

4.2.1.2. Приложение расклинивающей силы к кривошипу
В данном случае задача определения величины расклинивающей силы при α=0 аналогична предыдущей (схема сил и моментов показана на рис. 4.10).
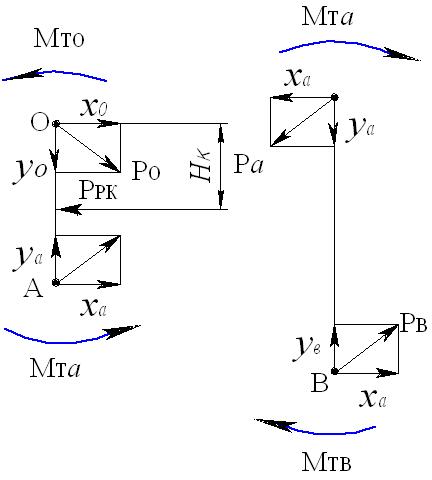
Рис. 4.10. Схема сил и моментов, действующих на элементы
кривошипно-шатунного механизма, при приложении
расклинивающей силы к кривошипу
Условия равновесия элементов расчлененного кривошипно-шатунного механизма (рис. 4.10. а и 4.10.б) следующие:
для кривошипа
![]() ;
(4.29)
;
(4.29)
![]() ;
(4.30)
;
(4.30)
![]() ;
(4.31)
;
(4.31)
для шатуна
![]() ;
(4.32)
;
(4.32)
![]() ;
(4.33)
;
(4.33)
![]() .
(4.34)
.
(4.34)
На рис. 4.10, кроме принятых ранее обозначений, Нк – плечо силы Ррк на кривошипе, равное наименьшему расстоянию от её линии действия до оси кривошипа (точка О). При этом Нк может быть как больше, так и меньше R.
В результате рассмотрения формул (4.32 – 4.34) определяем, что
![]() ,
(4.35)
,
(4.35)
где:
![]() .
(4.36)
.
(4.36)
Учитывая значение ха, выраженное формулой (4.35), при решении уравнений (4.29 – 4.31), находим
![]() ,
(4.37)
,
(4.37)
где
 ;
(4.38)
;
(4.38)
 .
(4.39)
.
(4.39)
Как и в предыдущем
случае, полученные формулы могут быть
значительно упрощены. Учитывая, что
![]() и
и
![]() ,
для
,
для
![]() ,
получим
,
получим
![]() .
(4.40)
.
(4.40)
Как показывают
расчеты, для случаев
![]() погрешность
вычисления по формуле (4.40) не более 5%.
погрешность
вычисления по формуле (4.40) не более 5%.
Формулы для вычисления расклинивающей силы Ррк, прикладываемой к кривошипу с одновременным включением муфты при разогнанном приводе, могут быть получены следующим образом.
Условие равновесия кривошипа (4.31) для данного случая запишется
![]() .
(4.41)
.
(4.41)
Решая это уравнение
с учетом формул (4.29) и (4.35) относительно
![]() ,
получим
,
получим
![]() ,
(4.42)
,
(4.42)
где
 ;
(4.43)
;
(4.43)
 . (4.44)
. (4.44)
Упрощенная формула для определения , получаемая при допущениях, принятых при выводе формулы (4.40), имеет вид
![]() .
(4.45)
.
(4.45)
4.2.1.3. Приложение расклинивающей силы к рычагу
Асимметричное приложение Ррр по отношению к опорам кривошипного вала несколько усложняет задачу по сравнению с предыдущими.
Для решения её также расчленим кривошипно-шатунный механизм на части (рис.4.11) и составим условие равенства действующих на кривошипном валу моментов относительно его оси (4.11.а) при α=0.
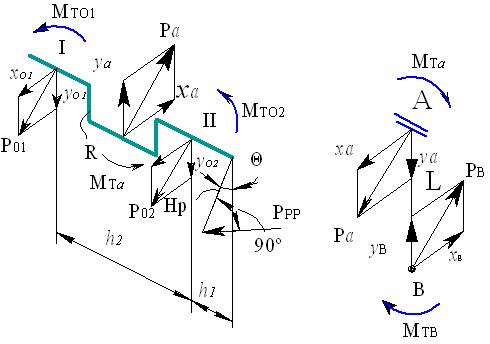
Рис. 4.11. Схема сил и моментов, действующих на элементы
кривошипно-шатунного механизма, при приложении
расклинивающей силы к рычагу на кривошипном валу
Это условие может быть представлено в следующем виде
![]() ,
(4.46)
,
(4.46)
где, кроме принятых ранее обозначений:
Нр – длина рычага;
МТО![]() ,
МТО
,
МТО![]() – моменты
трения в опорах I
и II
кривошипного вала.
– моменты
трения в опорах I
и II
кривошипного вала.
Уравнение (4.46) является основным для определения величины Ррр.
Величины ха и МТа, входящие в уравнение (4.46), могут быть определены, исходя из условий равновесия шатуна для данного случая (рис. 4.11.б).
Эти условия аналогичны условиям равновесия шатуна при приложении расклинивающей силы к кривошипу – формулы (4.32 – 4.34). Поэтому, как и в предыдущем случае, величина ха может быть найдена по формуле (4.35).
Следовательно
![]() .
(4.47)
.
(4.47)
Для определения
МТО
и МТО
найдем вертикальные и горизонтальные
составляющие реакции опор
![]() и
и
![]() от
действия сил Р3,
ха
и Ррр.
от
действия сил Р3,
ха
и Ррр.
На рис. 4.11 видно,
что при
![]() =
0
=
0
![]() ;
(4.48)
;
(4.48)
![]() ;
(4.49)
;
(4.49)
![]() ,
(4.50)
,
(4.50)
где:
h1 – наименьшее расстояние от оси рычага до линии действия равно-действующей реакции в ближайшем коренном подшипнике эксцентрикового вала;
h2 – то же, между линиями действия равнодействующих реакций в коренных подшипниках эксцентрикового вала.
В этом случае
 ;
(4.51)
;
(4.51)
 .
(4.52)
.
(4.52)
Тогда
 ;
(4.53)
;
(4.53)
 .
(4.54)
.
(4.54)
С учетом формул
(4.35), (4.47), (4.53) и (4.54) при
![]() уравнение (4.46) приобретает вид
уравнение (4.46) приобретает вид
![]()
 .
(4.55)
.
(4.55)
Решение этого уравнения относительно Ррр при известном Нр позволяет определить необходимую величину расклинивающей силы.
Следует отметить, что решение уравнения (4.55) относительно Ррр вызывает трудности, поэтому целесообразно решить обратную задачу, а именно: – задаваясь приемлемыми значениями силы расклинивания Ррр определить соответствующие длины рычага Нр.
Полученные решения позволяют определить зависимость

 .
(4.56)
.
(4.56)
Построив график
зависимости
![]() ,
находим по нему величину Ррр,
соответствующую заданному значению
Нр.
,
находим по нему величину Ррр,
соответствующую заданному значению
Нр.
При
![]() и
и
![]() (что справедливо при
(что справедливо при
![]() )
выражение (4.55) примет вид
)
выражение (4.55) примет вид
![]() ,
(4.57)
,
(4.57)
и, учитывая, что
![]() и
и
![]() ,
получим
,
получим
![]() .
(4.58)
.
(4.58)
Расчеты показывают,
что погрешность вычислений по приближенной
формуле (4.58) при
![]() не более 5%. Поэтому данная формула может
быть рекомендована в качестве основной
(обратим внимание: формула (4.58) подобна
формуле (4.40), что свидетельствует и о
физической аналогии этих разновидностей
способа).
не более 5%. Поэтому данная формула может
быть рекомендована в качестве основной
(обратим внимание: формула (4.58) подобна
формуле (4.40), что свидетельствует и о
физической аналогии этих разновидностей
способа).
В приведенном нами случае величина необходимой расклинивающей силы также может быть уменьшена с помощью привода.
Основные расчетные формулы для определения её величины в данном случае легко получаются из условия равенства моментов на кривошипном валу
![]() (4.59)
(4.59)
и имеют вид

 (4.60)
(4.60)
и
![]() .
(4.61)
.
(4.61)