

17. Предохранители винтовых прессов
В современных конструкциях винтовых фрикционных, электровинтовых и гидровинтовых прессов применяют предохранитель, с помощью которого маховик соединяется с винтом. Обычно это фрикционный предохранитель.

Рис. 71. Фрикционный предохранитель винтовых прессов:
а — схема; б — расчетная схема; 1 — винт; 2—ступица; 3 — фланец; 4, 5 —фрикционные накладки; 6 — маховик;
7 — болт; 8 — пружина
Момент затяжки:
![]() ,
(242)
,
(242)
где z - число поверхностей трения;
s - площадь поверхности трения;
f - коэффициент трения.
 - приведенный
радиус трения.
- приведенный
радиус трения.
![]() - удельное и
допустимое усилие фрикционного материала.
- удельное и
допустимое усилие фрикционного материала.
Для стабильной работы фрикционного предохранителя обычно q = 0,6 0,7 мПа.
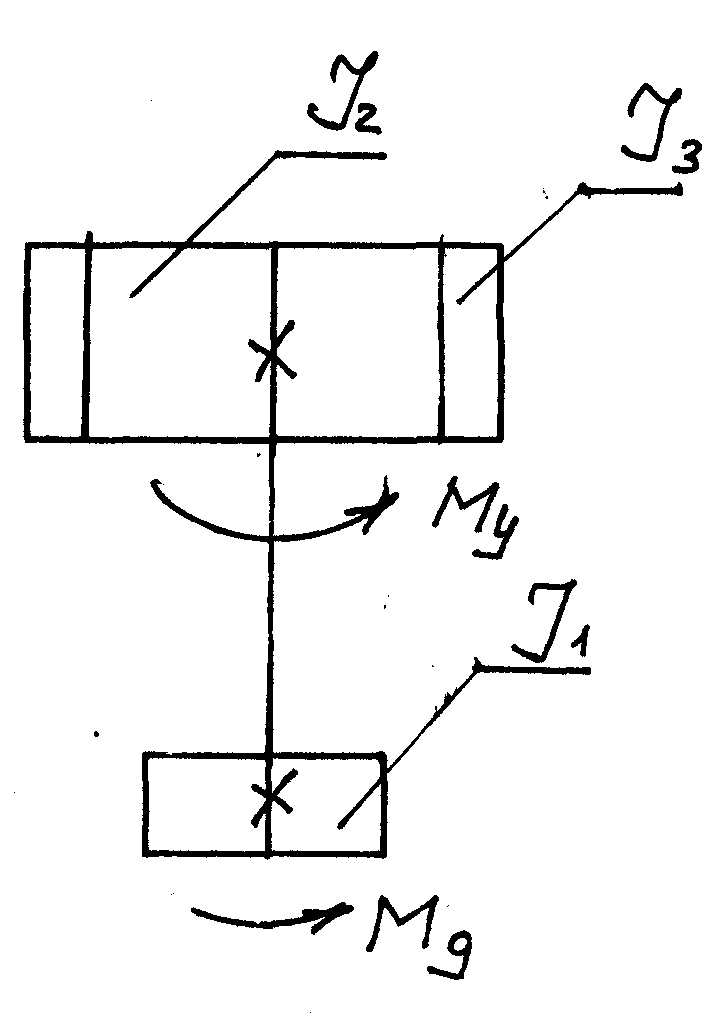
Рис. 72.
Систему винтового механизма представим в виде динамической модели (рис. 72).
![]() - приведенный
момент инерции ползуна и верхней половины
штампа,
- приведенный
момент инерции ползуна и верхней половины
штампа,
где Y2 - момент инерции винта со ступицей;
Y3 - момент инерции обода.
Во время разгона ползуна на массы Y2, Y3 и Y4 действует крутящий момент, который расходуется на трение и относительно невелик, поэтому массы Y2, Y3 движутся совместно. При совершении рабочего хода на массу Y1 действует момент сопротивления Мg и угловая скорость вращения этой массы уменьшается, в то время как массы Y2, Y3 стремятся сохранить угловую скорость. В результате винт испытывает упругий крутящий момент. Как только упругий крутящий момент достигнет величины, при которой возможно срабатывание фрикционного предохранителя начнется проскальзывание массы Y3 относительно массы Y2.
Рассмотрим движение масс до срабатывания предохранителя.
На массу Y1 действует упругий момент Му и момент сопротивления Мg:
![]() .
(243)
.
(243)
Упругий момент:
![]() ,
(244)
,
(244)
где Су - крутильная жесткость винта. на массы Y2 и Y3 действует упругий момент Му.
![]() .
(245)
.
(245)
Учитывая, что
![]() ,
(246)
,
(246)
можно получить:
 .
(247)
.
(247)
Для момента сопротивления можно принять (для случая холодного удара):
![]() .
(248)
.
(248)
![]() ,
(249)
,
(249)
где tgср - 0,05 0,1 - время деформирования;
- 1,5 1,6 - коэффициент запаса;
Рн - номинальное усилие пресса;
t - время упругой реакции станины и фундамента.
После подстановки получим:
![]() .
(250)
.
(250)
Обозначим
 ,
(251)
,
(251)
![]() .
(252)
.
(252)
При t = tg предохранитель должен сработать и тогда
![]() ,
(253)
,
(253)
 .
(254)
.
(254)
Учитывая, что![]() ,
,
 .
(255)
.
(255)
18. Электровинтовые прессы
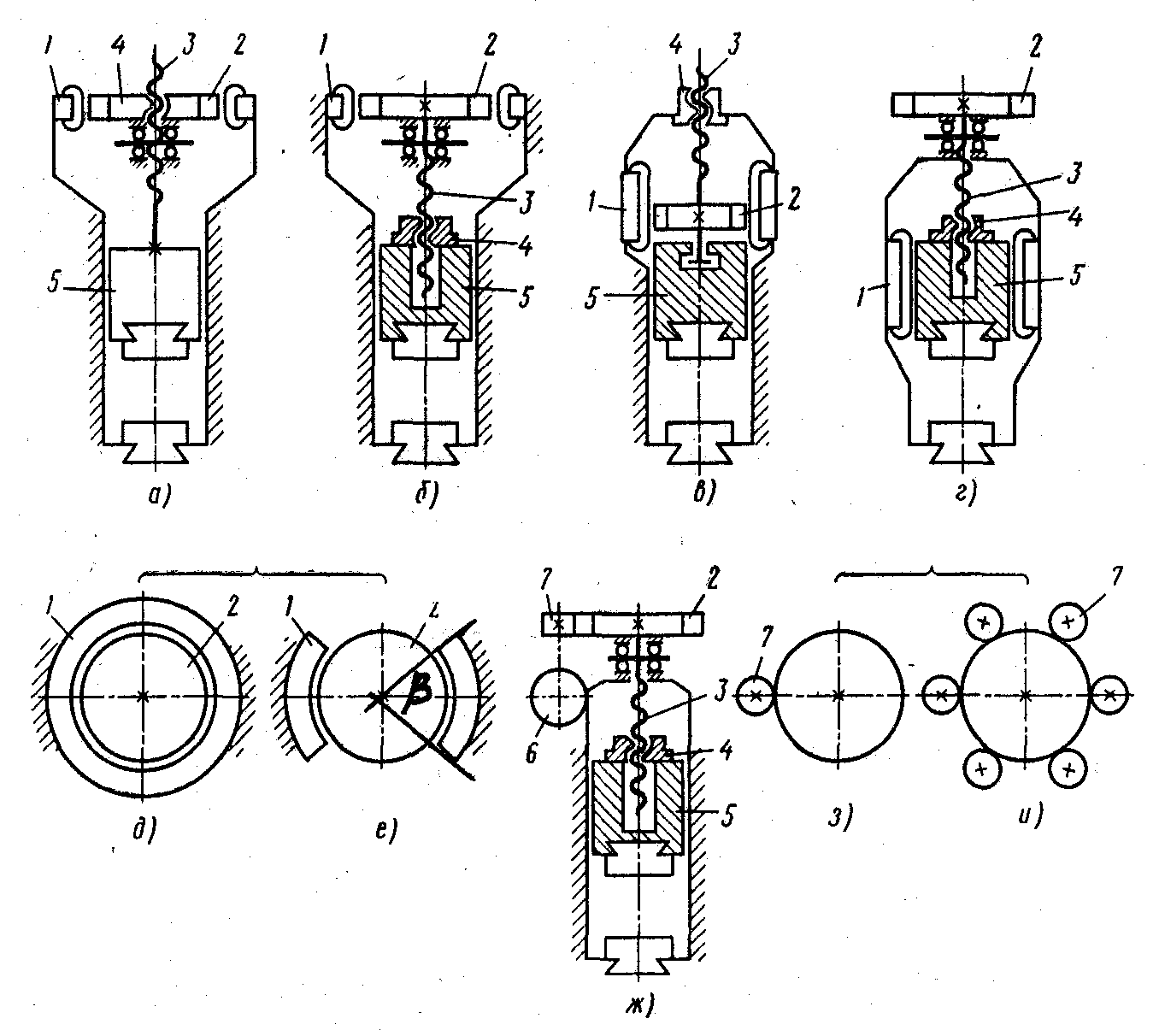
Рис. 73. Конструктивные схемы электровинтовых прессов:
а — д — с круговым статором; е — с дуговым статором; ж—и —с электромеханическим приводом: 1 — статор;
2 — ротор (маховик); 3 — винт; 4 — гайка; 5 — ползун;
6 — электродвигатель; 7 — зубчатая передача
Разгон маховика - ротора осуществляется силами бегущего электромагнитного поля в статоре, который может быть круговым или дуговым. Для увеличения скольжения двигателя на роторе выполнены пазы. Ротор установлен в статоре с зазором, учитывающим радиальное биение, упругую деформацию от центростремительных сил, нагрев. Обычно зазор
Δ = 4,5 мм.
В процессе кинематического цикла электродвигатель включается дважды. Вначале при ходе вниз. При подходе к КНП он отключается. Затем после рабочего хода переключается на противоположное вращение магнитного поля и совершается ход вверх. Моменты переключений сопровождаются пиковыми нагрузками в электросети. Энергия удара может регулироваться за счет изменения времени разгона. В конце хода вверх срабатывает тормоз, удерживающий ползун.
Номинальный режим работы электродвигателя получается только в конце разгона во время хода вниз. Скольжение при этом изменяется от 100 % при трогании до 15 - 20 % в конце разгона.
Угловая скорость магнитного поля в статоре:
![]() ,
(256)
,
(256)
где
![]() - частота тока;
- частота тока;
- угол охвата статора;
Nп - число пар полюсов.
Линейная скорость магнитного потока вдоль поверхности статора.
![]() ,
(257)
,
(257)
где rc - внутренний радиус статора.
Наружный диаметр статора:
![]() ,
(258)
,
(258)
где
![]() - зазор.
- зазор.
Если необходимо получить максимальную скорость на ползуне Vм, то надо разогнать ротор до номинальных оборотов н.
![]() .
.
Требуемая угловая скорость магнитного поля в статоре:
![]() ,
(259)
,
(259)
где = 0,12 0,2 - номинальное скольжение в электродвигателе.
Число пар полюсов в двигателе с круговым статором:
![]() .
(260)
.
(260)
Для двигателя с дуговым статором:
![]() .
(261)
.
(261)
Заданная кинетическая энергия:
![]() ,
(262)
,
(262)
где Мн - средний крутящий момент от электродвигателя;
- момент создаваемый силой тяжести
движущихся масс;
р - угловое перемещение ротора;
![]() - к.п.д. винтового
механизма
- к.п.д. винтового
механизма
![]() - угол трения
скольжения.
- угол трения
скольжения.
Угол поворота маховика, необходимый для его разгона:
![]() ,
(263)
,
(263)
где
![]() и
и
![]() - углы поворота маховика при полном ходе
ползуна и при деформировании поковки.
- углы поворота маховика при полном ходе
ползуна и при деформировании поковки.
![]() и
и
![]() соответствующие линейные перемещения.
соответствующие линейные перемещения.
Обычно
![]() ,
,
где к = 0,6 0,7
С учетом изложенного:
![]() .
(264)
.
(264)
Величина
![]() и им можно пренебречь.
и им можно пренебречь.
Если при проектировании на основе технологических требований задана наибольшая скорость поступательного движения ползуна:
![]() м/сек,
м/сек,
то
 .
(265)
.
(265)
Размеры маховика:
![]() ,
(266)
,
(266)
где Н - высота обода.
Средний крутящий момент во время возвратного хода ползуна:
![]() ,
(267)
,
(267)
где В = 0,8М.
Момент сопротивления во время хода вверх:
![]() ,
(268)
,
(268)
где dс - средний диаметр резьбы.
![]() ,
(269)
,
(269)
где Д0 - средний диаметр дорожки качения шариков в подшипнике;
d - диаметр шарика;
Электродвигатель выбирается по наибольшему моменту.
Обычно
![]() .
.
Мощность электродвигателя:
![]() .
(270)
.
(270)
Пусковой момент:
![]() .
(271)
.
(271)
Активная поверхность статора:
![]() .
(272)
.
(272)
где к = 1 для кругового статора;
к = 2 для статора дугового;
рэ = 20 вт/см2 - удельная электромагнитная мощность;
![]() = 0,15
0,17 суммарные относительные потери
мощности в роторе.
= 0,15
0,17 суммарные относительные потери
мощности в роторе.
Высота статора:
![]() .
(273)
.
(273)
Полюсной шаг:
![]() .
(274)
.
(274)
18.1. Анализ параметров движения рабочих частей электровинтового пресса
18.1.1 Ход вниз.
Разгон ротора - маховика и подвижных частей производится в два этапа. Сначала ротор разгоняется бегущим магнитным полем, а затем после отключения двигателя за счет сил тяжести вниз.
Уравнение движения вниз:
![]() ,
(275)
,
(275)
где Мэ - активный крутящий момент электродвигателя; МG - момент под действием сил тяжести;
Мс - момент сопротивления.
![]() ,
(276)
,
(276)
где М1 - в резьбе;
М2 - в подшипнике;
М3 - в направляющих.
Крутящий момент электродвигателя может быть выражен зависимостью:
 ,
(277)
,
(277)
где Мп - пусковой момент;
М1 = 0,25 мП пусковой момент в конце разгона;
- угловая скорость в конце разгона.
Подставляя значения из Мэ, МG, М3, М5 в уравнение движения получим:
![]() ,
(278)
,
(278)
![]() ,
(279)
,
(279)
где
![]() .
.
![]() ,
(280)
,
(280)
![]() ,
(281)
,
(281)
Уравнение движения может быть записано:
 - табличный интеграл.
(282)
- табличный интеграл.
(282)
Решение интеграла:
 .
(283)
.
(283)
Для определения С берут граничные условия при t = 0, тогда:
 .
(284)
.
(284)
С увеличением
времени угловая скорость ротора
повышается, приближаясь к установленному
значению, которое получается при
![]() :
:
![]() .
(285)
.
(285)
Линейная скорость ползуна в функции от времени:
![]() .
(286)
.
(286)
Введем это в уравнение движения, и после разделения переменных и интегрирования получим зависимость линейной скорости ползуна в функции от перемещения:
![]() ,
(287)
,
(287)
 .
(288)
.
(288)
Время разгона маховика до угловой скорости w1:
 .
(289)
.
(289)
Ускорение ползуна
можно найти, подставив в исходное
уравнение
![]() :
:
![]() .
(290)
.
(290)
Наиболее интенсивный разгон происходит в интервале
= 0 1. Далее (t = t1) двигатель отключается, и разгон происходит под действием момента МG. При этом
![]() .
(291)
.
(291)
Угловая скорость на втором участке:
![]() .
(292)
.
(292)
Конечное значение этой угловой скорости должно соответствовать заданной кинетической энергии:
![]() .
(293)
.
(293)
Время движения на втором участке:
![]() .
(294)
.
(294)
Полное время движения вниз:
![]() .
(295)
.
(295)
Угловое перемещение:
![]() .
(296)
.
(296)
Путь ползуна:
![]() .
(297)
.
(297)
18.1.2. Рабочий ход
Перед рабочим ходом электродвигатель должен быть отключен. Поковка деформируется за счет кинетической энергии рабочих частей.
18.1.3. Ход подвижных частей вверх
При ходе вверх маховик сначала разгоняется электродвигателем до угловой скорости w3, а затем двигатель отключается, и маховик продолжает движение по инерции. В это время угловая скорость маховика понижается под действием момента сопротивления, затем он останавливается тормозом.
Уравнение движения рабочих частей:
![]() .
(298)
.
(298)
Значения Мэ, МG, МС аналогичны тем, которые использовались при оценке хода вниз.
Аналогично получим:
![]() ,
(299)
,
(299)
![]() ,
(300)
,
(300)
![]() ,
(301)
,
(301)
![]() .
(302)
.
(302)
По аналогии с предыдущим получим:
Время разгона маховика до угловой скорости w3:
 .
(303)
.
(303)
Путь ползуна:
 .
(304)
.
(304)
При отключении электродвигателя имеем движение с постоянным замедлением:
![]() .
(305)
.
(305)
Угловая скорость на этом участке:
![]() .
(306)
.
(306)
Время движения маховика с выключенным электродвигателем до полной остановки w4 = 0:
![]() .
(307)
.
(307)
При выключенном тормозе уравнение движения имеет вид:
![]() .
(308)
.
(308)
Интегрируя в пределах t = 0, w = w4 получим:
![]() .
(309)
.
(309)
Время торможения:
![]() .
(310)
.
(310)
Необходимый момент торможения:
![]() .
(311)
.
(311)
Полное время машинного цикла:
![]() ,
(312)
,
(312)
где t0 - время на остановку ползуна в конце операции.
Число ходов пресса:
![]() ,
(313)
,
(313)
где tт - пауза между ходами.
18.2. к.п.д. электровинтового пресса
В электровинтовых прессах двигатель в течение цикла два раза включается в сеть и угловая скорость ротора от нулевой достигает заданной. Поэтому в двигателе имеют место пусковые потери электроэнергии.
В конце разгона при t = tp ротор - маховик запасает полную кинетическую энергию.
![]() .
(314)
.
(314)
При этом в результате изменения скольжения в роторе будет потеряна энергия:
![]() .
(315)
.
(315)
Кроме того, имеют
место потери энергии в статорной обмотке
![]() и постоянные потери
и постоянные потери
![]() .
.
Цикловой электромеханический к.п.д. пресса:
![]() %. (316)
%. (316)
С учетом рабочего хода к.п.д. равен 13 20 %.