

6. Расчет механизма регулирования разгрузочной щели щековой дробилки
На распорную плиту действует составляющая силы тяжести Gщ подвижной щеки Рпр (рис. 6.1).

Рис. 6.1. Схема сил, действующих на распорную плиту и подвижную щеку
Сила тяжести щеки Gщ = 12кН. Рассчитаем усилие, действующее на ползун при уменьшении разгрузочной щели, которое складывается из усилия замыкающей пружины и усилия, необходимого для поворота щеки. Определим значения сил, действующих в винтовом механизме.
Для данной дробилки при практических расчетах в качестве замыкающей пружины можно использовать пружины №93 – №103, силы которых при максимальной деформации находятся в пределах 13 – 14,7 кН.
Примем предельное усилие Рпр замыкающей пружины равным 15 кН (с учётом запаса и смыкания витков).
Для определения части усилия, необходимой для поворота щеки, рассмотрим равновесие системы сил, действующих на подвижную щеку и распорную плиту (рис. 6.1) :

Определим значения a и b:


Составляющая силы тяжести щеки:

Схема сил, действующих в механизме регулирования, представлена на рис. 6.2.
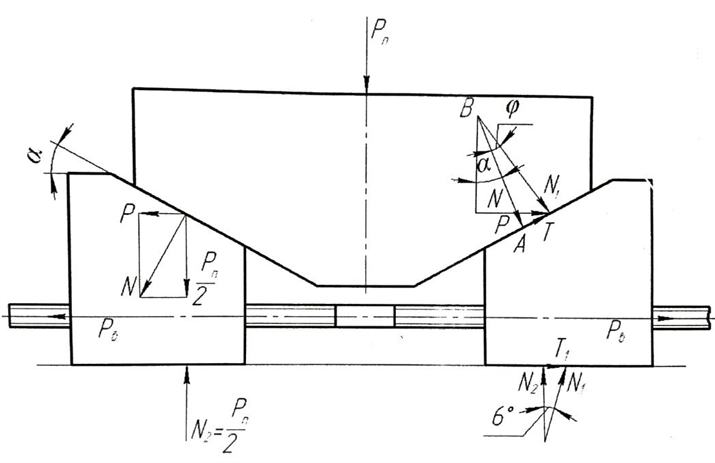
Рис. 6.2. Расчетная схема механизма регулирования
разгрузочной щели
Сила, действующая на ползун (рис 6.2) :

Здесь при расчете не учтены возможные сопротивления: трение в сухарях и подшипниках эксцентрикового вала, загрязнение клинового механизма и прочее, поэтому с запасом примем Рп = 19 кН.
Нормальное давление N на клин в соответствии с рис. 6.2 равно :

Угол трения в клиновом механизме определяется из уравнения

где f – коэффициент трения скольжения между трущимися поверхностями клиньев и ползуна (f = 0,l при хорошей обработке).


Давление на один клин со стороны ползуна с учетом угла трения:

Продольная сила в зоне контакта ползуна и клина:

Горизонтальная составляющая силы N1:

Горизонтальная сила в зоне контакта клина с опорной поверхностью:

где N2 – вертикальная реакция опорной поверхности клина,


Продольное усилие в паре винт-гайка:

Ввиду того, что Рв меняет свое направление, для винтовой пары выбираем трапецеидальную резьбу. В качестве материала винта выбираем сталь Ст.5.
Определим параметры винта.
Внутренний диаметр винта d1 определяем по формуле

Для диаметров винта до 30 мм (предполагаем, что он будет < 30 мм) допускаемое напряжение растяжения и сжатия |σ| составляет 40 – 60 MПа. Примем |σ| = 50 МПа. Тогда для двух пар винт-гайка:

Проверим устойчивость винта при сжатии.
Примем, что максимальная длина винта l составляет третью часть от длины распорной плиты: l = l/3·350=116,6. Тогда:


где λ – гибкость стержня;
imin – минимальный радиус инерции поперечного сечения винта;
μ – коэффициент приведения длины, зависящий от способа закрепления концов винта (для нашего случая μ = 0,5);
l∙ μ – приведенная длина винта;
I – минимальный главный центральный момент инерции поперечного сечения винта;
F – площадь поперечного сечения винта.

Для такой гибкости по соответствующим таблицам коэффициент уменьшения основного напряжения φ0 = 0,975.
Допускаемая нагрузка составит:

что больше Pв = 6,4 кН.
Выбираем основные параметры трапецеидальной резьбы, приняв с запасом d1 = 22 мм. Тогда средний диаметр винта dср = 25,5 мм, а наружный диаметр d = 28 мм.
Момент одной винтовой пары определяем по формуле

где α1 – угол подъема средней винтовой линии, α1 = 3°;
φ1 – приведенный угол трения в паре винт-гайка.


где f – коэффициент трения в резьбе ;
β – половина угла профиля трапецеидальной резьбы, β = 15°.

С учетом двух винтовых пар общий момент в парах винт-гайка:

Необходимое число витков в гайке определим по формуле

где dв – внутренний диаметр гайки.

где S – шаг резьбы;
│q│ – допускаемое удельное давление в паре винт-гайка для стального винта и чугунной гайки │q│ = 4,5...6,0 МПа, для стальной гайки и стального винта │q│ = 7,5...13,0 МПа, для стального винта и бронзовой гайки │q│ = 8...12 МПа.
Принимаем q = 5,0 МПа, тогда:

Далее расчет сводится к определению длины и диаметра рычага привода винта.
Момент, обеспечивающий перемещение клиньев ползуна:

где Рр – усилие на рукояти с храповым устройством (принимаем но нормам в пределах 150...300 Н);
L – длина рукояти, которой необходимо задаться.
Если Рр превышает предельное значение, то необходимо привод механизировать, рассчитав привод.
Для того, чтобы подобрать электродвигатель привода механизма регулирования разгрузочной щели щековой дробилки со сложным движением щеки, необходимо задаваться временем tp, в течение которого предполагается изменение щели на требуемую величину. Тогда число оборотов винта nв, об/мин, определяется по формуле

где е – ширина разгрузочной щели.
Определив nв, можно рассчитать мощность электродвигателя N, кВт, по формуле

где η – КПД передачи.
Далее из каталога выбираем ближайший по мощности электродвигатель с большим значением, чем расчетное. Передаточное число в этом случае:

Затем по величине i выбираем соответствующий редуктор.