и выбрать электродвигатель.
3.5.Определить крутящие моменты, частоты вращения всех валов привода.
3.6.Выбрать материал и термообработку для зубчатых колес редуктора. Определить допускаемые напряжения для зубчатых колес.
3.7.Определить геометрические размеры зубчатой передачи редуктора.
3.8.Произвести предварительный расчет диаметров валов редуктора.
3.9.Рассчитать основные элементы корпуса редуктора.
3.10.Выполнить сборочный чертеж редуктора.
3.11.Произвести технико-экономическое обоснование разработанной конструкции.
23

4 Пример выполнения листа 1 графической части курсового проекта
Согласно заданному варианту имеем следующие начальные условия:
к=1,6
Н = 100 мм
n1 = 490 об/мин РПС=500 Н
4.1 Метрический синтез механизма
Размеры механизма определим для заданного коэффициента к=1,6
Ψ=((1,6-1)/(1,6+1)) 180º=41,54º
R=H/(2sinψ/2)=100/(2sin (41,54/2))=141,0мм
СМ=(Н/2)ctgψ/2=(100/2)ctg(41,54/2)=131,8мм
|
|
H |
ctg |
|
|
|
|
100 |
ctg |
41.54 |
20 |
|
|||||
|
2 |
|
|
|
|
|
|
||||||||||
a |
2 |
|
|
|
|
2 |
2 |
|
|
82.8 |
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
1 sin |
|
|
|
|
1 sin |
41.54 |
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
2 |
|
|
|
||||||
r asin 82.8sin11.74 29.4мм 2
Примем масштабный коэффициент схемы μl =0,001 м/мм, что соответствует чертёжному масштабу М1:1 Построим план механизма в выбранном масштабе.
24
L |
4 |
|
E |
_ |
|
D |
|
5 |
РПС |
|
2 |
|
1 |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
А |
|
|
|
|
|
|
|
|
S |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
Рисунок 6 – План механизма
4.2 Структурный анализ механизма
Определим число степеней свободы
W=3n – 2p5= 3 5 – 2 7=1,
где n – количество подвижных звеньев, р5 – число кинематических пар пятого класса.
Механизм обладает одной степенью свободы. Таким же должно быть число степеней свободы системы, с которой начинается образование механизма. В эту систему должны входить стойка и одно из звеньев, связанных с ней одноподвижной кинематической парой. Примем в качестве такого звена кривошип, так как на него действует внешняя нагрузка - движущий момент Мд.
Схема образования механизма из групп Ассура представлена на рисунке 7.
25
Из формулы строения устанавливаем, что механизм второго класса, так как наивысший класс структурной группы второй.
4.3Кинематический анализ механизма
4.3.1Построение плана скоростей Определим угловую скорость первого звена:
ω1=πn1/30=3,14 490/30=51,3 с-1.
Определим скорость точки В1 равную скорости точки В2
VB1 1lAB 51,3 0,0294 1,5 м/ с.
Из полюса pi плана скоростей для i-того (заданно по ус-
ловию третье положение механизма) положения механизма отложим отрезок
 pib1
pib1 75мм.
75мм.
Масштаб плана скоростей
v VB1 / pib1
pib1  1,5/ 75 0,02 мс 1 / мм.
1,5/ 75 0,02 мс 1 / мм.
Скорость точки В1 принадлежащей кривошипу, складывается из переносной скорости В3 и относительной скорости В23, Чтобы определить скорость точки В3 проводим из полюса Рi плана скоростей луч, перпендикулярный кулисе в данном положении механизма. Из точки b1 опускаем перпендикуляр на этот луч, точка их пересечения будет точкой b3
VB3  pib3
pib3  v ,
v ,
VB2B3  b1b3
b1b3  v .
v .
Скорость точки D3, принадлежащей кулисе, является переносной скоростью, абсолютной скоростью является скорость точки D5, которая определяется зависимостью:
26

VD5 VD3 VD4D3
Точка d3 |
будет |
|
лежать |
на |
луче |
pib3 , расстояние |
|||||
pid3 определим по формуле: |
|
|
|
|
|||||||
|
|
|
p d |
|
|
CD |
|
p b |
|
||
|
|
|
|
|
|
||||||
|
|
|
|
i |
3 |
|
CB |
i 3 |
|
||
Проводим из полюса горизонтально луч и восстанавлива- |
|||||||||||
ем перпендикуляр к лучу |
pid3 |
. В точке пересечения луча и |
|||||||||
перпендикуляра получаем точку d5 (рисунок 8). |
|||||||||||
4.3.2 Построение плана ускорений |
|||||||||||
Ускорение точки B1: |
|
|
|
|
|
|
|
||||
aB |
aBn |
aB |
|
|
|
|
|
|
|
|
|
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
an |
2 |
l |
AB |
51,32 |
0,0374 98,4 м/с2 |
||||||
B |
1ср |
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
Посколькуугловое ускорение первого звена равно нулю, то |
|||||||||||
|
|
|
|
aB 1 lAB 0 |
|
||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
Масштаб плана ускорений: |
|
|
|||||||||
a aBn /150 98,4/150 0,656 |
мс 2 / мм |
||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
aB1 aB3 aB2B3 aкор
aB3 aBn3 aB3
Кориолисово ускорение:
|
|
aкор |
2 3 |
VB B . |
|
|
|||
|
|
|
|
|
|
2 |
3 |
|
|
Угловая скорость звена 3: |
|
|
|
|
|||||
3 |
|
VD3 v |
|
|
106,7 0,016 |
7,05с |
1 |
||
lAB |
0,242 |
|
|
||||||
|
|
|
|
|
|
||||
Кориолисово ускорение
27

aкор |
2 7,05 23 0,016 5,2 м / с2 . |
|||
aBn |
|
VB2 |
97 0,016 2 |
|
|
3 |
|
11м / с2 . |
|
|
||||
3 |
|
lBC |
0,219 |
|
При построении плана ускорений находим направление углового ускорения третьего звена ε3 – по часовой стрелке.
Определяем ускорение точки D3 принадлежащей кулисе:
|
|
|
|
|
CD |
|
|
d3 |
, |
|
|
|
|
|
|
CB |
|
b3 |
|||
|
|
|
|
|
|
|
|
|||
d |
|
|
CD |
b |
|
|
242 |
27 29,7 мм |
||
|
|
220 |
||||||||
|
3 |
|
CB 3 |
|
|
|
||||
Угловое ускорение третьего звена:
3 aB3 5,75 26,1с 1 lBC 0,22
4.3.3 Определение наибольшей уравновешивающей силы за полный оборот ведущего звена механизма.
Вычерчиваются двенадцать совмещенных положений механизма, соответствующих последовательному повороту ведущего звена АВ на 30 в заданном направлении АВ ( 1).
Строятся 12 повернутых на 90 планов скоростей механизма, к которым в соответствующих изображающих точках прикладываются заданные силы и уравновешивающая сила, определяемая из уравнения равновесия повернутого плана скоростей в виде суммы моментов сил относительно полюса плана. Наибольшее значение уравновешивающей силы используется для проектирования привода рычажного механизма при выборе электродвигателя. При построении следует учитывать, что сила полезного сопротивления РПС действует только при рабочем ходе механизма, на холостом ходу и в крайних положениях механизма при рабочем ходе она равна нулю.
28