

Учебное пособие 800466
.pdf
|
1,2 106 |
|
|
1 |
|
|
|
|
|
1 |
|
|
|
f |
|
|
|
1,2 106 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P ср = 2 |
|
|
|
|
df |
|
|
|
|
|
arctg |
|
|
|
|
|
|
|
|
|
2 |
|
11 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||||
|
0,8 106 |
(1 f |
|
) 5 |
10 |
5 |
1011 |
|
|
5 1011 |
|
|
|
0,8 106 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1, 4 10 6 |
arctg(1, 7) arctg(1,13) 2, 73 10 7 |
В2. |
|||||||||||||||
Рис. 5.3. Коэффициент передачи фильтра КолмогороваВинера
Если же попытаться воспользоваться идеальным полосовым фильтром, то сигнал искажаться не будет, но весь шум, умещающийся в полосу пропускания ИПФ, будет «как есть»
составлять сигнал ошибки (t) |
nвых (t) . В этом случае: |
||||||||||
|
1,2 106 |
1,2 106 |
|
|
df |
|
2 arctg f |
|
|
1,2 106 |
|
|
2 |
N ( f ) df = 2 |
|
|
|
|
|||||
P ср = |
|
|
|
|
|
0,8 106 |
|||||
1 |
f |
2 |
|||||||||
|
|
||||||||||
|
0,8 106 |
0,8 106 |
|
|
|
|
|
||||
|
|
2 arctg(1, 2106 ) arctg(0,8106 ) |
8,3310 7 В2. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
100
Таким образом, более высокий по сравнению с фильтром Колмогорова-Винера коэффициент передачи не обеспечивает необходимой фильтрации шума, из-за чего средняя мощность сигнала ошибки увеличивается более чем втрое.
Проанализируем целесообразность уменьшения коэффициента передачи ИПФ до K0 0, 6 . При этом средняя мощность
шума, |
проходящего на выход фильтра, снижается до Pn вых |
0, 62 |
8,33 10 7 3 10 7 В2, что всё равно чуть превышает |
величину P ср для фильтра Колмогорова-Винера, плюс к Pn вых |
|
следует ещё добавить составляющую, возникающую из-за искажений полезного сигнала. Таким образом, подбор величины коэффициента передачи ИПФ хотя и позволяет снизить среднюю мощность сигнала ошибки, но погрешность фильтрации всё же остаётся более высокой чем для случая фильтра Колмо-
горова-Винера. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Отметим, что при увеличении интенсивности полезного |
|||||||||||||||||||||
сигнала, например, вдвое ( S( f ) 4 10 12 В2/Гц), |
мощность сиг- |
|||||||||||||||||||||
нала ошибки тоже увеличивается |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
1,2 10 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,2 10 |
6 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
f |
|
|
|
|
|
|||
P = 2 |
|
|
|
|
|
|
|
|
|
df |
arctg |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ср 2 |
|
|
|
2 |
|
12 |
|
1 |
|
|
6 |
|
6 |
|
|
|
||||||
|
|
6 (1 f |
) (4 10 |
|
) |
|
|
0,5 10 |
|
0,5 10 |
|
|
|
|
||||||||
|
|
0,8 10 |
|
|
|
|
|
|
|
|
|
0,8 10 |
6 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 10 6 arctg(2, 4) arctg(1, 6) 3, 28 10 7 |
В2 , |
|||||||||||||||||
однако здесь нет парадокса, т.к. степень искажений определяется соотношением между P ср и мощностью самого полезного
сигнала. Для исходной ситуации
1,2 106 |
|
|
|
|
PS = 2 |
2 10 12df |
= 2 0, 4 106 2 10 12 |
|
1, 6 10 6 , |
0,8 106 |
|
|
|
|
101
т.е. мощность сигнала ошибки P ср 2, 7310 7 составляет примерно 17% от мощности случайного процесса S(t). В новой
же ситуации, при |
P |
= 3, 2 10 6 |
В2, увеличившаяся мощность |
|
|
|
S 2 |
|
|
сигнала ошибки |
P |
|
3, 2810 7 |
составляет примерно 10% от |
|
ср 2 |
|
|
|
мощности полезного сигнала, что соответствует лучшему качеству фильтрации.
102

6. ОПТИМАЛЬНОЕ ОБНАРУЖЕНИЕ СИГНАЛОВ ИЗВЕСТНОЙ ФОРМЫ НА ФОНЕ ПОМЕХ
6.1. Теоретические основы обнаружения сигналов известной формы
Целью обработки данных при обнаружении сигналов является принятие решения о наличии обнаруживаемого сигнала в составе принятой выборки данных. И как бы сложно или просто ни была организована обработка данных на финальном этапе нужно будет принимать лишь одно из двух решений: «Да = сигнал был» или «Нет = сигнал не наблюдался». Как следствие, основой принятия решения может служить пороговая схема, показанная на рис. рис. 6.1. Здесь на вход обнаружителя поступает либо помеха (t), либо детерминированный полезный сигнал u(t) в смеси с той же помехой. Обработанный шум (либо смесь сигнала и шума) поступает на вход решающего устройства, обозначенного на рисунке как «РУ», которое и обязано сформировать решение о регистрации сигнала.
u(t) (t) |
|
|
|
Да = сигнал есть |
|
|
|
|
|
K( ) |
|
РУ |
|
|
(t) |
|
|
||
|
|
|
Нет = сигнала нет |
|
|
Рис. 6.1. Структурная схема обнаружителя точно известного сигнала
Формально, в качестве устройства обработки могут использоваться как линейные, так и нелинейные устройства, однако сопоставление потенциальных возможностей подобных подходов показывает, что нелинейная обработка может обеспечить преимущества над линейной лишь при заметном отличии распределения помехи (t) от нормального. Однако большинство систем, в состав которых могут входить обнару-
103

жители, как правило, предусматривают относительно узкополосную фильтрацию поступающих на их вход процессов, что сопровождается проявлением эффекта нормализации (см. п. 3.3). Таким образом, сопровождающая появление полезного сигнала помеха (t), как правило, является стационарной и имеет распределение близкое к нормальному, когда добавление в обнаружитель нелинейных элементов не даёт каких-либо преимуществ. Наконец, и трудоемкость анализа нелинейных фильтров существенно превосходит трудности исследования фильтров линейных.
В связи с этим, ограничимся анализом обнаружителей, в которых в роли обработчика смеси полезного сигнала с помехой выступает линейный фильтр с комплексным коэффициентом передачи K( ) .
6.2. Критерий качества при обнаружении полезного сигнала на фоне аддитивного шума
Как правило, помехой, сопровождающей полезный сигнал, является СП с нулевой постоянной составляющей, что означает: в отсутствие полезного сигнала прошедший через линейный фильтр и поступающий на вход решающего устройства процесс также будет иметь нулевое математическое ожидание. Приход вместе с помехой полезного сигнала может сместить среднее значение отклика обрабатывающего фильтра в отрицательную или положительную область. Если это смещение будет иметь значительную величину, то плотности вероятности формируемых линейным фильтром СП будут существенно разнесены друг относительно друга, что может служить основой их успешного различения (см. рис. 6.2). Таким образом, обнаружение полезного сигнала на фоне шума будет осуществляться тем надежнее, чем меньше степень перекрытия распределений, представленных на рис. 6.2.
104

WРУ (x) Сигнала нет (H0)
Сигнал есть (H1)
0 |
uпорог uвых(t0) |
x |
Рис. 6.2. Распределения процессов, поступающих на вход решающего устройства при обнаружении сигналов
Механизм обнаружения состоит в том, что в некоторый заранее выбранный момент времени t0 решающее устройство сравнивает мгновенное значение сигнала, поступающего с выхода линейного фильтра, с пороговым уровнем uпорог и при фиксации превышения порога принимается решение о том, что сигнал на вход устройства поступал, а при значениях uвых(t0) меньших порога считается, что полезный сигнал отсутствовал. При этом возможны ошибки двух типов:
а) ошибка первого рода или ложная тревога наступает, если в отсутствие полезного сигнала на входе решающего устройства будет наблюдаться значение, превышающее порог
|
|
|
|
|
|
WРУ (x | H0 ) dx . |
(6.1) |
uпорог
б) ошибка второго рода или пропуск сигнала возникает, если при наличии полезного сигнала отклик линейного фильтра на смесь сигнала и шума окажется меньше порога
|
|
uпорог |
|
|
|
WРУ (x | H1 ) dx . |
(6.2) |
Изменяя величину порога uпорог можно влиять на вероятности этих ошибок, но уменьшение за счет повышения порога будет сопровождаться ростом вероятности пропуска сигнала, а сни-
105

жение порога позволит уверенно обнаруживать даже слабые сигналы, но повлечет рост вероятности ложной тревоги.
Для повышения «контрастности» распределений и одновременного снижения как , так и , необходимо обеспечить максимально возможное значение величины
q |
uвых |
(t0 ) |
, |
(6.3) |
|
|
|||
|
ш вых |
|||
|
|
|||
где ш вых – эффективное значение шума на выходе линейного фильтра, uвых (t0 ) – отклик этого фильтра на детерминированный обнаруживаемый полезный сигнал u(t) в момент принятия решения t0 .
Итак, при решении задачи обнаружения точно известного сигнала на фоне аддитивного шума оптимальным фильтром, обеспечивающим минимум вероятности ошибочных решений, служит фильтр, гарантирующий максимально возможное отношение сигнал-шум
Kопт ( ) arg max q K( ) . |
(6.4) |
6.3. Обнаружение сигналов на фоне белого шума. Согласованные фильтры и их характеристики
6.3.1. Анализ предельно возможного отношения сигнал-шум на выходе линейного фильтра
Пусть помеха (t), в смеси с которой на вход обнаружителя может поступать полезный сигнал, представляет собой белый шум со спектральной плотностью мощности N0. В соответствии с частотным методом анализа СПМ шума на выходе линейного фильтра можно определить как
S ( ) N |
0 |
|
|
K( ) |
|
2 , |
(6.5) |
|
|
||||||
|
|
|
|
|
|
|
где |K( )| – амплитудно-частотная характеристика фильтра.
106

Тогда эффективное значение шума на выходе фильтра составит
|
|
|
|
|
1 |
|
2 |
|
|
|
|
ш вых |
|
N0 |
|
|
K( ) |
|
d . |
(6.6) |
|||
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Отклик того же фильтра на детерминированный полезный сигнал запишем на основе обратного преобразования Фурье
|
1 |
|
|
|
uвых ( t0 ) |
2 |
K ( ) Gu |
( ) e j t0 d , |
(6.7) |
|
где Gu ( ) – комплексная спектральная плотность сигнала u(t) . Для сопоставления откликов на полезный сигнал и шумо-
вую компоненту воспользуемся детально проанализированным в прил. 7 неравенством Коши-Буняковского. Для этого обозначим
y( ) K( ) , |
(6.8) |
x( ) G ( ) e j t0 |
(6.9) |
u |
|
и воспользуемся соотношением (П7.4), в соответствии с которым
|
|
1 |
|
2 |
|
|
|
1 |
|
2 |
|
|
||
u (t ) |
2 |
K ( ) |
|
d |
2 |
G ( )e j t0 |
|
d . |
||||||
|
|
|
|
|
|
|||||||||
вых 0 |
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В соответствии с известным равенством Парсеваля [6, (2.42)]
1 |
|
|
2 |
|
1 |
|
|
2 |
|
|
||
|
|
Gu |
( )e j t0 |
|
d |
|
|
Gu |
( ) |
|
d Эu , |
(6.10) |
2 |
|
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где Эu – энергия обнаруживаемого сигнала. Отсюда получаем
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K ( ) |
d |
|
|
Эu |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||
uвых (t0 ) |
|
|
|
|
|
|
|
|
|
|
|
Эu |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(6.11) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ш вых |
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
N0 |
|
|||||
|
N0 |
|
|
|
|
K( ) |
d |
|
||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
причем следствие (П7.5) из неравенства Коши-Буняковского позволяет установить условия, когда данное неравенство превращается в равенство, а именно при
107

K ( ) = A Gu ( ) e j t0 * , |
(6.12) |
|
где (...)* – знак комплексного сопряжения. |
|
|
Фильтр с комплексным коэффициентом передачи |
|
|
K |
( ) = A G* ( ) e j t0 |
(6.13) |
СФ |
u |
|
где Gu ( ) – комплексная спектральная плотность обнаруживаемого сигнала, t0 – момент принятия решения об обнаружении,
называют согласованным с сигналом u(t) . При воздействии на вход такого фильтра сигнала u(t) в аддитивной смеси с белым шумом отношение сигнал-шум на его выходе составит
qСФ |
|
uвых СФ ( t0 |
) |
|
|
Эu |
|
. |
(6.14) |
ш вых СФ |
|
|
|||||||
|
|
|
|
|
N0 |
|
|||
где N0 – спектральная плотность мощности шума, Эu – энергия полезного сигнала, определяемая соотношением
|
1 |
|
|
Gu |
|
2 d . |
|
||
Эu = |
u2 (t) dt = |
|
|
|
(6.15) |
||||
2 |
|||||||||
|
|
|
|
|
|
||||
- |
|
|
|
|
|
|
|
|
|
Отклик на то же воздействие любого иного линейного фильтра будет давать меньшее соотношение сигнал-шум
q qСФ , |
при K( ) KСФ ( ) . |
(6.16) |
Таким образом, согласованный фильтр является оптимальным линейным фильтром при обнаружении полностью известного сигнала на фоне аддитивного белого шума.
6.3.2. Физические причины оптимальности согласованного фильтра при обнаружении детерминированных сигналов
Проанализируем физические причины оптимальности согласованного фильтра. Для этого рассмотрим подробнее выражение для расчета отклика фильтра на «свой» сигнал u(t)
108
u |
|
|
(t) |
1 |
G ( ) AG* ( )e j t0 e |
||||||||
|
|
2 |
|||||||||||
вых СФ |
|
|
|
|
u |
u |
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
2 |
|
|
A |
|
||||
|
|
Gu |
( ) |
e j (t t0 ) d |
|
Gu (i |
|||||||
2 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
i 0 |
||||
j t d
) 2 cos i (t t0 ) . (6.17)
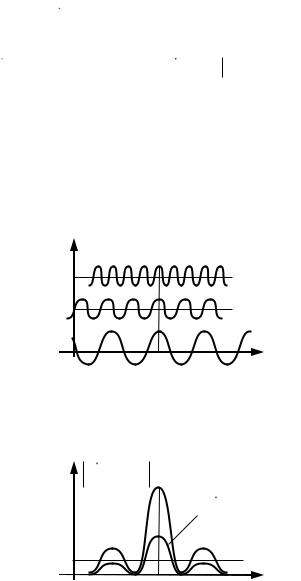
Совокупность составляющих, из которых складывается выходной сигнал uвых СФ (t) , представлена на рис. 6.3. Как видно из рисунка, благодаря особенностям фазочастотной характеристики согласованного фильтра обеспечивается такое сочетание фаз составляющих uвых СФ (t) , что все они в момент времени t0 суммируются синфазно.
uвых СФ i (t)
0 |
t0 |
t |
Рис. 6.3. Временная диаграмма составляющих, из которых складывается отклик согласованного фильтра на «свой» сигнал
KСФ ( )
 Gu ( )
Gu ( ) 
 N0
N0
0 |
ω |
Рис. 6.4. Особенности амплитудно-частотной характеристики согласованного фильтра
109