

Учебное пособие 559
.pdfTB = mB i22 v2. 2 R
Цилиндр С совершает плоское движение, его кинетическая энергия
|
m v2 |
J |
C |
ω2 |
|
T |
= C C + |
|
C |
, |
|
|
|
|
|||
C |
2 |
|
2 |
|
|
где vC – скорость центра цилиндра, JC – момент инерции цилиндра относительно оси, проходящей через его центр
JC = |
m R2 |
= |
m (r / 2)2 |
= |
m r2 |
C C |
C |
C . |
|||
|
2 |
|
2 |
|
8 |
vA |
B |
vA |
|
|
A |
vB |
|
D |
C |
|
|
|
|
vB  vC
vC  α
α
Рис. 3.3. К определению кинематических соотношений
Выразим vC и |
ωС через v (рис. 3.3). Точки внутреннего обода блока |
имеют линейную |
скорость ωB r =(r / R)v . Цилиндр катится без |
проскальзывания, поэтому точка его соприкосновения с наклонной плоскостью является мгновенным центром скоростей тела, через неё проходит мгновенная ось вращения цилиндра С. Тогда его угловая скорость вращения
ωC = |
(r / R)v = |
(r / R)v |
= |
v |
. |
2(r / 2) |
|
||||
|
2RC |
|
R |
||
Соответственно скорость центра цилиндра С
vC =ωC RC = Rv 2r = 2rR v.
В результате кинетическую энергию цилиндра С можно выразить через скорость груза А
|
m |
r2 |
v2 + |
m r2 |
v2 |
|
3 |
|
r2 |
v2. |
|
T = |
C |
|
C |
|
= |
|
|
m |
|
||
|
|
16 |
|
||||||||
C |
2 4R2 |
|
2 8 R2 |
|
C R2 |
|
|||||
Кинетическая энергия системы трёх тел примет вид
|
v |
2 |
|
i |
2 |
|
3 |
|
r |
2 |
|
||
T =TA +TB +TC = |
|
|
|
|
+ |
mC |
|
|
|
||||
|
|
|
|
2 |
|
|
|
2 |
|||||
2 |
mA + mB |
R |
8 |
R |
. |
||||||||
|
|
|
|
|
|
|
|||||||
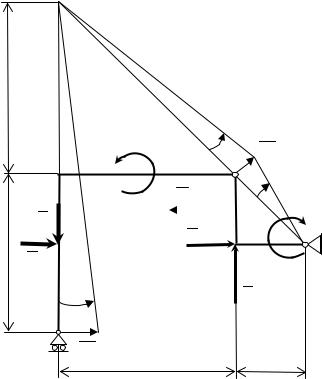
Определим сумму работ всех внешних сил системы (рис. 3.4). Реакции опор N A и NC работы не совершают, так как они направлены перпендикулярно
21

направлению смещения точек, к которым эти реакции приложены. Работа силы тяжести GA равна нулю, так как отсутствует смещение груза А по вертикали.
Реакции оси X B ,YB и вес GB приложены к неподвижной точке крепления блока В, поэтому их работа также равна нулю. Сила сцепления Fсц цилиндра С
приложена к мгновенному центру скоростей (по определению – неподвижная точка в данный момент времени), следовательно, её работа равна нулю. Итак,
∑Ake = A(Fтр ) + A(GC ) + A(M тр ). |
|||
|
B |
YB |
N A |
|
|
A |
|
|
|
X B |
Fтр |
C |
Mтр |
|
GA |
GB |
|
||
NC |
Fсц |
|
|
SC |
|
|
|
|
|
|
|
|
α |
|
|
|
GC |
|
|
Рис. 3.4. Внешние силы системы тел А, В и С |
|||
В общем случае Fтр= fN, Mтр= kN, где N – соответствующая нормальная реакция (если тело находится на горизонтальной плоскости, то N равно весу этого тела, а если на наклонной, то N равно весу, умноженному на косинус угла наклонной плоскости с горизонталью). Следовательно,
|
Fтр = fGA = f mA g, |
M тр = k mC g cosα. |
||||||
Так как |
vC = sC , |
v = sA = s, |
ωC |
=ϕC , |
то интегрируя кинематические |
|||
соотношения |
ωC =v / R, |
vC =(r / 2R)v |
при |
нулевых начальных условиях, |
||||
получим |
|
|
s |
|
|
|
r |
|
|
|
ϕC = |
, |
sC = |
s. |
|||
|
|
|
2R |
|||||
|
|
|
R |
|
|
|
||
Врезультате сумма работ внешних сил выражается через s
∑Ake = −Fтрs +GC sC sinα − M трϕC =
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
= g |
− m |
|
f + m |
|
|
sinα |
− m |
|
|
cosα |
s. |
|
|
|
||||||||
|
|
|
|
|
|
|
R |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
C 2R |
|
C |
|
|
|
|
|
|
||||
Приравняем кинетическую энергию Т сумме работ внешних сил |
|
|||||||||||||||||||||||||
v |
2 |
|
i |
2 |
|
3 |
|
|
r |
2 |
|
|
|
|
|
|
|
r |
|
|
k |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− mC |
s. |
|||||||||
2 |
mA + mB |
R |
2 |
+ |
8 |
mC |
R |
2 |
|
= g |
− mA f |
+ mC |
|
2R |
sinα |
R |
cosα |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Подставим числовые значения
22

v2 |
75 = g 12.25 s, |
v |
2 |
= |
9.81 12.25 1.2 |
=3.84, v =1.96 (м/с). |
|||
2 |
|
|
37.5 |
|
|||||
|
|
|
|
|
|
|
|
||
Определим ускорение а груза А. Дифференцируя по времени равенство |
|||||||||
(v2 / 2) 75 = g 12.25 s , с учётом |
s =v, |
v = a , получим |
|
||||||
|
1 |
|
|
|
|
|
9.81 12.25 |
2 |
|
|
2 2v a 75 = g 12.25 |
v, |
|
|
a = |
75 |
=1.6 (м/с ). |
||
Найдём ускорение груза А другим способом, с помощью общего уравнения динамики.
К действующим на систему силам добавим инерциальные силовые факторы: силы инерции и моменты сил инерции (рис. 3.5). Согласно общему уравнению динамики сумма работ всех сил, приложенных к системе, включая силы инерции, на возможных перемещениях равна нулю.
|
|
δϕВ |
|
δSA |
|
|
|
|
|
|
|
M BФ |
|
B |
|
ФА |
|
|
|
|
|||
|
|
A |
|
||
|
|
|
|
Fтр |
|
δSC |
|
|
|
|
|
|
|
|
|
|
|
Mтр |
ФС |
|
|
GA |
|
|
|
|
|
||
δϕC |
|
|
GB |
|
|
MCФ |
|
|
|
|
|
Fсц |
|
|
|
|
|
|
|
|
|
|
|
C |
α |
|
|
|
|
|
GC |
|
|
|
|
Рис. 3.5. Возможные смещения, внешние и инерциальные силы
Дадим грузу А возможное перемещение δsA, направленное влево. Тогда блок В повернётся на угол δφВ, а каток С повернётся га угол δφС с одновременным смещением центра на δsС. Между этими смещениями имеется связь, аналогичная связи между перемещениями тел системы, определённая ранее при нахождении скорости груза с помощью теоремы об изменении кинетической энергии:
δϕВ =δϕC = |
δsА |
, |
δsC = |
r |
δsА. |
|
2R |
||||
|
R |
|
|
||
Раскрывая общее уравнение динамики ∑δАk + ∑δAkΦ =0, получим
− Fтр δsA +GC δsC sinα − M тр δϕC −
−ΦA δsA − M BΦ δϕB −ΦC δsC − MCΦ δϕC =0,
23
где Fтр = fN A = fmA g , |
GC = mC g , |
M тр = kNC = kmC g cosα ; |
|||||||||||||||||||||||
Φ |
A |
= m |
A |
a , |
M Φ = J |
B |
ε |
B |
, |
Φ |
C |
= m a |
C |
, |
M Φ |
= J |
C |
ε |
C |
. |
|||||
|
|
|
|
B |
|
|
|
|
C |
|
C |
|
|
|
|
||||||||||
Продифференцировав по времени уже имеющиеся соотношения для |
|||||||||||||||||||||||||
скоростей |
ωB =ωС =v / R и |
vC =(r / 2R)v , получим связь линейных и угловых |
|||||||||||||||||||||||
ускорений |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
r |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
εB =εC |
= |
, |
|
aC = |
a . |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
2R |
|
|
|
|
||
Подставим в общее уравнение динамики все представленные выше выражения для величин, входящих в это уравнение
−fmA g δsA + mC g sinα 2rR δsA − kmC g cosα δRsA −
−mAa δsA −iB2 mB Ra δRsA − mC 2rR a 2rR δsA − mC8r2 Ra δRsA =0.
Сокращаем на δsA (по предположению δsA ≠ 0)
|
|
r |
|
k |
|
|
i |
2 |
|
3 |
|
r |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|||||||
g |
− mA f + mC |
|
sinα − mC |
|
cosα |
|
|
2 |
+ |
|
mC |
|
|
2 |
||
2R |
R |
= a mA + mB |
R |
8 |
R |
. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Выражения в скобках уже встречались выше при применении теоремы об изменении кинетической энергии системы. Подставим их значения
a =9.81 1275.25 =1.6 (м/с2).
Второй способ даёт то же значение ускорения.
Ответ: 1) D = 14.4 см; 2) v = 1.96 м/с, a = 1.6 м/с2.
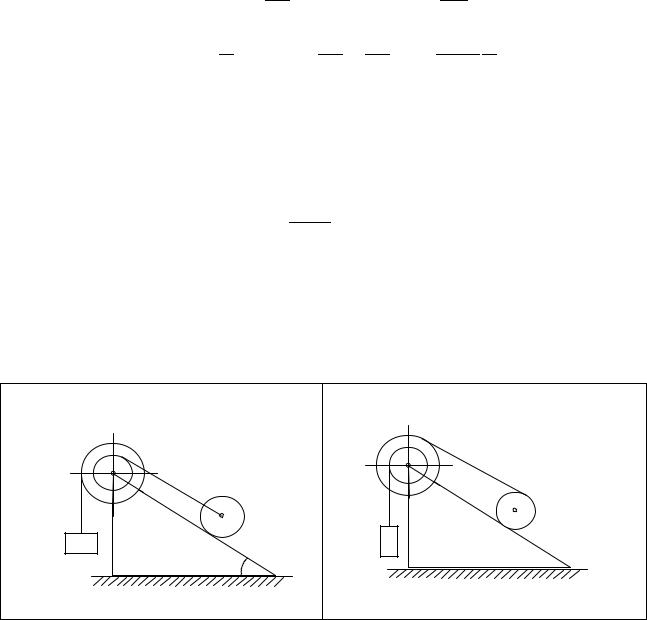
Таблица 3.1 Варианты рисунков к задаче Д3 (предпоследняя цифра шифра)
B |
RC = r |
|
|
C |
|
A |
D |
|
α |
||
|
||
|
Рис. 0 |
B |
RC = R / 2 |
|
|
|
C |
D
A
α
Рис. 1
24
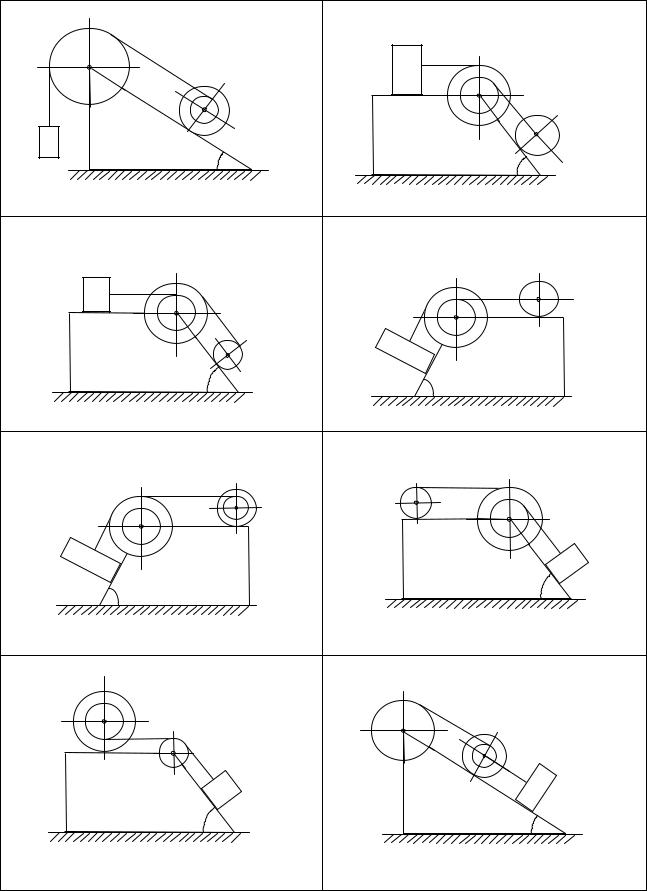
|
RC = R + r |
|
|
RC = r |
|
C |
|
A |
|
B |
|
|
|
|
|||
|
B |
|
|
||
|
|
|
C |
||
D |
|
D |
|
||
|
|
|
|||
A |
|
|
|
||
α |
|
α |
|||
|
|
||||
|
Рис. 2 |
|
Рис. 3 |
|
|
RC =R /2 |
R C = r |
|
|
||
A |
B |
B |
C |
||
|
|||||
D |
C |
A |
|
D |
|
|
|
||||
|
α |
|
α |
|
|
|
Рис. 4 |
|
Рис. 5 |
|
|
|
R C =R + r |
C |
B |
RC =R /2 |
|
C |
B |
|
|||
|
|
|
|||
A |
D |
A |
|
α |
α |
|
Рис. 6 |
|
|
Рис. 7 |
B |
RC =R - r |
|
C |
R C =R + r |
|
|
|
|
|
|
C |
|
|
B |
|
|
|
|
|
D |
|
A |
|
A |
|
|
D |
||
|
|
|
||
|
α |
|
|
α |
|
Рис. 8 |
|
|
Рис. 9 |
25
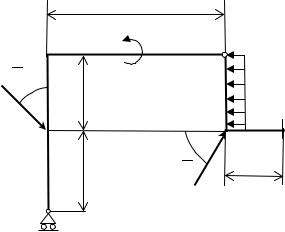
Таблица 3.2
Исходные данные к задаче Д3
Посл. |
mA |
mB |
mC |
mD |
R |
|
i |
k |
f |
α |
s |
|
шифрацифра |
|
|
|
|
|
|
|
|
r |
|
|
|
кг |
кг |
кг |
кг |
r |
|
r |
|
град |
м |
|||
0 |
46 |
54 |
90 |
200 |
2.0 |
1.0 |
0.05 |
0.1 |
15 |
1.1 |
||
1 |
47 |
53 |
10 |
190 |
2.1 |
1.1 |
0.06 |
0.05 |
30 |
0.2 |
||
2 |
44 |
56 |
20 |
180 |
2.2 |
1.2 |
0.07 |
0.06 |
45 |
0.3 |
||
3 |
42 |
58 |
30 |
170 |
2.3 |
1.3 |
0.09 |
0.08 |
60 |
0.4 |
||
4 |
48 |
52 |
40 |
160 |
2.4 |
1.4 |
0.08 |
0.09 |
75 |
0.5 |
||
5 |
41 |
59 |
50 |
150 |
1.5 |
1.5 |
0.06 |
0.05 |
15 |
0.6 |
||
6 |
49 |
51 |
40 |
140 |
2.6 |
1.6 |
0.04 |
0.09 |
30 |
0.7 |
||
7 |
43 |
57 |
70 |
130 |
2.7 |
1.7 |
0.03 |
0.04 |
45 |
0.8 |
||
8 |
40 |
60 |
30 |
120 |
2.8 |
1.8 |
0.02 |
0.07 |
60 |
0.9 |
||
9 |
45 |
55 |
90 |
110 |
2.9 |
1.9 |
0.01 |
0.08 |
75 |
1.0 |
||
ЗАДАЧА Д4
Пользуясь принципом возможных перемещений, для составной конструкции из двух тел, соединённых между собой с помощью шарнира С, определить следующие неизвестные: MA, RB (рис. 0, 3, 6, 9); RA, XD (рис. 1, 4, 7); YA, XB (рис. 2, 5, 8). Схемы конструкций показаны на рис. 0 – 9 таблицы 4.1, а необходимые для решения данные приведены в таблице 4.2.
Указания. Задача Д4 относится к теме «Принцип возможных перемещений» [1, §§138-140], [2, §§113, 114, 116], который позволяет определять составляющие любой реакции связи независимо от других реакций. Это особенно удобно в том случае, когда требуется определить реакции не всех опор, а одной или нескольких.
Пример Д4.
|
2a |
M |
C |
F |
a |
|
q |
α |
|
||
|
|
||
|
|
B |
|
|
|
|
|
|
|
|
β |
|
a |
P |
a |
A |
|
|
|
|
Рис. 4.1. Условие задачи |
||
|
|
|
26 |
Дано: a = 3 м, F = 40 кН,
Р= 25 кН, q = 12 кН/м,
α= 300, β = 450.
Найти: реакции опор.
Решение. Конструкция, состоящая из двух тел АС и ВС, имеет в точке А шарнирно-подвижную опору, а в точке В – жёсткое защемление. Следовательно, реакция в точке А имеет только одну вертикальную
составляющую RA , а реакция заделки – три: горизонтальную составляющую X B , вертикальную YB и момент МВ.
Найдём реакцию подвижной опоры А, для чего мысленно отбросим эту связь, заменив её действие реакцией RA (рис. 4.2). Система получает одну
степень свободы – поворот части АС вокруг точки С, при этом часть ВС |
||
остаётся неподвижной. |
2a |
|
|
|
|
δϕ |
M |
C |
δSD |
|
|
|
|
|
D |
|
q |
|
|
|
|
F ′′ |
|
|
B |
|
|
δϕ |
|
|
F ′ |
|
|
β |
|
|
|
|
||
|
|
|
P |
a |
|
|
|
|
δSA  A
A
RA
Рис. 4.2. К определению реакции RA
Разложим силу F на горизонтальную и вертикальную составляющие:
F′= F sinα = 40 0.5 = 20 кН, F′′= F cosα = 40
 3 / 2 =34.64 кН.
3 / 2 =34.64 кН.
Сообщим системе возможное перемещение (поворот) δφ>0. Составим уравнение элементарных работ, выражающее принцип возможных перемещений, учитывая, что работа силы при повороте тела равна произведению момента силы относительно центра вращения на угол поворота и положительна, если направления момента и угла поворота совпадают:
RA 2a δϕ − F′a δϕ − F′′2a δϕ − M δϕ =0
или (RA 2a − F′a − F′′2a − M ) δϕ =0 .
Так как δφ>0, то равенство выполняется лишь в том случае, когда выражение в скобках равно нулю. Отсюда
RA = F′/ 2 + F′′+ M / 2a =53.81 кН.
Для определения горизонтальной составляющей заделки X B представим опору В в виде ползуна в горизонтальных направляющих и приложим реакцию
X B (рис. 4.3). |
Равномерно |
распределённую |
нагрузку |
q заменим |
сосредоточенной |
силой Q = q·a |
= 36 кН, а P , |
как и F , |
разложим на |
горизонтальную и вертикальную составляющие:
P′= Pcos β =17.68 кН, P′′= Psin β =17.68 кН.
27

M |
δSC |
|
δSA |
C |
|
|
Q |
|
|
|
|
|
F |
′′ |
|
B |
X B |
|
|
|
P′ |
|
||
F |
′ |
|
|
δSB |
δSB |
|
|
|
|
|
|||
δSA |
A |
|
|
P′′ |
|
|
|
|
a |
|
|||
Рис. 4.3. К определению составляющей X B реакции в точке В
Сообщим всей конструкции направленное влево возможное поступательное перемещение δ s = δsA = δsB = δsC > 0, так как поворот ползуна в направляющих невозможен. Составим уравнение возможных работ, учитывая, что работа силы при поступательном движении тела равна проекции силы на направление перемещения, умноженной на величину перемещения. Знак работы определяется по знаку проекции силы на направление движения. Если сила перпендикулярна направлению смещения, то её работа на этом перемещении равна нулю. Момент при поступательном движении работы не совершает.
X B δs +Q δs − P′ δs − F δs =0
или (X B +Q − P′− F) δs =0.
Приравнивая нулю выражение в скобках, получим
X B = P′+ F′−Q =1.68 кН.
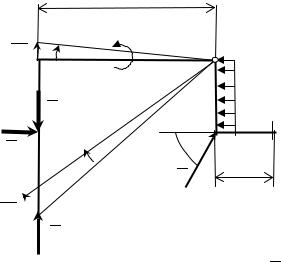
Для определения вертикальной составляющей YB реакции заделки
отбросим связь, препятствующую вертикальному перемещению точки В, заменив жёсткую заделку скользящей с вертикальными направляющими и
приложим реакцию YB (рис. 4.4). |
δϕ |
|
|
|
|
M |
|
|
|
|
|
|
δSC |
|
|
O |
|
|
|
|
|
|
C |
Q |
|
F ′′ |
δSB |
|
|
|
|
δSB |
||
2a |
|
P ′ |
|
B |
F ′ |
|
|
||
|
|
YB |
||
|
|
|
||
|
δϕ |
|
|
|
|
A |
|
|
P ′′ |
|
|
|
|
|
|
δSA |
2a |
|
a |
|
|
|
||
Рис. 4.4. К определению составляющей YB реакции в точке В
28
Сообщим части ВС возможное перемещение δs = δsB = δsC, направленное вертикально вверх. Тогда другая часть конструкции АС будет совершать плоское движение. Так как перемещение δsС = δs в точке С направлено вертикально вверх, а перемещение δsА точки А – горизонтально (связь опоры А,
имеющей реакцию RA , препятствует её вертикальному перемещению), то
мгновенный центр вращения (точка О) тела АС находится на пересечении перпендикуляров к направлениям перемещений в точках А и С. При этом элементарный угол поворота АС вокруг точки О выражается через δs формулой
δϕ =δsC / 2a =δs / 2a .
Составим уравнение возможных работ для определения YB :
YB δs + P′′ δs + M δϕ + F′a δϕ =0,
YB δs + P′′ δs + (M / 2a) δs + (F′/ 2) δs =0,
YB = −P′′− M / 2a − F′/ 2 = −36.85 кН.
Знак минус показывает, что вертикальная составляющая заделки направлена в сторону, противоположную направлению, показанному на рис. 4.4.
Для определения момента заделки МВ заменим заделку шарнирнонеподвижной опорой и приложим к конструкции момент МВ (рис. 2.5).
O
2a
2a
|
|
|
δϕ2 |
|
|
M |
|
|
δSC |
|
|
|
|
|
|
|
Q |
C |
δϕ1 |
|
|
|
||
|
|
|
MB |
|
F ′′ |
|
P′ |
|
|
|
|
|
|
|
F ′ |
|
|
|
B |
|
|
|
|
δϕ2 |
P′′ |
A |
2a |
δSA |
|
|
a |
Рис. 4.5. К определению реактивного момента M B
Сообщим системе возможное перемещение, повернув ВС вокруг шарнира В на возможный угол поворота δφ1. Часть АС конструкции в этом случае будет совершать плоское движение вокруг мгновенного центра вращения О,
29
положение которого определяется точкой пересечения перпендикуляров к направлениям смещений в точках А и С. При этом
δsC = BC δϕ1 =OC δϕ2 → δϕ2 =(BC /OC) δϕ1,
BC = |
a2 + a2 |
= a |
|
, OC = |
(2a)2 + (2a)2 |
= 2a |
|
→ δϕ |
|
=δϕ / 2 . |
2 |
2 |
2 |
||||||||
|
|
|
|
|
|
|
|
|
1 |
Составим уравнение возможных работ для определения момента МВ
M B δϕ1 + P′′a δϕ1 −Q(a / 2) δϕ1 + M δϕ2 + F′3a δϕ2 =0 ,
M B δϕ1 + P′′a δϕ1 −(Qa / 2) δϕ1 + (M / 2) δϕ1 + (F′3a / 2) δϕ1 =0 ,
M B =Qa / 2 − P′′a − M / 2 − F′3a / 2 = −116.54 кН·м.
Ответ: RA = 53.81 кН, XB = 1.68 кН, YB = – 36.85 кН, MB = – 116.54 кН·м.
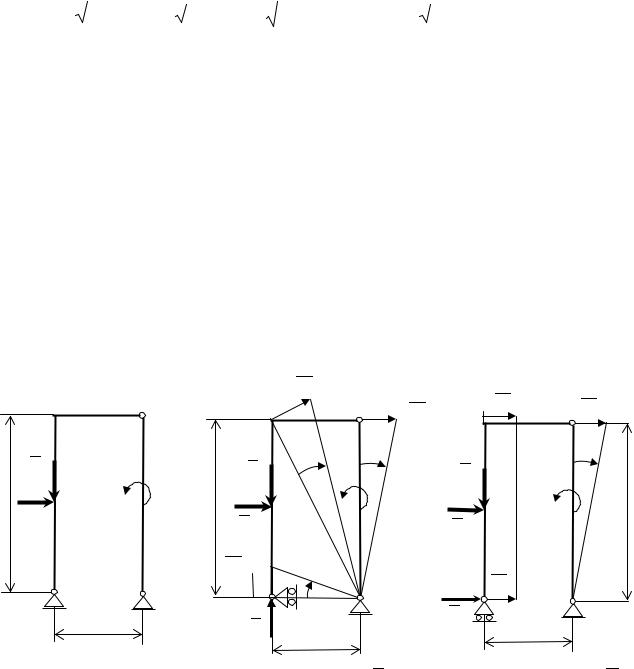
Кратко рассмотрим другие варианты возможных перемещений конструкции. При определении горизонтальной и вертикальной составляющих реакции шарнирно-неподвижной опоры её заменяют шарнирно-подвижной опорой (рис. 4.6, а – в). На рис. 4.6,б вся конструкция АВС совершает мгновенно-вращательное движение вокруг центра вращения точки О, совпадающей с точкой В; на рис. 4.6,в балка ВС вращается вокруг точки В, а угольник АС совершает мгновенно-поступательное движение, так как направления перемещений в точках А и С параллельны.
D C
F ′′
M
2a |
|
|
|
|
F ′ |
||||
|
||||
A |
B |
|
a |
а) схема конструкции
2a
|
δSD |
|
D |
C |
δSC |
|
δϕ |
δϕ |
F ′′ |
|
|
M |
|
|
|
|
F′
δSA δϕ
δϕ
B
YA A a
б) к определению YA
Рис. 4.6
D |
δSD |
δSC |
|
C δϕ
F ′′
M
F ′ |
2a |
|
A |
δSA |
B |
X A |
|
|
|
a |
|
|
|
в) к определению X A
30