

13. Приводные молоты
Классификация приводных молотов:
а) электроприводные:
- с доской;
- с ремнем;
- рессорные.
б) пневматические:
- простого действия;
- двойного действия.
Наибольшее применение к настоящему времени нашли пневматические двухцилиндровые молоты двухстороннего действия.
13.1. Пневматические ковочные молоты
Вес шабота молотов равен 12 кратному весу падающих частей. Шабот не связан жестко со станиной и фиксируется относительно нее деревянными клиньями, поэтому на молотах, возможно, выполнять только операции ковки. В работе молота используется энергия электропривода, а воздух играет роль упругого звена, передающего движение от поршня компрессора к рабочему поршню.
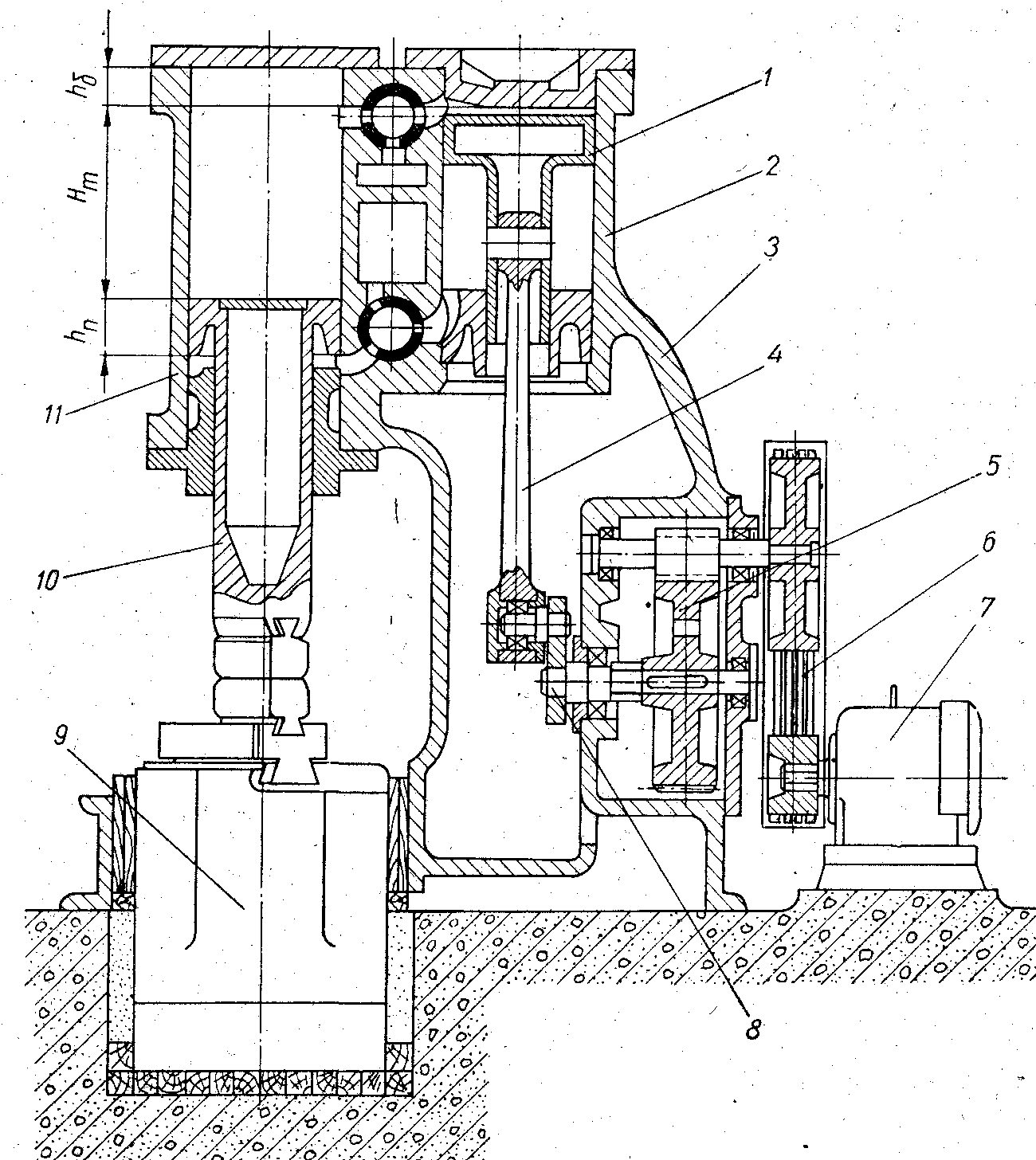
Рис. 47.
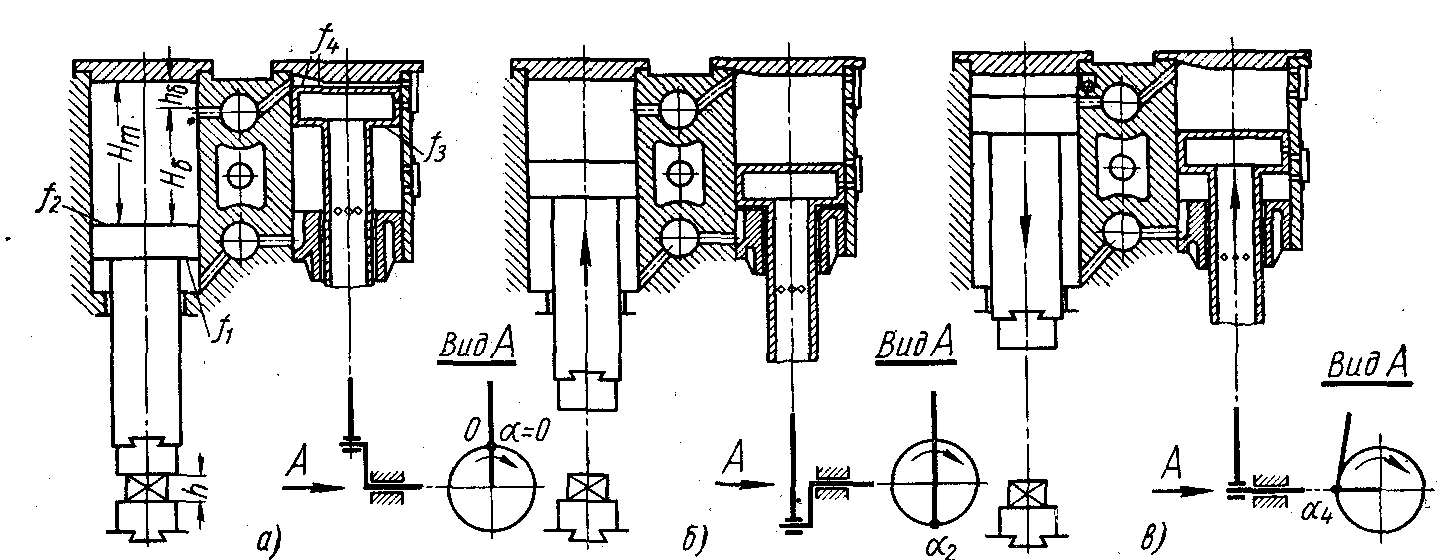
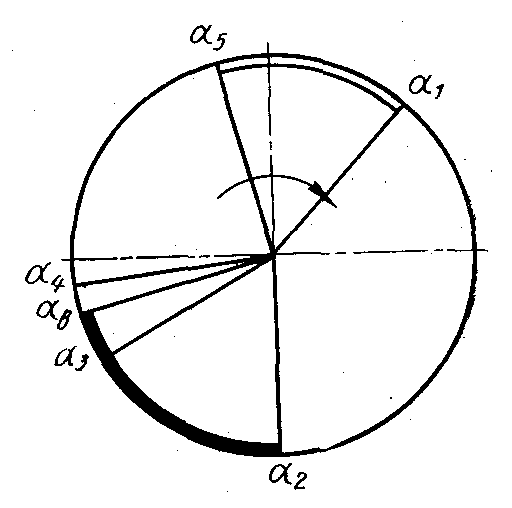
Рис. 48. Фазы движения подвижных частей пневматического молота
а) начальное положение. Поршень компрессора находится в КВП. Рабочий поршень - на поковке. Верхняя и нижняя полости компрессора и рабочего цилиндров соединены с атмосферой.
При движении вниз в нижних полостях давление увеличивается, в верхних уменьшается - разрежение. В отдельный момент при 40 рабочий поршень отрывается от поковки и идет вверх.
б) При 2 180 поршень компрессора в КНП и верхняя полость его соединяется с атмосферой. Рабочий поршень продолжает движение вверх и при 3 250 закрывает верхний канал с адиабатическим сжатием объема воздуха в буферной зоне (Vб). Это приводит к остановке рабочего поршня и началу его движения вниз. В момент, когда давления в цилиндрах сравняются сработает обратный клапан. Угол поворота при этом 3 250 .
в) Рабочий поршень, испытывая нарастающее давление из верхней полости компрессорного цилиндра, идет вниз и при 3 350 происходит удар. При этом поршень остается внизу = 1. Поэтому удар пневматического ковочного молота называют прилипающим.
13.1.1. Индикаторные диаграммы к.п.д. молота
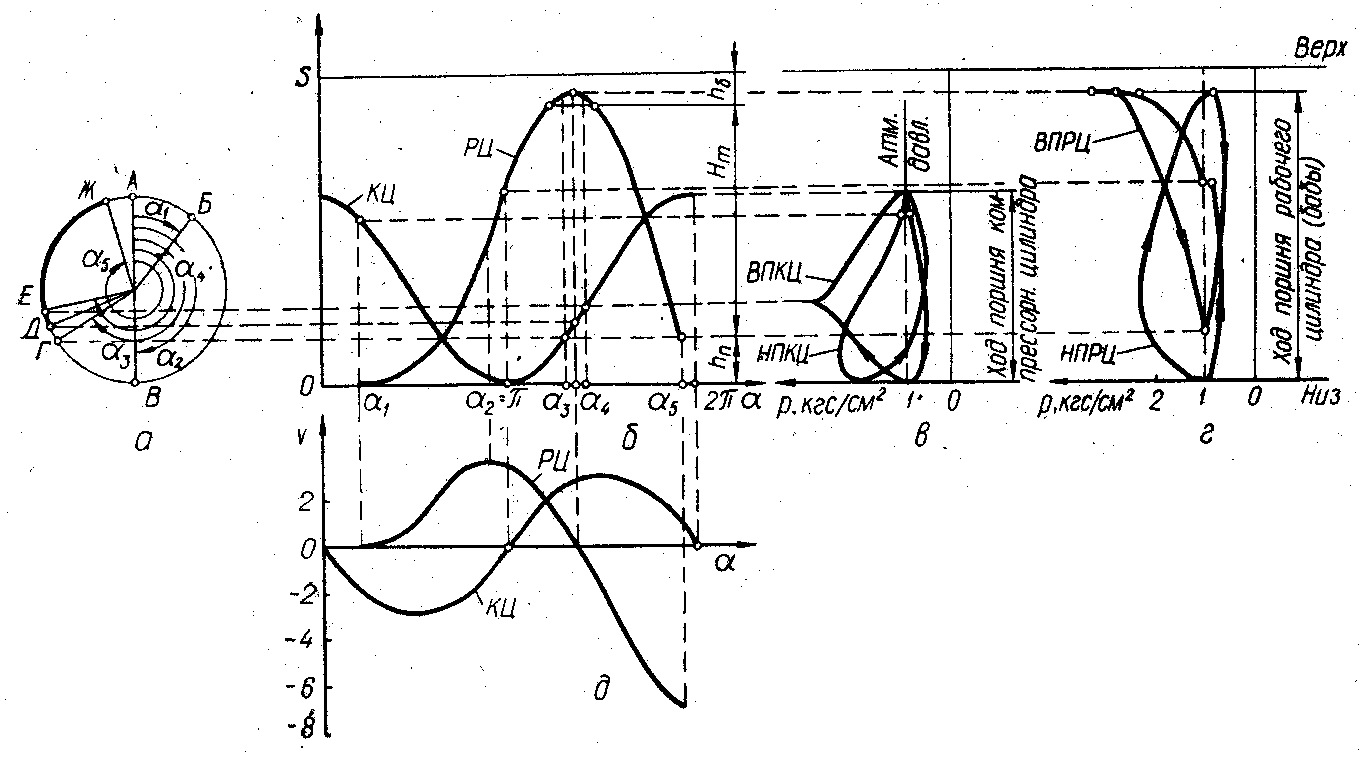
Рис. 49. Индикаторные диаграммы
![]() - индикаторная
работа, (144)
- индикаторная
работа, (144)
где F - площадь индикаторной диаграммы (рис. 49 в, г);
![]() - масштабы графиков
по ходу и давлению.
- масштабы графиков
по ходу и давлению.
Индикаторные работы воздуха в рабочем и компрессорном цилиндре:
![]() ,
,
(145)
![]() ,
,
где
![]() ,
,
![]() - работа воздуха в нижней полости рабочего
- работа воздуха в нижней полости рабочего
и компрессорного цилиндра;
![]() ,
,
![]() - работа воздуха в верхней полости
рабочего
- работа воздуха в верхней полости
рабочего
и компрессорного цилиндра.
Относительный индикаторный к.п.д. 0,85 0,95 характеризует потери энергии воздуха при перетекании его из компрессорного цилиндра в рабочий:
![]() .
(146)
.
(146)
![]() - механический
к.п.д. рабочего цилиндра,
- механический
к.п.д. рабочего цилиндра,
![]() - механический
к.п.д. компрессорного цилиндра,
- механический
к.п.д. компрессорного цилиндра,
где Lдв - энергия электродвигателя, подведенная к кривошипному валу,
![]() - механический
к.п.д молота.
- механический
к.п.д молота.
Если учесть все потери от выработки электроэнергии, ее передачи, работы электродвигателя и т.д., то полный к.п.д. или экономический к.п.д. 0,05 0,06. Для паровоздушных молотов к.п.д. 0,01 0,06.
13.1.2. Расчет пневматических молотов
При расчете пневматических молотов динамика движения рабочих частей машины разбивается на 5 этапов за время одного оборота компрессора (рис. 48).
0 - 1 - падающие части неподвижны до момента отрыва.
1 - 2 - подъем рабочего поршня с момента отрыва бойка от поковки до момента соединения верхней полости компрессорного цилиндра с атмосферой.
2 - 3 - подъем рабочего поршня до момента включения буфера.
3 - 4 - подъем и последующее движение вниз до момента выхода из буфера.
4 - 5 - движение вниз до момента удара.
Уравнение движения падающих частей для всех участков хода:
![]() ,
(147)
,
(147)
где Р1, Р2 - абсолютное давление воздуха в нижней и верхней полостях рабочего цилиндра;
f1, f2, - площади поршня в нижней и верхней полостях рабочего цилиндра;
Р0 - атмосферное давление 0,1 мПа.
= 1,1 при движении вверх;
= - 0,9 - при движении вниз;
= 1 - при неподвижном состоянии.
Для участка 0 - уравнение равновесия:
![]() .
(148)
.
(148)
Текущий объем нижних и верхних полостей обоих цилиндров:
![]() ,
(149)
,
(149)
![]() ,
,
где V01, V02 - нижний и верхний начальные объемы, включая объемы каналов рабочего и компрессора;
s - путь поршня компрессора;
f1, f2 - нижняя и верхняя площади рабочего поршня;
f3, f4, - нижняя и верхняя площади компрессорного цилиндра.
Текущее давление в нижней и верхней полостях изменяются по политропе:
 ,
(150)
,
(150)
 .
(151)
.
(151)
После подстановки в уравнение движения получаем зависимости которые с целью упрощения выражения для Р1, Р2 - разлагает в биноминальный ряд:
![]()
![]() ,
(152)
,
(152)
тогда
 ,
(153)
,
(153)
![]() ,
,
 .
(154)
.
(154)
После подстановки в уравнение движения, например, для хода вверх, получим:
 .
(155)
.
(155)
Ход поршня компрессора от кривошипно-шатунного механизма:
![]() .
(156)
.
(156)
После подстановки и преобразования получим:
![]() ,
(157)
,
(157)
где
 ,
(158)
,
(158)
![]() ,
(159)
,
(159)
 .
(160)
.
(160)
Это уравнение есть частный случай общего линейного неоднородного дифференциального уравнения колебательного движения второго порядка вида:
![]() ,
(161)
,
(161)
где
![]() - сопротивление среды или сил трения;
- сопротивление среды или сил трения;
р2х - внутренние силы системы, стремящиеся вернуть ее в состояние равновесия;
р - частота собственных колебаний системы;
f(t) - свободный член, представляющий собой внешнюю возмущающую силу, действующую на систему.
Для данного случая возмущающая сила создается движением компрессорного поршня с частотой .
![]() ,
(162)
,
(162)
где = wt,
w - угловая скорость вращения кривошипа.
Частота собственных колебаний определяется по формуле:
 .
(163)
.
(163)
Условие резонанса, когда р = . В этом случае достигается максимальная скорость движения рабочего поршня и, следовательно, максимальная кинетическая энергия при ударе.
Полученные зависимости позволяют определить скорость падающих частей в момент удара, и соответственно эффективную энергию удара, построить индикаторные диаграммы давления воздуха для рабочего и компрессорного цилиндров.
По индикаторным диаграммам компрессорного цилиндра определяются силы, действующие на поршень компрессора в любой момент угла поворота кривошипного вала. Далее строится график изменения крутящихся моментов от угла поворота (по аналогии с расчетом для кривошипных прессов) за двойной ход поршня (рис. 50).
![]() ,
,
![]() ,
,
![]() ,
(164)
,
(164)
где
![]() - к.п.д. компрессора.
- к.п.д. компрессора.
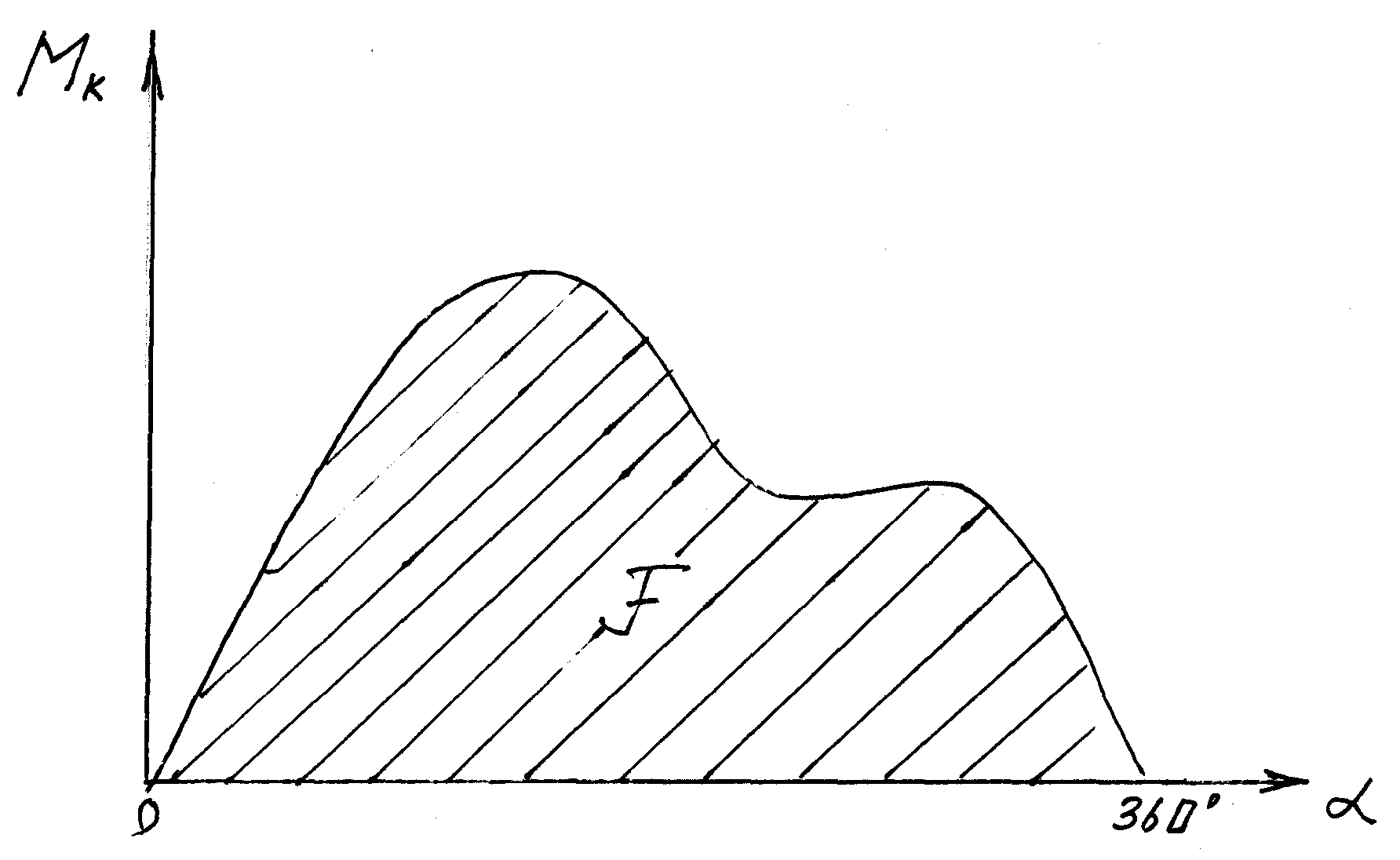
Рис. 50.
При проектировочном расчете по ГОСТу задаются величины: G = вес падающих частей в кн, наибольшее число ударов в мин. Энергия удара в кдж. Размеры зеркала бойка. вылет станин и высота рабочей зоны.
Ориентировочно можно принять:
![]() (мм) - монтажный
ход бабы;
(мм) - монтажный
ход бабы;
![]() - радиус кривошипа
компрессора;
- радиус кривошипа
компрессора;
![]() - длина шатуна;
- длина шатуна;
![]() - диаметр рабочего
штока;
- диаметр рабочего
штока;
![]() - нижняя кольцевая
площадь;
- нижняя кольцевая
площадь;
![]() - верхняя площадь
рабочего цилиндра.
- верхняя площадь
рабочего цилиндра.
![]() ;
;
![]() ;
;
![]()
Последующим расчетам конструктивные параметры корректируются.
13.1.3. Режимы работы и воздухораспределение
пневматических молотов
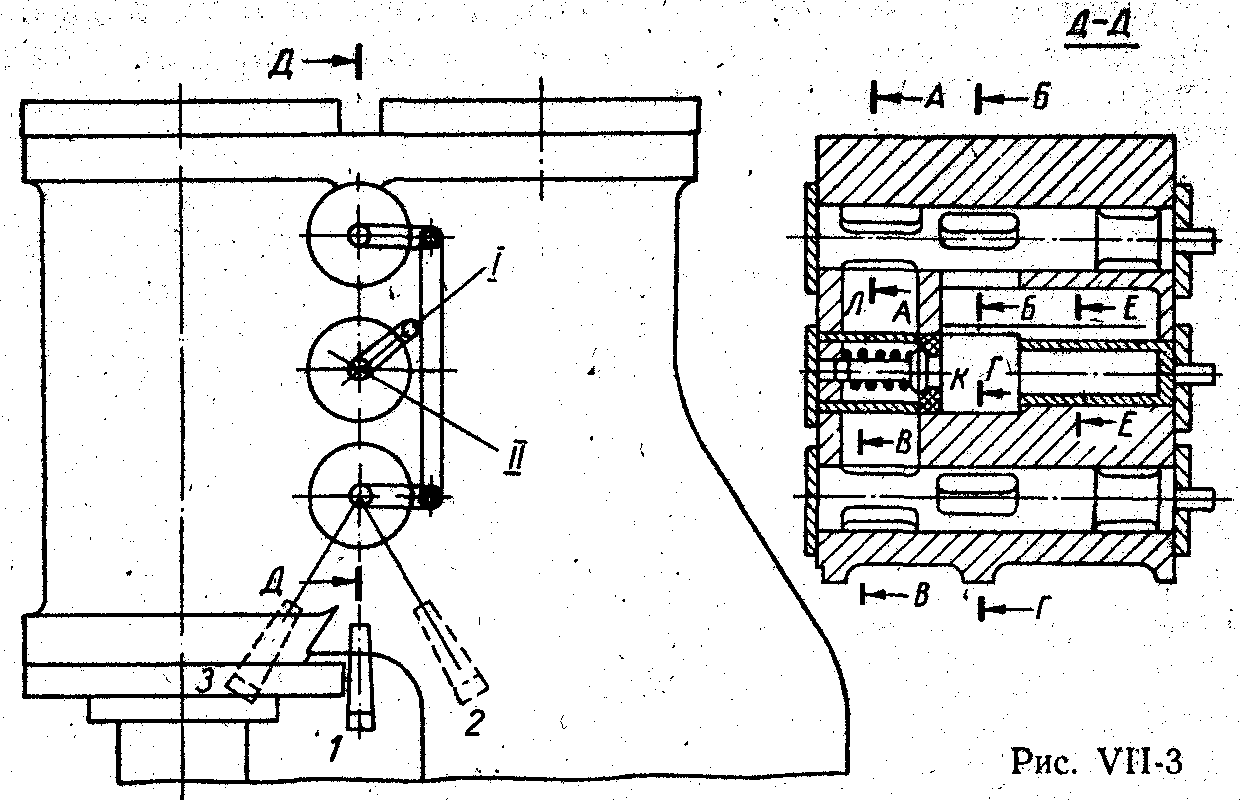
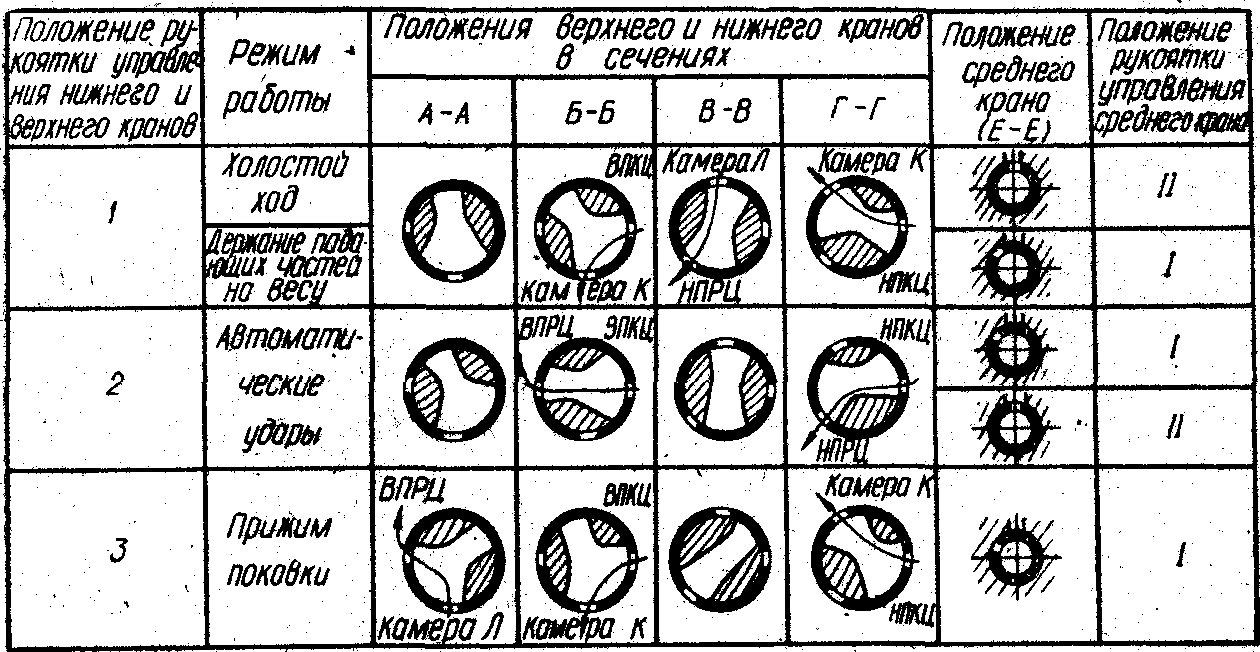
Рис. 51. Схема управления
Пневматические молоты могут осуществлять следующие режимы работы:
1. автоматические последовательные удары;
2. Удерживание на весу;
3. Прижим поковки;
4. Холостой ход.
Механизм воздухораспределения, состоящий из трех горизонтальных кранов - верхнего, среднего, нижнего. Верхний и нижний управляют работой молота, а средний переводит компрессор на холостой ход. Между верхним и нижним кранами имеется камера с обратным клапаном.
1. автоматические последовательные удары - краны соединяют верхние и нижние полости рабочего и компрессорного цилиндров попарно между собой. Молот будет совершать число ударов в минуту, равное количеству оборотов вала компрессора.
Величина энергии удара зависит от полноты открытия кранов, то есть от степени дросселирования воздуха.
2. Удерживание на весу - воздух из нижней полости компрессорного цилиндра подается в нижнюю полость рабочего через обратный клапан поэтому, когда поршень компрессора идет вверх, в рабочей нижней полости сохраняется давление подкачки. Верхние полости компрессора и рабочего цилиндра соединены с атмосферой.
3. прижим - воздух в верхнюю полость рабочего цилиндра поступает из нижней полости компрессорного. Нижняя полость рабочего цилиндра и верхняя компрессорного цилиндра соединены с атмосферой.
4. холостой ход - чтобы не перегревать компрессор в период длительных пауз, обе полости компрессора соединены с атмосферой.