

Учебное пособие 800242
.pdfРассмотрим принцип автоматического уравновешивания мостовой схемы на примере широко применяемых мостов типа КСМ4, в качестве резистивных преобразователей, у которых применяются стандартные медные или платиновые датчики
температуры (рис. 3.20). Схема представляет собой
обыч-ный одинарный мост переменного тока (см. п.2), уравновешивание которого достигается перемещением ползунка реохорда при помощи реверсивного двигателя РД, ротор которого вращается до тех пор, пока не будет достигнуто
равновесие моста, т.е. напряжение на выходе усилителя У не уменьшится до порога чувствительности двигателя.
Одновременно с перемещением ползунка, происходит движение указателя и пера регистрирующего устройства. Питание моста обычно производится переменным током, поскольку электронный усилитель У переменного тока не обладает дрейфом нуля в отличии от усилителя постоянного тока.
Шкала такого автоматического моста градуируется в единицах температуры и справедлива для стандартного резистивного датчика температуры, изготовленного из меди или платины.
Приведенная погрешность таких мостов равна 0.2 – 0.5 %, быстродействие
1-2 с.
КОМПЕНСАТОРЫ ПОСТОЯННОГО ТОКА
Компенсаторами (потенциометрами) называются приборы для измерения нулевым методом сравнения (см. Гл.1, § 1.4) ЭДС, напряжений или физических величин, функционально с ними связанных.
Принцип измерения ЕX заключается в следующем (рис. 3.21). Сначала устанавливается требуемое для компенсатора значение рабочего тока I с помощью R1. При этом переключатель П устанавливается в положение 1. Затем изменяют R1 до тех пор, пока индикатор (гальванометр) не покажет отсутствие тока, это произойдет при
равенстве E N IR H .
После установления рабочего тока переключатель П устанавливается в положение 2 и перемещением подвижного контакта у резистора R0 опять добиваются показаний индикатора, равных нулю.
81

Это будет при некотором значении сопротивления RX. Тогда можно записать, что EX IRX . Т.о. Ех выразится через стабильные параметры EN, RH и
R0, и будет равно EX R X EN . Этот способ требует постоянства рабочего тока во
R N
время измерений.
Значение Ех снимается с R0, которое состоит из нескольких разрядов, а лимбы каждого разряда градуируются в единицах напряжения.
Точность установления момента компенсации, а следовательно и точность измерения Ех, зависят от полной чувствительности компенсатора
|
SK SCXSГ n / EX , |
где SCX I EX |
– чувствительность схемы компенсатора, SГ n / I - |
чувствительность гальванометра, ΔI – приращение тока в цепи гальванометра, вызванное изменением Ех на Ех, Δn – число делений отклонения гальванометра, при изменении в нем тока на ΔI.
Высокая точность измерения Ех компенсатором обусловлена высокой чувствительностью применяемого гальванометра, высокой точностью ЭДС нормального элемента ЕN и резисторов RN и R0, а также высокой стабильностью вспомогательного источника питания, т.е. I = const.
Достоинством компенсатора является также отсутствие потребления мощности (шунтирующего действия) от источника Ех в момент ее компенсации напряжением UR X . Это обеспечивает высокую точность измерения ЭДС и
напряжений слаботочных источников.
Классы точности компенсаторов постоянного тока находятся в пределах от 0.005 до 0.5. Верхний предел измерений не превосходит 2,5 В.
КОМПЕНСАТОРЫ ПЕРЕМЕННОГО ТОКА
Принцип действия компенсаторов переменного тока заключается в том, что измеряемая ЭДС (напряжение) уравновешивается известным напряжением, создаваемым рабочим током на участке рабочей цепи.
Для уравновешивания двух напряжений переменного тока необходимо равенство этих напряжений по модулю, противоположность по фазе, равенство их частот и идентичность формы кривых. Первые три условия обеспечиваются выбором принципиальной схемы компенсатора и ее питание от одного источника.
В зависимости от того, как производится уравновешивание по модулю и фазе известной и измеряемой ЭДС и в
82

каких координатах получается отсчет Ех, компенсаторы переменного тока делятся на полярно-координатные и прямоугольно-координатные.
На рис. 3.22 приведена схема компенсатора, измеряющего Ех в полярной системе координат. Измеряемая ЭДС, подключенная к зажимам Ех , определяется по положению подвижных контактов ПК1 и ПК2 на шкале калиброванного реохорда «а-б» и магазина сопротивлений «б-в». Фаза напряжения на участке рабочей цепи регулируется фазорегулятором ФР, благодаря чему можно добиться практически полного отсутствия тока в вибрационном или электронном ноль-индикаторе И. Отсчет угла сдвига φх производится по фазорегулятору. Необходимое значение рабочего тока Ip устанавливается по амперметру А при помощи реостата R.
Т.о. получаем не только модуль измеряемых напряжений, но и их фазы. Компенсаторы переменного тока по точности значительно уступают
компенсаторам постоянного тока (см. п.4). Это объясняется тем, что не существует меры ЭДС переменного тока, аналогичной нормальным элементам. Кроме этого рабочий ток в компенсаторах переменного тока приходиться устанавливать по амперметрам в лучшем случае класса точности 0.05 или 0.1, либо по нормальному элементу постоянного тока с использованием термоэлектрического промежуточного преобразователя и компенсатора постоянного тока, измеряющего ЭДС термопары, функционально связанной с переменным рабочим током Ip.
Прямоугольно-координатные компенсаторы имеют две рабочие цепи (электрические контуры), в которых угол фазового сдвига рабочих токов относительно друг друга составляет 90 . А измеряемая ЭДС (напряжение) уравновешивается напряжением, имеющим две составляющие, сдвинутые относительно друг друга на те же 90 .
отрицательной обратной связью по току.
Для этой схемы справедливы отношения:
Ux Uk U IRoc U , |
I US , |
||
где S – чувствительность усилителя. |
|
|
|
Из двух уравнений следует, что |
|
|
|
I |
UxS |
, |
|
1 R S |
|
||
|
oc |
|
|
т.е. между током на выходе усилителя I и измеряемым напряжением Ux существует пропорциональная зависимость, и по значению тока можно судить
об Ux.
Однако показания миллиамперметра зависят от чувствительности (S) усилителя, нестабильность которой приводит к появлению погрешности измерения. Если подобрать значения Roc и S таким образом, чтобы RocS>>1, обеспечив этим самым глубокую отрицательную обратную связь, стабилизирующую коэффициент преобразования усилителя, то получим I Ux / Rос . В этом случае коэффициент преобразования всей цепи определяется
только сопротивлением Roc, которое значительно стабильнее S усилителя. Основная приведенная погрешность таких автоматических компенсаторов
находится в пределах ±(0,25-1,0)%; время прохождения стрелочным указателем всей шкалы составляет единицы секунд.
Порог чувствительности составляет доли милливольта (по измеряемому напряжению).
3.7. ИЗМЕРИТЕЛИ ПАРАМЕТРОВ МАГНИТНЫХ ПОЛЕЙ
Измерение параметров магнитных полей и ферромагнитных материалов, являясь специфической областью измерений, в настоящее время выделилось в самостоятельную область прикладной метрологии, называемую магнитные измерения.
Магнитные измерения нашли применение в магнитной дефектоскопии, при измерении и контроле магнитных полей в установках атомной и ядерной физики, в биологии и в медицине.
МИЛЛИВЕБЕРМЕТРЫ
В этих приборах применяется магнитоэлектрическая система без противодействующего момента, являющаяся интегрирующим устройством, т.е. реагирующим на количество электричества. К такому прибору подключается измерительная катушка, которая выполняет роль преобразователя магнитной величины в ЭДС электромагнитной индукции (рис. 3.24).
84

По закону электромагнитной индукции, если измеряемый магнитный поток Ф сцеплен с катушкой, то в последней возникает ЭДС, определяемая формулой
е w к |
dФ |
, |
(3.9) |
|
dt |
||||
|
|
|
где wк - число витков измерительной катушки, помещенной в измеряемый поток.
Выражение 3.9 можно преобразовать к виду
dФ 1 edt . w K
В приборе осуществляется режим баллистического гальванометра, т.е. интегрирование:
t |
2 |
|
w |
|
t |
2 |
|
|
|
w |
|
t |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
dФ |
1 |
|
|
edt |
или Ф Ф(t |
2 ) Ф(t1 ) |
1 |
|
|
edt . |
(3.10) |
||
t |
1 |
|
K t |
1 |
|
|
1 |
||||||||
|
|
|
|
|
|
K t |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из этого выражения следует, что изменение потока за время Δt2-Δt1 определяется интегралом ЭДС в указанном временном интервале.
Для измерения постоянного магнитного потока
при помощи режима баллистического гальванометра, собирается
простая цепь, состоящая из измерительной катушки с числом витков wк и сопротивлением Rк. Измерительная катушка, помещенная в магнитный поток, быстро выносится из области измеряемого магнитного поля. Возникающий при этом импульс ЭДС уравновешивается падением напряжения в цепи: e=iR+L(di/dt), где i – мгновенное значение тока, R = Rк +
Rи – активное сопротивление цепи, L – ее индуктивность.
Учитывая операции, указанные в формулах 3.9 и 3.10, а также то,что ток i в момент времени t1 и t2 равен нулю и, допуская что R≈0, а L = const, получим
wкФ = ВSBWB∆α,
где Ф = Ф – изменение измеряемого потока за время от t1 до t2, В, sB, wB – соответственно индукция постоянного магнита, площадь и число витков рамки измерительного прибора.
Величина СВ = WBSBB – постоянная веберметра.
Окончательно можно записать:
wK Ф . CB
85

Из этого выражения видно, что изменение угла поворота внутренней рамки веберметра (абсолютное приращение числа делений) пропорционально изменению потока в измерительной катушке.
Применяют веберметры не только магнитоэлектрические, но и фотогальванические и электронные.
Верхние пределы измерений магнитоэлектрических веберметров от 0.5 до 10 мВб, электронных аналоговых – от 0,025 до 2,5 мВб, цифровых – от 0,1 до 0,01 мВб. Основная приведенная погрешность цифрового веберметра ± 0,5 %, а для остальных видов – ± (1,0; 1,5; 2,5; 4) %.
ТЕСЛАМЕРЫ С ПРЕОБРАЗОВАТЕЛЕМ ХОЛЛА
Тесламетр – магнитоизмерительный прибор (рис. 3.25), шкала которого градуируется в единицах магнитной индукции – Теслах. Измерительным преобразователем индукции в ЭДС в этих приборах является датчик Холла
(ДХ).
Преобразователь (ДХ) представляет собой пластину из полупроводникового кристалла, по которой протекает постоянный ток I от отдельного источника питания. При внесении пластины в магнитное поле, вектор магнитной индукции которого В перпендикулярен плоскости пластины, на ее боковых гранях возникает
|
разность потенциалов – ЭДС Холла: |
|||
|
|
Ех = CIB, |
|
|
|
где С – постоянная, зависящая от |
|||
|
свойств |
материала |
и |
размера |
|
пластины. |
|
|
|
|
После усиления усилителем (У) |
|||
|
ЭДС |
Холла |
измеряется |
|
Рис. 3.25. Функциональная схема |
милливольтметром |
|
или |
|
тесламеров с датчиками Холла |
компенсатором постоянного |
тока (§ |
||
|
||||
3.6, п.4), шкалы которых могут быть отградуированы в единицах магнитного потока при условии, что I=const. Тесламетры с преобразователями Холла просты в эксплуатации, позволяют измерять магнитную индукцию или напряженность постоянных, переменных и импульсных магнитных полей. Датчики Холла имеют малые размеры, что позволяет производить измерения индукции в малых пространствах, например, в зазорах электрических машин. Верхние пределы измерений тесламетров – от 2·10-3 до 2 Тл, основная приведенная погрешность – ±(1,5-2,5) %. К недостаткам следует отнести значительные температурные и частотные погрешности. Для калибровки применяют постоянные магниты, встроенные в корпус прибора.
86

3.8. ЦИФРОВАЯ ИЗМЕРИТЕЛЬНАЯ ТЕХНИКА
АНАЛОГОВО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ (АЦП)
АЦП – измерительные преобразователи, назначение которых состоит в автоматическом преобразовании измеряемой аналоговой величины в дискретную, представленную в виде цифрового кода. В соответствии с методом построения все АЦП можно разделить на три группы: с время-импульсным, с частотно-импульсным и поразрядным уравновешиванием. В качестве примера рассмотрим структурную схему время-импульсного АЦП, применяющегося в цифровых вольтметрах постоянного тока для преобразования постоянного напряжения в цифровой код (рис. 3.26).
Рис. 3.26. Структурная схема АЦП с времяимпульсным преобразованием
В момент поступления измеряемого напряжения Ux на вход преобразователя (в момент включения схемы АЦП), блок управления (БУ) запускает генератор линейновозрастающего напряжения (ГЛИН), генератор стабильных кратковременных импульсов
(ГСИ) и открывает электронный ключ (Кл).
Кратковременные импульсы с ГСИ начинают поступать на счетчик импульсов (Сч) до тех пор, пока компаратор (К) не закроет электронный ключ
(Кл).
Компаратор сравнивает Ux с линейно возрастающим напряжением Uк и в момент их равенства вырабатывает импульс, закрывающий электронный ключ, т.е. в этот момент прекращается доступ импульсов с генератора ГСИ.
Т.о., чем больше Ux, тем больше импульсов накапливается в счетчике импульсов. После окончания цикла преобразования Ux Nx блок управления списывает накопившиеся на счетчике импульсы (очищает его) и начинается следующий цикл преобразования. К недостатку такого метода следует отнести зависимость времени преобразования “ Ux Nx ” от величины измеряемого напряжения, т.е. требуется больше времени на операцию сравнения в компараторе. Общая приведенная погрешность рассмотренного типа АЦП составляет ~±0,1 %.
ЦИФРОВОЙ ЧАСТОМЕР С ВРЕМЯ-ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ
Принципы построения схем цифровых частотомеров такие же как и АЦП. Однако при измерении низких частот (не более сотен герц) применяют временно-импульсное преобразование измеряемой частоты в количество импульсов, при этом используется обратно пропорциональная зависимость частоты и периода (рис. 3.27).
87
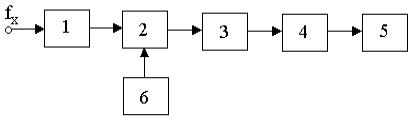
Напряжение неизвестной частоты fx подается на вход формирующего устройства (1), которое переменное напряжение произвольной формы
|
преобразует |
|
в |
|
|
импульсную |
|
|
последовательность |
с |
|
|
крутыми |
передними |
|
|
фронтами. |
Для |
этой |
|
цели |
применяют |
|
Рис. 3.27. Структурная схема цифрового частотомера с |
импульсные |
схемы. |
|
время-импульсным преобразованием |
Период |
импульсной |
|
|
последовательности |
||
сохраняется равным периоду измеряемого напряжения. Электронный ключ (2) открывается передним положительным фронтом и закрывается положительным фронтом второго импульса. Т.о. электронный ключ оказывается открытым в течение одного периода Тх. За время Тх от генератора стабильных кратковременных импульсов (6) на счетчик импульсов (3) поступает соответствующее длительности открытия ключа (2) число кратковременных импульсов. При этом очевидно, что число этих импульсов будет пропорционально периоду Тх, и обратно пропорционально измеряемой частоте:
N |
|
f |
T |
f0 |
, |
x |
|
||||
|
0 |
x |
fx |
|
|
|
|
|
|
|
где f0 – частота следования импульсов, генерируемая генератором стабильных импульсов (6). Поэтому, чем ниже частота, тем большее число импульсов пройдет на счетчик импульсов (3) и выше точность измерения частоты. Затем число импульсов Nx преобразуется в блоке (4) в десятичный код и подается на цифровое отсчетное устройство (5).
ЦИФРОВОЙ МУЛЬТИМЕТР
В основе принципа построения цифровых мультиметров, т.е. приборов, измеряющих различные физические величины (постоянные и переменные напряжения и токи, сопротивления, частоты, емкости конденсаторов и др.), лежит способ предварительного преобразования измеряемой величины в напряжение постоянного тока с дальнейшим использованием схемы цифрового вольтметра постоянного тока. Также, как и в АЦП, в цифровых мультиметрах используют время-импульсное или частотно-импульсное преобразование либо принцип поразрядного уравновешивания. Рассмотрим упрощенную структурную схему цифрового мультиметра с вольтметром постоянного напряжения, работающим на принципе время-импульсного преобразования
(рис. 3.28).
88

Рис. 3.28. Структурная схема цифрового мультиметра с времяимпульсным преобразованием
Прибор имеет четыре функции:
-измерение постоянных напряжений (переключатель ПР в положении
1);
-измерение переменных напряжений (переключатель в положении 2), при этом применяется специальная схема выпрямления напряжений
(10);
-измерение сопротивлений постоянному току, при этом сопротивление в блоке (11) преобразуется в напряжение постоянного тока;
-измерение емкости (переключатель в положении 4), при этом в блоке
(12) емкость должна преобразовываться в постоянное напряжение. Т.о. при измерении постоянных, переменных напряжений, сопротивлений
постоянному току и емкостей конденсаторов на вход формирующего устройства (1) подается напряжение постоянного тока, которое пропорционально измеряемой величине. Остальная часть схемы, состоящая из компаратора (2), электронного ключа (3), счетчика импульсов (4), генератора линейно возрастающего напряжения (7), генератора кратковременных стабильных импульсов (8) и блока управления (9), есть схема АЦП (см. п.1), преобразующая напряжение в количество импульсов. Элемент схемы 5 преобразует количество импульсов в десятичный код, значение которого подается на цифровое отсчетное устройство (6).
Достоинства мультиметров: многофункциональность, быстродействие, высокая точность, высокая помехозащищенность, удобство отсчета, т.к. результат измерения высвечивается в десятичной системе счисления, причем одновременно высвечиваются и единицы измерения, т.е. практически исключаются субъективные ошибки и промахи.
ИЗМЕРИТЕЛЬНЫЕ ИНФОРМАЦИОННЫЕ СИСТЕМЫ
Система объединяет множество приборов и преобразователей, каждый из которых выполняет свои функции. При этом она представляет собой не просто
89
сумму независимых приборов, а их объединение, участвующее совместно в выполнении некоторой сложной функции или ряда функций. Причем для системы характерно автоматическое выполнение всех функций, начиная от сбора, накопления информации и заканчивая ее отображением или вводом в
ЭВМ. Системы, которые предназначены для получения и обработки измерительной информации, получили название измерительных информационных систем (ИИС). Существует несколько разновидностей ИИС.
Измерительные системы. Их функции состоят в получении количественной информации о значении физических величин путем прямых, совокупных или косвенных измерений.
Системы автоматического контроля (САК). Предназначены для автоматического управления качеством продукции, профилактики брака и его предотвращения.
Основные функции этих систем:
-измерение и контроль за текущими параметрами объекта и сравнение с нормами на параметры заготовок, деталей, узлов и готовых изделий в целом;
-контроль и диагностика состояния инструментов;
-учет времени работы инструмента и производственного оборудования;
-формирование данных для коррекции производственных операций с помощью управляющих программ;
-контроль за удалением технологических отходов.
САК по месту установки делятся на две группы: системы выносного и встроенного контроля.
К первым относят системы, с помощью которых контрольные операции выполняются вне производственного оборудования. К ним относятся измерительные машины и измерительные роботы, которые устанавливаются на постах контроля или в измерительных лабораториях. Недостатки: необходимость транспортировки изделий между технологическим оборудованием, между САК и складами готовой продукции. Достоинства: обеспечивают высокую точность измерения. Например, погрешность современных измерительных машин геометрических размеров не превышает десятых долей микрона. Кроме этого такие машины самокалибрующиеся.
Встроенные САК выполняют контрольные операции по ходу технологического процесса, т.к. чувствительные элементы (датчики) и приспособления (штоки, щупы) устанавливаются на технологическом оборудовании. Такие САК называют системами активного контроля, вырабатывающие сигналы подналадки. Наиболее эффективными встроенными САК являются системы адаптивного контроля.
Системы технической диагностики и прогнозирования (СТДиП). Их функции состоят в контроле состояния различных объектов, с целью обнаружения их отказов и определения неисправных элементов и узлов. Для
90