

Учебное пособие 800662
.pdfТаблица 6.1 Удельные потери в стали, Вт/кг, толщиной 0,5 мм
при индукции В = 1 Тл и частоте перемагничивания f = 50 Гц
Марка стали |
Удельные |
Марка стали |
Удельные |
потери, Вт/кг |
потери, Вт/кг |
||
2013 |
2,5 |
2312 |
1,75 |
2212 |
2,2 |
2412 |
1,3 |
2214 |
2 |
|
|
Добавочные потери в стали (добавочные потери холостого хода) подразделяют на поверхностные (потери в поверхностном слое коронок зубцов статора и ротора от пульсаций индукции в воздушном зазоре) и пульсационные потери в стали зубцов (от пульсации индукции в зубцах).
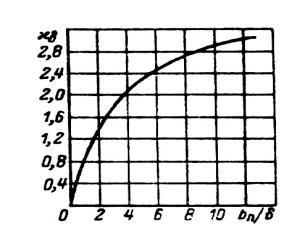
Для определения поверхностных потерь вначале находят амплитуду пульсации индукции в воздушном зазоре над коронками зубцов статора и ротора (рис. 6.1, а), Тл:
B01(2) = β01(2) kδ Bδ. |
(6.4) |
Для зубцов статора β01 зависит от отношения ширины шлица пазов ротора к воздушному зазору: β01 = f (bш2 /δ); для зубцов ротора – от отношения ширины шлица пазов статора к воздушному зазору: β02 = f (bш1 / δ) . Зависимость β0 = f (bш / δ) приведена на рис. 6.1, б.
0 |
|
0,4 |
|
0,3 |
|
0,2 |
|
0,1 |
|
bш |
/ |
0 |
|
Рис. 6.1. К расчету поверхностных потерь в асинхронных машинах |
|
По В0 и частоте пульсаций индукции над зубцами, равной Z2n для статора и Z1n для ротора, рассчитывают удельные поверхностные потери, т. е. потери, приходящиеся на 1м2 поверхности головок статора и ротора:
для статора
|
|
Z2n |
1,5 |
|
3 |
|
2 |
2 |
|
|
|
||
Рпов1 = 0,5 k01 ( |
|
) (B0,1tz2 10 |
|
|
) , Вт/м |
, |
|
(6.5) |
|||||
10000 |
|
|
|
||||||||||
для ротора |
|
Z1n |
|
|
|
|
|
|
|
|
|
|
|
Рпов2 = 0,5 k02 ( |
1,5 |
(B0,2tz1 10 |
3 |
2 |
2 |
|
|
||||||
|
) |
|
|
) |
, Вт/м |
|
, |
(6.6) |
|||||
10000 |
|
|
|
||||||||||
В этих выражениях k01(02) – коэффициент, учитывающий влияние обработки поверхности головок зубцов статора (ротора) на удельные потери; если поверхность не обрабатывается (двигатели мощностью до 160 кВт, сердечники статоров которых шихтуют на цилиндрические оправки), то k01(02) = 1,4...1,8, при шлифованных поверхностях (наружная поверх-
81
ность роторов машин средней и большой мощности и внутренняя поверхность статора двигателей Р2 > 160 кВт) k01(02) = 1,7...2,0; n = nc (1 – S) ≈ nc – частота вращения двигателя, об/мин.
Полные поверхностные потери статора, Вт,
Рпов.1 = pпов.1 (tz1 – bш1) Z1 lст1. |
(6.7) |
Полные поверхностные потери ротора, Вт,
Рпов2 =pпов2(tz2 - bш2)Z2 lcт2. |
(6.8) |
Для определения пульсационных потерь вначале находится амплитуда пульсаций индукции в среднем сечении зубцов Впул, Тл:
для зубцов статора
Впул1 |
= |
2 |
Bz1ср ; |
(6.9) |
|
||||
|
|
2tz1 |
|
|
для зубцов ротора
Впул2 |
= |
1 |
B |
. |
(6.10) |
|
2tz2 |
||||||
|
|
z2ср |
|
|
В этих формулах Bz1cp и Bz2cp – средние индукции в зубцах статора и ротора, Тл
|
|
|
(bш1 / ) |
2 |
|
|
|
|
||
1 |
|
|
|
|
; |
|
||||
5 bш1 / |
|
|||||||||
|
|
|
|
(6.11) |
||||||
|
|
|
(b |
/ )2 |
|
|
||||
|
|
|
ш2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
. |
|
||
|
5 b |
|
/ |
|
|
|||||
|
|
|
ш2 |
|
|
|
|
|
|
|
При открытых пазах на статоре или на роторе при определении γ1 и γ2 в (6.11) вместо bш1 или bш2 подставляют расчетную ширину раскрытия паза, равную:
b'ш1(2) = |
bш1(2) |
1 |
0,5tz1(2) |
, |
(6.12) |
|
3 |
tz1(2)bш1(2) k |
|||||
|
|
|
|
здесь индекс 1 соответствует расчету b'ш1, индекс 2 – расчету b'ш2.
Значения коэффициента kδ в зависимости от отношения δп/δ для открытых пазов приведены на рис. 6.2.
Пульсационные потери в зубцах статора
Pпул1 ≈ 0,11 |
|
Z |
2 |
n |
Bпул1 |
|
2 |
mz1 ; |
(6.13) |
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||
|
1000 |
|
|
|
|
|
|
|||||||
пульсационные потери в зубцах ротора |
|
|
|
|
|
|
|
|
|
|
|
|
||
Pпул2 ≈ 0,11 |
|
|
Z |
1 |
n |
|
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
Bпул2 |
|
mz2 . |
(6.14) |
||||
|
|
|
|
|
|
|
||||||||
|
1000 |
|
|
|
|
|||||||||
В этих формулах mz1 – масса стали зубцов статора, кг, |
определяется по (6.3); |
|||||||||||||
mz2 – масса стали зубцов ротора, кг:
82
mz2 = Z2 hz2 bz2ср lст2 kc2 γc |
(6.15) |
где hz2 – расчетная высота зубца ротора, м; bz2cp – средняя ширина зубца ротора, м:
bz2cp = (bz2max + bz2min) / 2.
Рис. 6.2. К расчету пульсационных потерь в асинхронных машинах
Поверхностные и пульсационные потери в статорах двигателей с короткозамкнутыми или фазными роторами со стержневой обмоткой обычно малы, так как в пазах таких роторов bш2 мало и пульсации индукции в воздушном зазоре над головками зубцов статора незначительны. Поэтому расчет этих потерь в статорах таких двигателей не проводят.
В общем случае добавочные потери в стали
Рстдоб = Рпов1 + Рпул1 + Рпов2 + Рпул2, Вт |
(6.16) |
и полные потери в стали асинхронных двигателей
Pст = Рст.осн + Рст.доб, Вт. |
(6.17) |
Обычно Рст.доб приблизительно в 5–8 раз меньше, чем Рст.осн.
Электрические потери
Электрические потери в асинхронных двигателях рассчитывают раздельно в обмотках статора и ротора [11].
Электрические потери во всех фазах обмотки статора, Вт,
Pэ1 = m1 I12 r1. |
(6.18) |
Электрические потери во всех фазах обмотки фазного ротора, Вт,
Рэ2 = m2 I22 r2 = m1 I1/ 2 r2/ . |
(6.19) |
Электрические потери в обмотке короткозамкнутого ротора, Вт,
Pэ2 = m2 I22 r2 = Z2 I22 r2 |
(6.20) |
83

или
Рэ2 = m1 I1/ 2 r2/ . |
(6.21) |
Электрические потери в щеточном контакте Рэ.ш, Вт, фазных роторов асинхронных двигателей, не имеющих приспособлений для подъема щеток и замыкания накоротко контактных колец при номинальном режиме работы,
Рэ.щ = m2 ΔUщ Iк.к, |
(6.22) |
где ΔUщ – падение напряжения в скользящем контакте щетка – кольцо, В; принимается в зависимости от марки щеток по приложению 4; Iк.к – ток в кольце, А; при соединении обмотки ротора в звезду Iк.к = I2 ; при соединении обмотки ротора в треугольник (при m2 = 3)
Iк.к = 
 3I2,
3I2,
или Рэ.щ = Рэ.щ ном (I1 / I1ном)2.
Механические и вентиляционные потери
Механические и вентиляционные потери в асинхронных двигателях рассчитывают по приближенным формулам, полученным из опыта проектирования и эксплуатации двигателей. Коэффициент трения (Кт) учитывает конструкцию, скорость вращения, число пар полюсов, мощность двигателя. Его размерность изменяется в зависимости от вида формулы для определения Рмех (6.23 – 6.27) [11].
Потери на трение в подшипниках и вентиляционные потери в двигателях с радиальной системой вентиляции без радиальных вентиляционных каналов, с короткозамкнутым ротором и вентиляционными лопатками на замыкающих кольцах, Вт,
Рмех ≈ КТ (n / 1000)2 (10D)3; |
(6.23) |
Кт = 5 при 2р = 2; Кт = 6 при 2р ≥ 4 для двигателей с Da ≤ 0,25 м; Кт = 6 при 2р = 2; Кт = 7 при 2р ≥ 4 для двигателей с Da > 0,25 м. В двигателей с двигателях с внешним обдувом (0,1 ≤ Da ≤ 0,5 м)
Рмех = КТ (n /10)2 D4a ; |
(6.24) |
Кт = 1 для двигателей с 2р = 2 и Кт = 1,3(1 - Da) при 2р ≥ 4.
В двигателях с радиальной системой вентиляции средней и большой мощности
Рмех = КТ (n /1000)2 (10·Da )3; |
(6.25) |
где nк – число радиальных вентиляционных каналов; при отсутствии радиальных каналов nк = 0.
В двигателях с аксиальной системой вентиляции
Рмех = КТ(n/1000)2 (10 Dвент)3, |
(6.26) |
где D вент – наружный диаметр вентилятора, м; в большинстве конструкций можно принять Dвент ≈ Da; Kт = 2,9 для двигателей с Da ≤ 0,25 м; Кт = 3,6 для двигателей с
Da = 0,25...0,5 м.
В двигателях большой мощности (0,5 < Da < 0,9 м)
Рмех = КТ (10Da)3 |
(6.27) |
В этом выражении коэффициент Кт принимается по табл. 6.2.
84

Таблица 6.2
К расчету механических потерь двигателей большой мощности
2p |
2 |
4 |
6 |
8 |
10 |
12 |
Кт |
3,65 |
1,5 |
0,7 |
0,35 |
0,2 |
0,2 |
Потери на трение щеток о контактные кольца, Вт, рассчитывают для двигателей с фазными роторами при отсутствии приспособлений для подъема щеток и закорачивания контактных колец в номинальном режиме работы:
Ртр.щ = Ктр ρщ Sщ υк, |
(6.28) |
где Ктр – коэффициент трения щеток о контактные кольца (обычно принимается равным 0,16–0,17); ρщ – давление на контактной поверхности щеток, кПа (Приложение 4); Sщ – общая площадь контактной поверхности всех щеток, м2; υk – линейная скорость поверхности контактных колец, м/с.
Добавочные потери при нагрузке асинхронных двигателей возникают за счет действия потоков рассеяния, пульсаций индукции в воздушном зазоре, ступенчатости кривых распределения МДС обмоток статора и ротора и ряда других причин. В короткозамкнутых роторах, кроме того, возникают потери от поперечных токов, т. е. токов между стержнями, замыкающихся через листы сердечника ротора. Эти токи особенно заметны при скошенных пазах ротора. В таких двигателях, как показывает опыт эксплуатации, добавочные потери при нагрузке могут достигать 1...2 % (а в некоторых случаях даже больше) от подводимой мощности. ГОСТ устанавливает редкие расчетные добавочные потери при номинальной нагрузке, равные 0,5 % номинальной потребляемой мощности. При расчетах потерь и КПД двигателей в режимах, отличных от номинального, значение добавочных потерь пересчитывают пропорционально квадрату токов:
Рдоб = Рдоб.ном (I1/I1ном)2 или Рдоб = 0,005·Р1 . |
(6.29) |
||
Коэффициент полезного действия двигателя |
|
||
η = Р2 /P1 = 1 - Р/ P1, |
(6.30) |
||
где Р PСТ PМЕХ PЭ1 PЭ2 Pдоб PТР.Щ PЭЩ – сумма всех потерь в двигателе, Вт. |
|||
Ток холостого хода двигателя |
|
|
|
Iх.х |
|
|
|
I2х.х.а I2х.х.р |
, А |
(6.31) |
|
При определении активной составляющей тока холостого хода принимают, что потери на трение и вентиляцию и потери в стали при холостом ходе двигателя такие же, как и при номинальном режиме. При этом условии
Iх.х.а = Рст Рмех Рэ1х.х , А |
(6.32) |
mU1ном |
|
Электрическиепотерив статоре при холостом ходе приближенно принимаются равными:
Рэ1х.х = m I2μ r1, Вт.. |
(6.33) |
Реактивная составляющая тока холостого хода
Iх.х.р ≈ Iμ, А |
(6.34) |
Коэффициент мощности при холостом ходе
cos φх.х = Iх.х.а / Iх.х. |
(6.35) |
85
6.2. Расчет рабочих характеристик
Рабочими характеристиками асинхронных двигателей называют зависимости P1, I1,
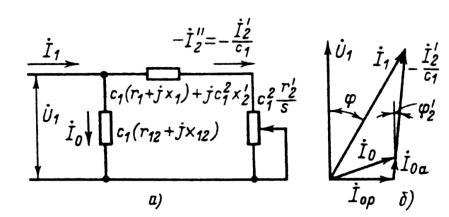
cosφ, η, s1 = f (P2). Часто к ним относят также зависимости М = f (P2) и I2 или I/2 = (P2) [4]. Методы расчета характеристик базируются на системе уравнений токов и напряжений
асинхронной машины, которой соответствует Г-образная схема замещения (рис. 6.3). Г-образная схема получена из Т-образной схемы замещения (см. рис. 5.1), в которой ветвь, содержащая параметр Z12, вынесена на вход схемы. Т-образная и Г-образная схемы идентич-
ны для данной конкретной ЭДС, для которой рассчитывают комплексный коэффициент с1 ,
равный взятому с обратным знаком отношению вектора напряжения фазы U1 к вектору
ЭДС – Е1
Рис. 6.3. Г-образная схема замещения асинхронной машины (а)
исоответствующая ей векторная диаграмма (б)
Васинхронных двигателях при изменении тока от синхронного холостого хода до
номинального Е1 изменяется незначительно. Поэтому для получения рабочих характеристик
коэффициент с1 , рассчитывают для синхронного холостого хода и принимают его значение неизменным. Это не вносит заметных погрешностей в расчет характеристик, так как значе-
ние коэффициента с1 , во всем диапазоне изменения нагрузки от Р2 = 0 до Р2 = Р2ном изменяет-
ся лишь в третьем или четвертом знаке.
Корректировку коэффициента с1 , обычно производят лишь при расчете пусковых ха-
рактеристик или режимов работы двигателя с большими скольжениями, при которых ток статора существенно превышает номинальный.
Для расчета рабочих характеристик коэффициент определяют из выражения
|
|
Z1 Z12 1 |
|
Z1 |
|
|
|
||
|
с1 |
|
c1e j , |
|
|
||||
|
|
|
|
|
|||||
где |
|
|
Z12 |
Z12 |
|
|
|||
|
|
r1x12 |
r12 x1 |
|
|
||||
|
arctg |
. |
(6.36) |
||||||
|
|
|
|
||||||
r12 (r1 r12 ) x12 (x1 x2 )
В асинхронных двигателях мощностью более 2 – 3 кВт, как правило, | γ | ≤ 1°, поэтому реактивной составляющей коэффициента с1, можно пренебречь, тогда приближенно
|
х |
|
|
с1 с1 1 |
1 |
. |
(6.37) |
х |
|||
|
12 |
|
|
86

При более точных расчетах определяют и активную, и реактивную составляющие c1 по следующим формулам:
с1а |
|
r (r r |
) x ( x x ) |
|
|
|||||
12 1 12 |
|
|
12 |
1 12 1 |
, |
|
||||
|
|
2 |
|
2 |
|
|
||||
|
|
|
r12 |
x12 |
|
|
|
(6.38) |
||
|
|
x1r12 |
r1x12 |
|
|
|
|
|
||
c1p |
|
. |
|
|
|
|
|
|||
|
2 |
2 |
|
|
|
|
|
|||
|
|
r12 |
x12 |
|
|
|
|
|
|
|
Полное значение
с1 |
с12а с12р . |
(6.39) |
Как видно, выражение (6.37) может быть получено из (6.39) при условии r12 << х12 и r1 << х12, что практически всегда имеет место в асинхронных машинах мощностью Р2 ≥ 2...3 кВт. При этих же условиях с1p ≈ 0 и с1a = с1.
Рабочие характеристики можно рассчитать по круговой диаграмме или аналитическим методом. Расчет по круговой диаграмме более нагляден, но менее точен, так как требует графических построений, снижающих точность расчета. Аналитический метод более универсален, позволяет учитывать изменение отдельных параметров при различных скольжениях и может быть легко переведен на язык программ при использовании в расчетах ЭВМ.
Аналитический метод расчета
В настоящее время практически все расчеты проводят аналитическим методом. Формулы для расчета рабочих характеристик приведены в табл. 6.3 в удобной для ручного счета последовательности. Расчет характеристик проводят, задаваясь значениями скольжений в диапазоне S ≈ (0,2...1,5) Sном. Номинальное скольжение можно предварительно взять при
Sном ≈ r/2 . Для построения характеристик достаточно рассчитать значения требуемых вели-
чин для пяти - шести различных скольжений, выбранных в указанном диапазоне примерно через равные интервалы [11].
Перед началом расчета рекомендуется выписать значения постоянных, не зависящих от скольжения величин, как это показано в формуляре. К таким величинам относятся номинальное напряжение фазы U1ном, сопротивления r1 и r2/ , сумма потерь Pcт + Pмех (для двига-
телей с фазным ротором также Ртр.щ) и составляющие тока синхронного холостого хода: реактивная I0р ≈ Iμ и активная, которую определяют из выражения
I0а |
|
РСТ.ОСН 3I2 |
r1 |
, |
(6.40) |
3U1НОМ |
|
||||
|
|
|
|
|
Выписывается также значение коэффициента с1, определенное по (6.37) или по (6.39), и расчетные величины, обозначенные в формуляре а, а', b и b' . Формулы для их определения зависят от принятого (точного или приближенного) метода расчета с1.
Если |γ| ≤ 1°, то можно использовать приближенный метод, так как в этом случае c1р ≈ 0 и с1 ≈ 1 + х1/х12. Тогда
|
/ |
|
2 |
;.... |
|
|
; |
|
|
|
|
|
|
||||||
а |
|
c1 |
a |
|
(6.41) |
||||
|
|
|
|
c1r1 |
|
||||
b/ |
0.....b |
c1( x1 c1 x2/ ). |
|
|
|||||
87

Если же расчет с1 проводить по уточненным формулам (6.38) и (6.39), то
а/ c12а с12р ;....a c1a r1p x1 b/ x2/ ; |
|
|
(6.42) |
|
b/ c2 |
;.....b c1a x1 c1p r1 a/ x |
2/ . |
|
|
|
|
|||
1a |
|
|
|
|
Расчет характеристик рекомендуется проводить в следующей последовательности. Вначале находят активную и реактивную составляющие комплексного сопротивления
правой ветви схемы замещения (см. рис. 6.3):
/
ZВЕТВИ = c1(r1 + jx1) + j c12 x/2 + с12 rs2 , (6.43)
где R – активное сопротивление; X – индуктивное сопротивление:
|
|
|
|
|
|
/ |
|
|
|
|
|
R с1r1 c12 rs2 |
|
(6.44) |
|||||
|
|
X c1 x1 c12 x22. |
|
||||||
Из (6.44) с учетом (6.42) или (6.43) получают |
|
|
|||||||
|
R = a' r2 |
+ а, Ом, |
|
(6.45) |
|||||
|
|
|
s |
|
|
|
|
||
|
X = b+b' |
r' |
, Ом; |
|
(6.46) |
||||
|
2 |
|
|
||||||
s |
|
||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
Z |
|
R2 X2. |
. |
|
(6.47) |
||
Далее находят |
|
|
|
|
|
|
|
||
I2// |
U1ном |
, cos 2/ |
R/Z и sin 2/ |
X / Z |
|||||
Z |
|||||||||
Составляющие тока статора являются суммами активных и реактивных составляющих токов параллельных ветвей схемы замещения:
|
I1a I01 I2// cos 2/ ; |
(6.48) |
|||
|
I1p I0 p I2// sin 2/ |
|
|
||
|
. |
|
|||
Полный ток статора |
|
|
|
|
|
I1 |
|
|
|
|
|
|
I12a I12p |
, А. |
|
(6.49) |
|
Приведенный ток ротора |
|
|
|
|
|
|
|
I2/ c1 I2// , А. |
|
(6.50) |
|
Ход последующих расчетов ясен из приведенных формул в формуляре (табл. 6.3).
88

Таблица 6.3 Формуляр расчета рабочих характеристик асинхронных двигателей
Рном =…; 2р =…; U1ном =….В; I1ном =…А; I0a =…А;I0р ≈ Iμ =…А;
Рст + Ртр.щ. + Рмех =…кВт; Рэ.щ.ном = …кВт: r1 =…Ом; r/2 =…Ом; с1 =…a/ =…; a = …Ом; b/ =…Ом; b =…Ом
№ |
|
|
|
|
|
|
Расчетная формула |
Единицы |
|
|
Скольжение |
|||
|
|
|
|
|
|
|
|
|
|
|
||||
п/п |
|
|
|
|
|
|
величины |
0,005 |
0,01 |
0,015 |
... |
sном |
||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
a/ r2/ |
|
|
s |
|
Ом |
|
|
|
|
|
||
2 |
|
b/ r2/ |
|
s |
|
|
|
|
Ом |
|
|
|
|
|
3 |
|
R = a +a/ r2/ |
s |
Ом |
|
|
|
|
|
|||||
4 |
|
X = b + b/ r2/ |
s |
Ом |
|
|
|
|
|
|||||
5 |
|
|
|
|
|
|
|
Ом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Z |
R2 X2 |
|
|
|
|
|
|
|
|
|||||
6 |
|
I2'' U1ном Z |
|
А |
|
|
|
|
|
|||||
7 |
|
cos 2/ |
R/Z |
|
- |
|
|
|
|
|
||||
8 |
|
sin 2/ |
X /Z |
|
- |
|
|
|
|
|
||||
9 |
|
I1a I0a I2// |
cos 2/ |
А |
|
|
|
|
|
|||||
10 |
|
I1p I0p I2// sin 2/ |
А |
|
|
|
|
|
||||||
11 |
|
I1 |
|
|
|
|
|
|
|
|
|
|||
|
I12a I12p |
|
|
А |
|
|
|
|
|
|||||
12 |
|
I2/ c1 I2// |
|
А |
|
|
|
|
|
|||||
13 |
|
P1 = 3 U1ном I1a 10 -3 |
кВт |
|
|
|
|
|
||||||
14 |
|
Рэ1 = 3 I12 r1 10-3 |
кВт |
|
|
|
|
|
||||||
15 |
|
Рэ1 = 3 (I1/)2 r/2 10-3 |
кВт |
|
|
|
|
|
||||||
16 |
|
Рэ.щ. ≈ Рэ.щ.ном. (I1/I1ном)2 |
кВт |
|
|
|
|
|
||||||
17 |
|
Рдоб = 0,005 Р1 |
кВт |
|
|
|
|
|
||||||
18 |
|
Σ Р = Рст + Рмех + Ртр.щ + Рэ1 +Рэ2 + Рэ.щ + Рдоб |
кВт |
|
|
|
|
|
||||||
19 |
|
Р2 = Р1 - Σ Р |
|
кВт |
|
|
|
|
|
|||||
20 |
|
η = 1 - Σ Р / P1 |
– |
|
|
|
|
|
||||||
21 |
|
cos φ = I1a / I1 |
– |
|
|
|
|
|
||||||
*Для двигателей с короткозамкнутым ротором Рэ.щ.ном = 0.
После окончания расчета для принятых значений скольжения строится характеристика S = f (P2), по которой уточняется значение Sном, соответствующее заданной номинальной мощности Р2ном, и заполняется последний столбец формуляра.
В приведенных формулах не учтено возможное изменение параметров при S > Sном. Поэтому при расчете характеристик двигателей с двухклеточными короткозамкнутыми роторами или с роторами, имеющими фигурные пазы, в которых в повышенной степени проявляется действие эффекта вытеснения тока, для каждого из принятых значений скольжения, больших Sном, необходимо уточнять значения параметров r'2 и х'2 [11].
89

Рис. 6.4. Внешний вид рабочих характеристик
6.3. Расчет пусковых характеристик
С увеличением частоты тока в стержнях обмотки короткозамкнутого ротора возникает эффект вытеснения тока, в результате которого плотность тока в верхней части стержней возрастает, а в нижней уменьшается, при этом активное сопротивление ротора увеличивается, а индуктивное уменьшается. Изменение сопротивлений ротора влияет на пусковые характеристики машины [11].
Вбольшинстве случаев эффект вытеснения тока в обмотках короткозамкнутых роторов играет положительную роль, так как увеличивает начальные моменты двигателей. Это широко используют при проектировании асинхронных машин, выполняя роторы с глубокими прямоугольными или фигурными пазами или с двойной беличьей клеткой, в которых эффект вытеснения тока проявляется особенно сильно. Однако неравномерное распределение плотности тока по сечению стержня ротора может привести и к нежелательным последствиям. Например, при неудачно выбранных размерных соотношениях стержней чрезмерно возрастающая в пусковых режимах плотность тока в их верхних участках может вызвать неравномерное тепловое удлинение стержней и их изгиб. При этом стержни разрывают усики пазов и выгибаются в воздушный зазор, что неизбежно приводит к выходу двигателя из строя.
Всвязи с этим правильный учет влияния эффекта вытеснения тока является необходимым при проектировании асинхронных машин с короткозамкнутыми роторами.
Врасчетах удобнее определять не непосредственно активное и индуктивное сопротивления стержней при неравномерной плотности тока, а их относительные изменения под действием эффекта вытеснения тока. Эти изменения оценивают коэффициентами kr и kд. Коэффициент kr показывает, на сколько увеличилось активное сопротивление пазовой части стержня rcξ при неравномерной плотности тока в нем по сравнению с его сопротивлением rс при одинаковой плотности по всему сечению стержня:
kr = rcξ / rс. |
(6.51) |
90