

1.2. Оценка системных параметров многоканальных измерительных систем
При последовательном сборе информации широко применяют многоканальные ИС, выполненные по классической формуле «датчики+коммутатор+АЦП+ +ЭВМ». Структурная схема такой ИС представлена на рис. 1.17. Эта схема является наиболее распространенной, и 80—90 % систем сбора данных строятся по этой структуре. Здесь КI, КII — аналоговые коммутаторы первой и второй ступеней; УУ — устройство управления (контроллер); ИФУ — интерфейсное устройство. Показан случай, когда часть датчиков (Д1—Дk) подключена напрямую к коммутатору без использования УИП, в предположении, что уровни сигналов соответствуют нормам.
Наиболее часто в ИС реализуют циклический или программно-управляемый опрос датчиков. Рассмотрим основные расчетные соотношения для оценки системных параметров ИС. Пусть имеется n однотипных датчиков (каналов измерения). Максимальная частота в спектре сигнала датчиков равна fмакс. Пусть — требуемая приведенная погрешность измерения. Требуется определить разрядность m и быстродействие АЦП, а также необходимую скорость ввода данных в ЭВМ. Получим расчетные соотношения в предположении квазистатического режима измерений, то есть исключим из рассмотрения динамические погрешности.
Рис. 1.17. Структурная схема
многоканальной измерительной системы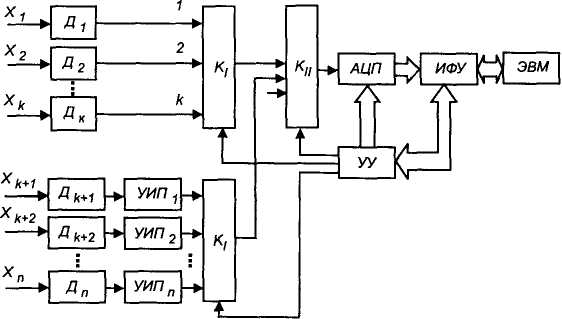
Допустим, что погрешности устройств между собой не коррелируют. Это означает, что устройства электрически или каким-то другим образом не влияют друг на друга. Выполнение такого условия обеспечивается малым выходным сопротивлением предыдущего устройства и большим входным сопротивлением последующего, хорошей электрической развязкой устройств по питанию, экранировкой устройств и т. д.
Для исключения потери информации при прохождении сигнала по каналу должно выполняться условие:
εд≥к≥УВХ≥АЦП. (1.12)
При этом суммарная среднеквадратическая погрешность оценивается выражением:
![]() (1.13)
(1.13)
Причем должно соблюдаться условие <. Необходимая разрядность АЦП определяется выражением:
![]() (1.14)
(1.14)
На втором этапе определим временные параметры устройств ИИС. В большинстве случаев опрос датчиков происходит циклически последовательно со временем цикла Tц. Согласно теореме Котельникова интервал дискретизации t сигнала не должен превышать:
t≤1/(2fмакс). (1.15)
Общее время цикла должно быть Tцt. Так как число датчиков равно n, то длительность измерения по одному каналу tизм не должна превышать значения:
![]() (1.16)
(1.16)
Длительность tизм включает длительности коммутации tк, выборки tв, аналого-цифрового преобразования tАЦП и ввода tвв информации в ЭВМ:
tизм=tк+tв+tАЦП+tвв. (1.17)
Под длительностью выборки здесь понимается время заряда запоминающей емкости (время установления) УВХ. Таким образом, суммарное быстродействие канала должно быть:
tк+tв+tАЦП+tвв1/(2nfмакс). (1.18)
При достаточном быстродействии АЦП можно исключить УВХ. Оценим предельную частоту fx измерительного сигнала, который АЦП способен правильно преобразовать без применения УВХ. Пусть измерительный сигнал представляет собой гармонические колебания ux=Umsin(2ft). За время преобразования tАЦП сигнал успевает измениться на величину:
ux=(dux/dt)tАЦП=2UmftАЦПcos(2ft). (1.19)
Максимально возможное приращение сигнала равно:
|Ux макс|=2UmftАЦП. (1.20)
Отсюда приведенная апертурная погрешность АЦП равна:
а=Ux макс/Um=2ftАЦП. (1.21)
Для правильной оцифровки сигнала необходимо, чтобы приращение сигнала не превышало шага квантования АЦП (веса младшего разряда) U, что соответствует условию аАЦП. С учетом (1.21) и выражения для АЦП получим, что АЦП без УВХ может обеспечить преобразование сигналов с верхней частотой не более:
fмакс1/(2m+1tАЦП). (1.22)
Можно, напротив, оценить требуемое время преобразования АЦП, если заданы погрешность и максимальная частота сигнала:
tАЦПАЦП/(2fмакс). (1.23)
Ограничения (1.22), (1.23) являются достаточно строгими и практически исключают возможность использования АЦП без УВХ. Чтобы убедиться в этом, рассмотрим численный пример. Пусть: tАЦП=10 мкс; m=10. Из (1.22) получим fмакс15,6 Гц.
На третьем этапе осуществляется выбор элементной базы или стандартных устройств автоматизации и вычислительных устройств или ЭВМ, которые удовлетворяют полученным выше оценкам по точности и быстродействию.
Рассмотрим пример оценки системных параметров ИС. Пусть требуется разработать 10-канальную ИС, обеспечивающую приведенную погрешность измерения 0,8 %. Датчики (n=10) имеют одинаковые полосу пропускания fмакс=1 кГц и погрешность преобразования д= =0,5 %.
Распределение (декомпозиция) погрешностей. Пусть погрешности выбранных (из справочников или каталогов фирм) аналогового коммутатора и УВХ равны к=0,3 %; УВХ=0,3 %. Тогда на долю АЦП согласно (1.13) допускается погрешность:
![]() (1.24)
(1.24)
Подставив в (1.24) числовые значения, получим АЦП<0,26 %. Определяем согласно (1.14) разрядность АЦП. Получим m>9.
Определение временных (динамических) параметров. Вычисляем длительность измерения по одному каналу: tизм0,5nfмакс=50 мкс. Пусть длительности коммутации и выборки равны соответственно 2 мкс и 1 мкс. Тогда на долю АЦП и ЭВМ согласно (1.17) остается временной ресурс tАЦП+tвв50–3=47 мкс. По каталогам фирм или справочников выбираем подходящий аналого-цифровой преобразователь. Пусть разрядность и время преобразования выбранного АЦП равны соответственно m=10, tАЦП=30 мкс. Следовательно, длительность ввода информации в ЭВМ не должна превышать tвв47–30=17 мкс. Необходимая скорость передачи данных через входной интерфейс ЭВМ составит cвв1/tвв=59 кслов/с. Для вычислительных устройств, например имеющих параллельный порт байтового формата, посылка 10-разрядного кода будет происходить за два цикла, поэтому скорость ввода должна быть удвоена. Если скорость ввода недостаточна, необходимо использовать буферную память.
На практике обычно датчики или измерительные каналы имеют различные полосы пропускания f1, f2, ..., fn, что делает последовательный циклический опрос невыгодным. Необходимо чаще опрашивать те датчики, которые имеют более высокую полосу пропускания (т. е. более информативны). Очевидно, что частота опроса i-го канала должна быть пропорциональна коэффициенту kt=fi/fк мин, где fк мин — канал, имеющий минимальную полосу пропускания. Этого можно добиться программно-управляемым опросом коммутатором.
Полученные оценки системных параметров ИС являются приближенными. Для дальнейшего метрологического анализа и изучения динамических режимов работы ИС необходимо компьютерное моделирование работы ИС.