

4.2. Исследование способа расклинивания силой, прикладываемой к кривошипно-шатунному механизму
4.2.1. Теоретический анализ
Проанализируем каждую из разновидностей предложенного способа расклинивания силой, прикладываемой к кривошипно-шатунному механизму, с целью получения расчетных формул для определения величины необходимой расклинивающей силы.
Анализ проведем в предположении равномерного распределения зазоров в шарнирах механизма. При этом рассмотрим случай наиболее тяжёлого заклинивания, когда ползун пресса (и кривошип) остановился в крайнем нижнем положении.
В этом случае величина силы заклинивания и момент трения будут наибольшими и, следовательно, потребуется и наибольшая расклинивающая сила.
4.2.1.1. Приложение расклинивающей силы к шатуну
Задача определения величины расклинивающей силы состоит в определении той силы, которая выводит данную систему из положения равновесия, т.е. создает в кривошипно-шатунном механизме момент, превышающий момент трения в его шарнирах.
Расчленим кривошипно-шатунный механизм на части (рис. 4.9.а и 4.9.б) и рассмотрим условия равновесия каждой из них при угле поворота кривошипа α = 0.
На рис. 4.9 приняты, кроме уже известных, следующие обозначения:
Нш – плечо силы Ррш на шатуне, равное наименьшему расстоянию от линии её действия до нижней опоры шатуна (точка В), причем Нш по величине может быть как больше, так и меньше L;
Ро, Ра, Рв – реакции в шарнирах О, А и В;
хо, yо, ха, yа, хв, yв – составляющие по осям х и у реакций в шарнирах О, А и В.
МТо, МТа, МТв – моменты трения в шарнирах О, А и В.
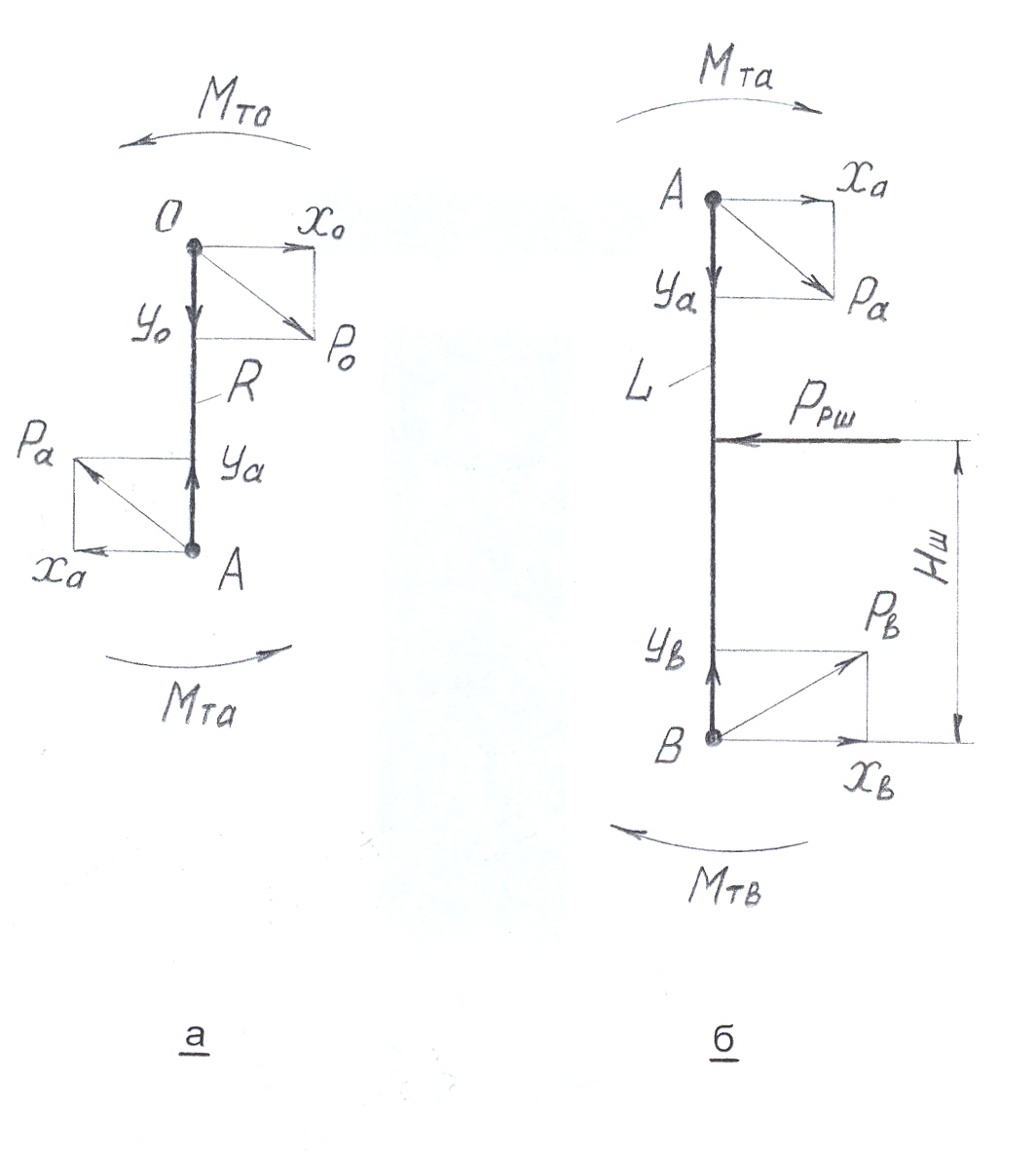
Рис. 4.9. Схема сил и моментов, действующих на элементы
кривошипно-шатунного механизма, при приложении
расклинивающей силы к шатуну
Очевидно, что
![]() ;
(4.1)
;
(4.1)
![]() ;
(4.2)
;
(4.2)
![]() ;
(4.3)
;
(4.3)
![]() ;
(4.4)
;
(4.4)
![]() ;
(4.5)
;
(4.5)
![]() ;
(4.6)
;
(4.6)
Из условий равновесия шатуна следует
![]() ;
(4.7)
;
(4.7)
![]() ;
(4.8)
;
(4.8)
![]() .
(4.9)
.
(4.9)
С учетом формул (4.5), (4.6) и (4.8) последнее уравнение может быть представлено в виде
![]() .
(4.10)
.
(4.10)
Для определения величины ха рассмотрим условия равновесия кривошипа, которые позволяют записать
![]() ;
(4.11)
;
(4.11)
![]() ;
(4.12)
;
(4.12)
![]() .
(4.13)
.
(4.13)
Учитывая формулы (4.4), (4.5), (4.11) и (4.12), уравнение (4.13) можно записать
![]() .
(4.14)
.
(4.14)
Решая полученное уравнение относительно ха, находим
![]() .
(4.15)
.
(4.15)
Для упрощения дальнейшей записи введем обозначение
![]() ,
(4.16)
,
(4.16)
тогда
![]() .
(4.17)
.
(4.17)
Подставив значение ха по формуле (4.17) в уравнение (4.10), получим
![]() .
(4.18)
.
(4.18)
Решая это уравнение относительно Ррш, получим
![]() ,
(4.19)
,
(4.19)
где:
 ;
(4.20)
;
(4.20)
 .
(4.21)
.
(4.21)
Для реально возможных случаев расклинивания кривошипных прессов формулы (4.20) и (4.21) могут быть значительно упрощены.
Так, учитывая, что
![]() и отбрасывая малые величины, получим
приближенную формулу
и отбрасывая малые величины, получим
приближенную формулу
![]() .
(4.22)
.
(4.22)
Как показывают
численные расчеты, подобное упрощение
![]() практически не снижает точности
получаемых результатов.
практически не снижает точности
получаемых результатов.
Принципиально величина этой силы может быть уменьшена, если при расклинивании разогнать в сторону, благоприятную для расклинивания, привод пресса и включить муфту.
Выведем формулу
для определения необходимой силы
![]() ,
прикладываемой к шатуну, в данном случае.
,
прикладываемой к шатуну, в данном случае.
Учитывая формулы (4.4), (4.5), (4.12), (4.14), условие равновесия кривошипа (4.13) для этого случая можно записать
![]() ,
(4.23)
,
(4.23)
где:
К – коэффициент, определяемый по формуле [29],
 .
.
Здесь, как и ранее, J и Jвкл – моменты инерции всех движущихся и разгоняемых при включении муфты масс пресса.
Решая уравнение (4.23) относительно ха, получим
 .
(4.24)
.
(4.24)
Зная величину ха (по формуле 4.24) и решив уравнение (4.10) относительно Ррш, находим
![]() ,
(4.25)
,
(4.25)
где:
 ;
(4.26)
;
(4.26)
 .
(4.27)
.
(4.27)
Поскольку эти формулы могут быть упрощены, аналогично формулам (4.19), (4.20), (4.21), то получим
![]() .
(4.28)
.
(4.28)
Попутно отметим, что в формулу (4.28), а также в (4.26) и (4.27), необходимо подставлять ха, найденное по формуле (4.24).